



部分3: 稳定性和延迟
3.1 引言
我们现在已从前几节中熟悉了反馈控制回路的基本特性 本系列,在 部分2我们现在要讨论一个容易让刚进入该领域的人感到困惑的话题:稳定性。幸运的是,频域中的操作可以相对简单地处理这个话题。
部分1 建立传递函数的定义,并提供了构建控制回路框图以对复杂系统进行建模所需的组件。在 部分2 我们演示了如何使用反馈控制系统来抑制干扰或跟踪过程设定点。还讨论了与噪声传感器相关的复杂性。与开环系统不同,反馈控制下的设备有可能变得不稳定,并且性能和稳健性之间存在矛盾。最终,信号传播的延迟可能会施加最严格的限制。这些问题将在第 3 部分中讨论。在频域中,反馈系统的大多数参数都可以与其开环传递函数相关联。在 部分4 我们解释了如何测量这个重要数量,并提供了塑造它时经常使用的函数列表。 部分5 描述了一种避免执行器饱和的方法,并在此过程中介绍了对处理多个执行器有用的想法。我们的系列文章总结如下: 部分6 随着研究 PID控制器。这种常见的控制架构通常从时域的角度来考虑;我们说明了互补的频域表示。
3.2 稳定性
我们注意到,到目前为止推导的所有传递函数都具有 1 + G,在 Moku:Pro 上 G 是开环传递函数。因此,如果 G = −1 时,系统将变得不稳定,输出无界。事实上,即使接近 −1 点也会导致振铃和增益峰值(见图 3.2).
因此我们定义增益和相位 利润率 量化我们距离这个不稳定点还有多远。
增益裕度: 令 \(omega_{180}\) 是频率 ∠G = −180°. 增益裕度, GM 然后定义为
\(GM = frac{1}{left| G(iomega_{180})right|}\)或\(GM[dB] = -20 log_{10} left(left| G(iomega_{180})right| right)\)。
一般来说,增益裕度告诉我们在达到 G = −1 分。在这种情况下,由于工艺效率或校准等因素而导致的增益变化与用户发起的变化同样重要,甚至更重要。
相位裕度: 回想一下 \(omega_{UGF}\) 是频率|G| = 1. 相位裕度 PM 被定义为
\(PM = 180^{circ} + 角度 G(i omega_{UGF})\)。
相位裕度描述了在达到不稳定状态之前我们可以容忍多少额外的相位延迟。
我们在制定这些利润时假设了一个阶段 落后,这是正常情况。如果开环传递函数表现出相位 铅, 我们将构建利润,重点关注 ∠G = +180• 点,其中 G = −1 是可以实现的。
为了确保稳定性,我们必须有一个正相位裕度,\(左| 角度 G(i omega_{UGF}) 右| < 180^{circ}\), 并且系统一开始就是开环稳定的。
更正式地说,如果 1 + G(s) 包含右半平面零点。严格的处理还表明,即使我们没有达到 G = −1。上述规则涵盖了大多数系统(即最小相位系统)的这种可能性。
系统表现出任一类型的多个裕度也很常见。在评估闭环稳定性时,应分别考虑每一个裕度。图 3.1 显示带有增益和相位裕度的典型开环频率响应。
在本系列的这一部分中,我们主要关注的是稳定性。我们强调稳定性与稳健性不同。要实现一个稳健的系统,需要 PM 以及 GM 应该尽可能大。遗憾的是,较大的裕度往往会降低绝对性能,设计人员必须做出明智的权衡(见图 3.2).
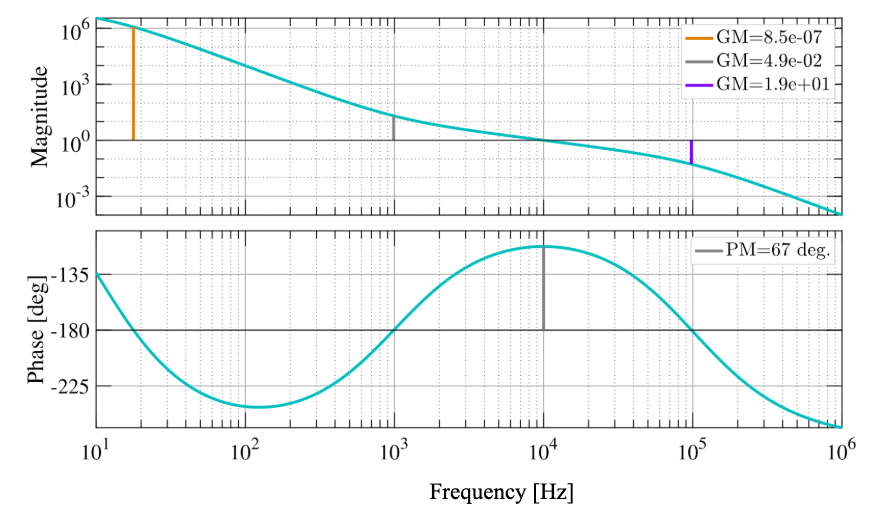
图 3.1:典型开环传递函数的增益和相位裕度。该系统具有多个增益裕度,当增益增加时可能会变得不稳定 or 减少。这种系统被称为 有条件的 稳定。如果系统有条件稳定,则在获取锁定时必须小心谨慎。逐渐增加增益以达到所需的工作点是行不通的。

图 3.2:顶部:两个开环传递函数。第一个的单位增益为 1 kHz;第二个为 5 kHz,通过简单地增加总增益实现。底部:相应的 1/(1 +G)传递函数(与抗扰动相关,参见(2.1))。观察到增加增益可改善低频性能。然而,在单位增益附近,干扰实际上被放大了。这种现象称为 增益峰值。增益峰值随相位裕度减小而增加。另见图 3.4(附录 A).
经验法则:
- 单位增益下的 OLTF 斜率应为 1/f
- 增益裕度应大于 2 或小于 0.5
- 相位裕度应 > 30° 用于抗干扰和 > 45° 用于参考追踪
3.3 延迟
反馈回路中的任何延迟都会影响稳定性。延迟可能是由于数字处理而产生的,也可能是工厂固有的——想象一下淋浴太冷,然后突然又太热。延迟的传递函数 τ ,在 拉普拉斯域 is
\(H_{延迟}(tau, s) = e^{-s tau}\)。
这样的延迟将使相位裕度减少 \(omega_{UGF} tau\)。 数字 3.3 绘制延迟的传递函数及其对典型 OLTF 的影响。
延迟通常会限制最终环路的性能,因为它们是需要稳定的系统不可分割的一部分,无法消除。

图 3.3:顶部:延迟的频率响应(本例中为 10 µs)。 在所有频率下,幅度等于一,相位角为 -ωτ。底部:包含(蓝色实线)和不包含(橙色虚线)上述延迟的典型 OLTF。延迟会降低相位裕度并限制设计自由度。
3.4 结语
在本系列的这一卷中,我们部署了量化系统与不稳定状态“距离”的指标,并观察到回路可以通过增益峰值放大干扰,尤其是在存在不可避免的延迟的情况下。在大多数情况下,性能和稳定性对反馈控制回路的设计提出了相反的要求。回路设计的真正艺术在于调整控制器的形状以同时平衡各种约束。这种“回路整形”将在下一篇中介绍 部分4 我们的系列。
附录A: 图系统的阶跃响应 3.2

图 3.4:图中描述的两个系统的时间响应 3.2 到设定点的单位阶跃。较小的相位裕度会导致更大的过冲和更多 振荡行为。由于我们目前的处理以频域技术为中心,因此该图已归入附录。尽管如此,我们希望将其纳入可以强调这两个领域的重要性和互补性。

