稳定性测量
反馈回路,尤其是在电力电子领域,需要对其稳定性进行表征,以判断系统是否按预期运行。通过测量回路行为,可以观察频率交叉点、增益裕度和相位裕度等参数,从而评估其稳定性,并据此调整回路调谐参数。
通常使用频率响应分析仪或矢量网络分析仪,通过测量波特图中的环路增益和相位来评估稳定性。Moku:Pro 频率响应分析仪 可以向被测设备 (DUT) 输出多达四个注入交流信号,并同时接收四个响应信号,以绘制相对于输出注入信号的增益和相位。
测量环路增益最传统、最直接的方法是侵入式地接入控制环路电路,在与反馈回路串联的注入电阻上注入扰动信号。该电阻的一端连接到反馈回路,另一端连接到稳压器的响应端。利用频率响应分析仪分析这两个电压的比值(输出/输入),即可测量增益裕度和相位裕度,用于稳定性评估。
这种方法的主要缺点是,要插入注入电阻,必须物理断开控制回路电路。在无法直接接触回路的情况下,例如封装集成电路或高密度印刷电路板等完全封闭的系统,这种方法并不总是可行。此外,对于已经设计和组装好的器件,通常也无法拆卸走线或添加元件。
避免物理回路中断的另一种方法是从闭环电路的输出阻抗推导出相位裕度。这种方法被称为非侵入式稳定性测量(NISM),它利用品质因数(Q)来计算回路的相位裕度,而品质因数则由输出阻抗的幅值和相位图计算得出。
NISM 方法 – 二阶系统
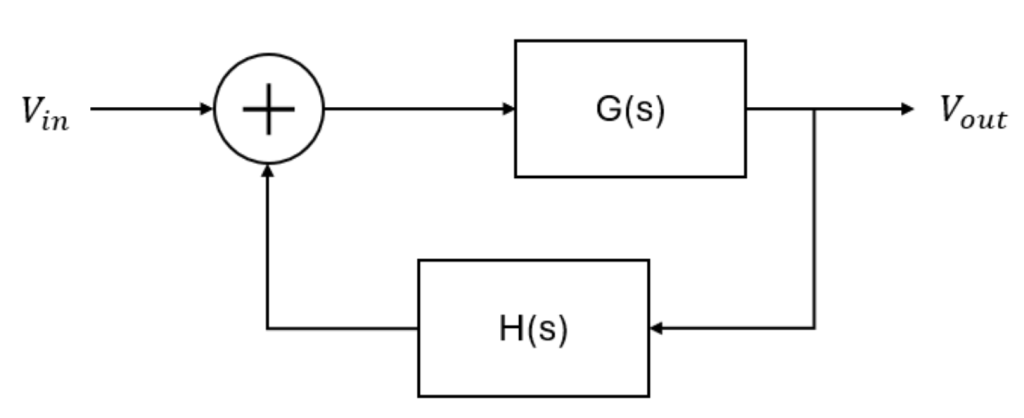
控制反馈回路通常被建模为二阶系统,因为其动态特性能够捕捉系统行为最重要的方面,例如稳定性、阻尼和瞬态响应。许多现实世界的系统在技术上是更高阶的。然而,它们的行为通常由一对复共轭极点主导,这两个极点比所有其他极点更靠近s平面上的虚轴。这些极点被称为主导极点。在这种情况下,系统可以用二阶模型精确近似,从而简化分析,同时又不丢失关于其整体行为的关键信息。图1展示了一个通用控制反馈系统的示意图,其中\(G(s)\)表示被控对象和控制器的传递函数,\(H(s)\)表示反馈传递函数。\(G(s)\)的定义如公式1所示。利用标准的回路代数,我们可以得到闭环传递函数,如公式2所示。
\(G(s) = \frac{V_{out}}{V_{in}+V_{out}H(s)}\) (1)
\(\frac{V_{out}}{V_{in}} = \frac{G(s)}{1+H(s)G(s)}\) (2)
对于二阶系统,方程 1 可以用方程 3 所示的标准规范形式表示 [1,方程 (6.29)]。
\(G(s) = \frac{\omega_n^2}{s(s+2 \zeta \omega)}\) (3)
其中 \(\omega_n\) 为固有频率,\(\zeta \) 为阻尼比。
假设反馈传递函数等于 1(单位反馈),则闭环传递函数(公式 2)变为 [1,公式 (6.30)]:
\(T(s) = \frac{V_{out}}{V_{in}} = \frac{\omega^2_n}{s^2 + 2 \zeta \omega_n s + \omega_n^2}\) (4)
这是二阶系统的标准传递函数方程。通过该方程,我们可以计算品质因数 Q,它是衡量系统谐振性能的指标。首先,我们对方程 4 的分母应用二次方程求根公式,得到极点:
\(s = -\zeta \omega_n \pm j \omega_n \sqrt{1-\zeta^2}\)
质量因子可计算如下:
\(Q = \frac{\omega}{2 \sigma}\)
其中 \(\omega\) 为振荡角频率,或极点 \((\omega_n \sqrt{1-\zeta^2})\) 的虚部,σ 为振荡衰减率,或极点 \((\zeta \omega_n)\) 的实部。将公式 5 的实部和虚部代入公式 6,我们得到:
\(Q = \frac{\sqrt{1-\zeta^2}}{2 \zeta}\)
当 \(\zeta \ll 1\)
\(Q \sim \frac{1}{2 \zeta}\)
虽然我们现在知道了 Q 值和阻尼比之间的关系,但我们无法直接测量系统的阻尼比。然而,我们可以测量输出阻抗的增益和相位,从而得到诸如群延迟 (\(\tau_g\)) 之类的参数,群延迟是指信号包络通过系统时的时间延迟。它被定义为相位响应的负斜率:
\(\tau_g(\omega) = \frac{d \phi (\omega)}{d \omega}\) (9)
其中 \( \phi (\omega)\) 是以弧度为单位的相位。在共振时,相位变化迅速,因此我们预期在共振时群延迟信号中会出现一个峰值,从而得到共振频率和 \(\tau_g\)。鉴于
\(\phi (\omega) = \arg{(T(j\omega))} = \arg{\left( \frac{\omega^2_n}{\omega^2_n – \omega^2 + j 2 \zeta \omega_n \omega} \right) } = -\arctan{\left( \frac{\omega_n \omega}{Q(\omega_n^2 – \omega^2)}\right)}\) (10)
在共振频率处,可以通过数学证明,共振时的群延迟等于阻尼比的倒数乘以固有频率:
\(\tau_g(\omega) = -\frac{d \phi(\omega)}{d \omega} = \frac{1}{1+\left( \frac{\omega_n \omega}{Q(\omega_n^2 – \omega^2)}\right)}\left( \frac{\omega_n}{Q(\omega_n^2 – \omega^2)} + \frac{2 Q \omega_n \omega^2}{Q^2(\omega_n^2 – \omega^2)^2} \right)\)
\(= \frac{Q \omega_n (\omega_n^2 + \omega^2)}{Q^2(\omega_n^2 – \omega^2)^2 + \omega^2_n \omega^2}\)
\(\tau_g(\omega_n) = \frac{1}{\zeta \omega_n}\) (11)
为了找到使传递函数 \(T(j \omega)\) 的幅值的分母 \(D\) 最小的频率 \(\omega_{res}\),我们对 \(D\) 求导并令其为零:
\(|T(\omega)|^2 = \frac{\omega_n^4}{(\omega_n^2 – \omega^2)^2 + 4 \zeta^2 \omega_n^2 \omega^2}\) (12)
当 \(\omega = \omega_{res}\) 时,\(\frac{dD}{d \omega} = \frac{d}{d \omega}[(\omega_n^2 – \omega^2)^2 + 4 \zeta^2 \omega_n^2 \omega^2] = 0\) (13)
当 \(\zeta \ll 1\) 时,\(\omega_{res} = \omega_n \sqrt{1-2 \zeta^2} \approx \omega_n\) (14)
将公式 8 代入公式 11,我们得到品质因数、群延迟和谐振频率之间的直接关系:
\(Q = frac{|\tau_g(\omega_{res}) \ times \omega_n|}{2} = |\tau_g(f_{res}) \times f_{res} \times \pi|\) (15)
我们可以使用频率响应分析仪,根据增益和相位数据测量群延迟和谐振频率,从而计算 Q 值。为了计算相位裕度,我们使用公式 13 中的已知关系式 [1,公式 (6.31)]:
\(\phi_m = \arctan{\left( \frac{2 \zeta}{\sqrt{\sqrt{1+4 \zeta^4} -2 \zeta^2}} \right)}\) (16)
将公式 8 代入公式 16,我们可以根据 Q 计算相位裕度:
\(\phi_m = \arctan{\sqrt{\frac{1+\sqrt{1+4Q^2}}{2Q^4}}}\) (17)
利用稳压器测量输出阻抗的增益和相位图,我们可以使用公式 15 和 17 计算闭环系统的相位裕度。由于无需断开控制环路电路即可测量输出阻抗,因此可以进行非侵入式稳定性评估。
稳定性评估
控制系统的稳定性通常用增益裕度和相位裕度来表示。增益裕度是指在系统不稳定之前,增益可以增加或减少的幅度。在如图 2 所示的伯德图中,增益裕度是指幅度曲线与 0 dB 线(幅度 = 1)之间的垂直距离,该距离是在相位等于 -180° 的频率处测量的。
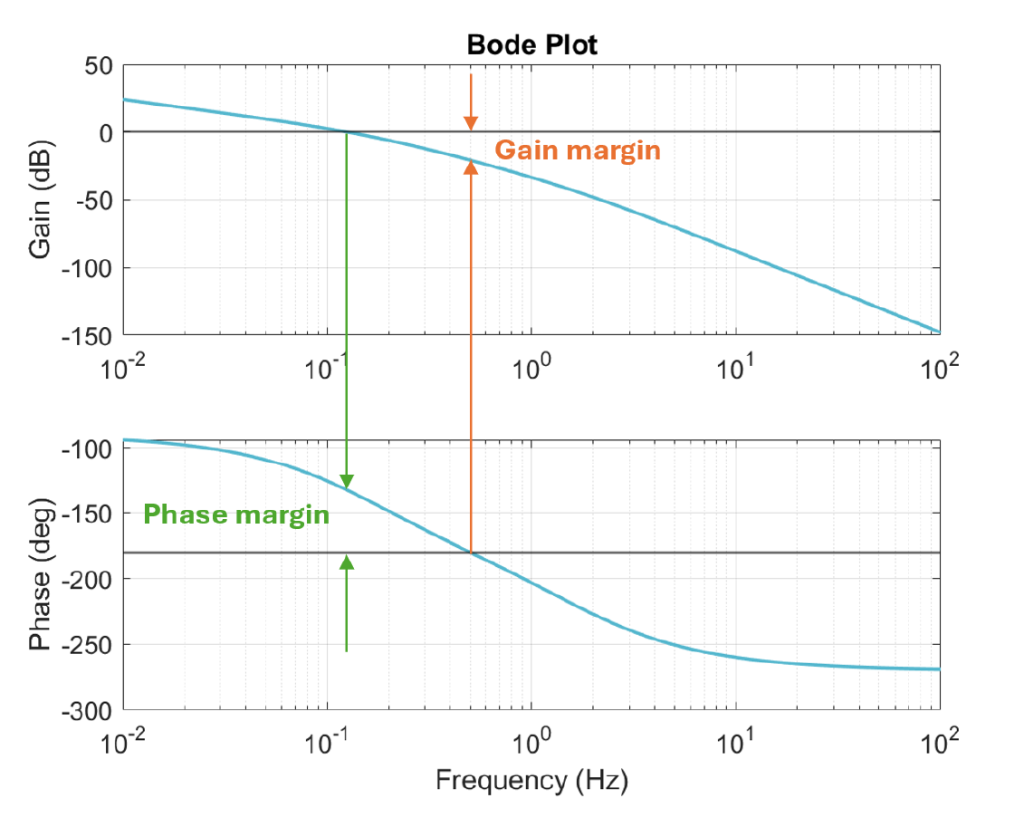
相位裕度表示系统在相位上距离不稳定点的远近。在伯德图中,它是相位曲线到相位值为 -180° 的垂直距离,对应的频率为:振幅等于 1(或 0 dB),也称为分频点(见图 2)。为了保证稳定性,相位裕度必须为正值。实际上,所需的相位裕度取决于系统设计,但通常认为保证足够稳定性的最小值约为 30°。一般来说,相位裕度越大,稳定性越高,但过大的相位裕度会降低响应速度,这可以通过观察分频点来进一步评估。
在诸如NISM等实际测量环境中,输出阻抗用于近似相位裕度,但无法提供增益裕度。相位裕度通常是稳定性评估的主要指标,因为它直接提供有关系统阻尼特性的信息,并能让我们充分了解瞬态性能——而瞬态性能最终是稳定性的关键标准。
实验装置
传统稳定性测量方法:
图 3 显示了用于进行传统稳定性测量的设备设置示意图。待测器件为 Picotest 公司的电压调节板 (VRTS 1.5)。该调节板由直流电源 (7VDC) 供电。板顶部有两个波特图注入点,分别连接到注入电阻上。Moku 频率响应分析仪向注入变压器 (Picotest J2101A) 发送交流信号,以在注入电阻上施加正弦扰动信号。频率响应分析仪的两个输入端分别连接到一个波特图注入点,对应于注入前后的响应。
稳压器板上有三个板载开关,分别控制两个 100 μF 电容和一个输出负载电阻。其中一个电容是铝电解电容,另一个是钽电容。由于电容材料不同,它们的等效串联电阻 (ESR) 差异显著。铝电解电容的 ESR 比钽电容高得多。在传统的稳定性测量中,输出负载电阻被启用,以实现 25 mA 的负载电流;而在 NISM 测量中,由于电流注入器本身就消耗 25 mA 的负载电流,因此输出负载电阻被禁用。测量时,每个电容分别连接,即启用一个电容,禁用另一个电容。这些测量分别针对传统的稳定性测量和非侵入式稳定性测量进行。
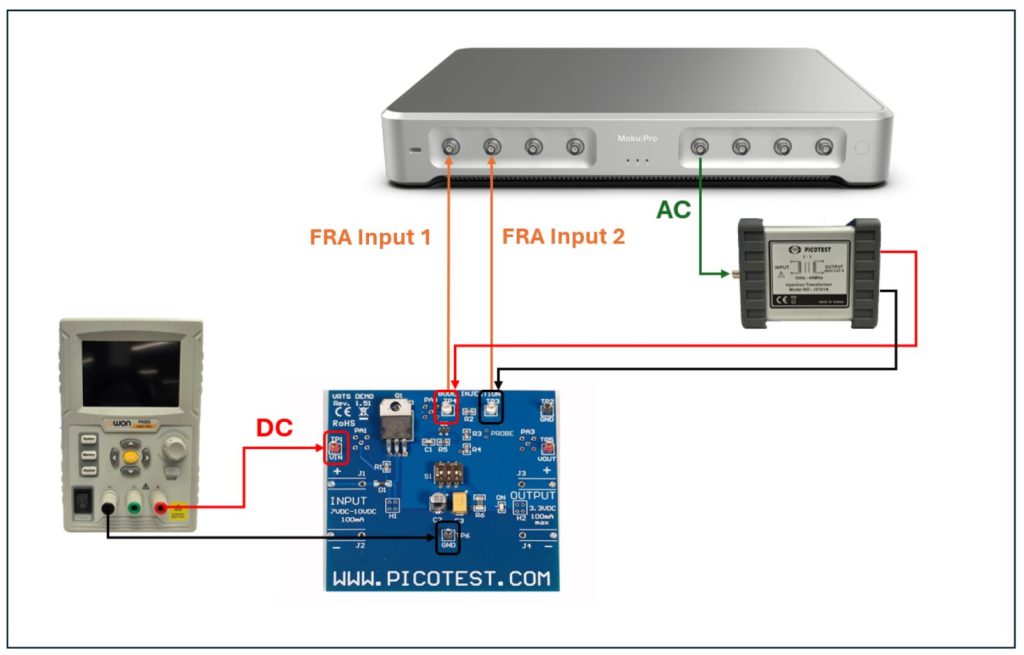
图 3:传统稳定性测量系统示意图。Picotest VRTS 1.5 稳压器板从直流电源输入 7V 直流电压。频率响应分析仪的交流信号从 Moku:Pro 的输出 1 输出,并进入注入变压器(Picotest J2101A)的输入端。注入变压器输出端的扰动信号被注入到稳压器板上的波特图注入点。Moku:Pro 的输入 1 和 2 分别连接到一个波特图注入点。
频率响应分析仪的设置如图 4 所示。输入 2 的信号除以输入 1 的信号,绘制注入电阻前后电压比值。当频率响应分析仪将扰动信号注入注入电阻时,它会绘制相同注入点的增益和相位数据。幅度设置为 -35 dBm,因为更高的幅度会导致稳压器产生非线性响应,并使增益和相位曲线失真。因此,逐渐降低注入信号的幅度,直到响应不再受幅度影响为止。
非侵入式稳定性测量
图 5 显示了用于进行非侵入式稳定性测量的设备设置示意图。所有设备均使用同一块稳压器板,并由同一直流电源 (7VDC) 供电。频率响应分析仪输出 1 的扰动信号被送至电流注入器 (Picotest J2111B) 的输入端,该注入器通过稳压适配器 (Picotest J2171A) 由标准墙壁插座电压 (120VAC) 供电。
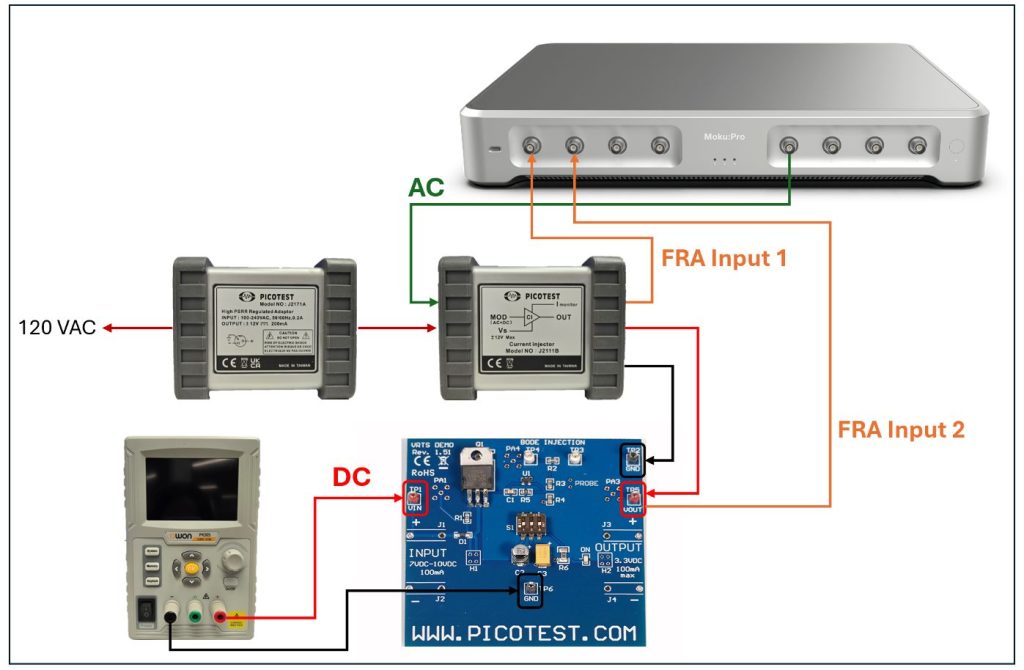
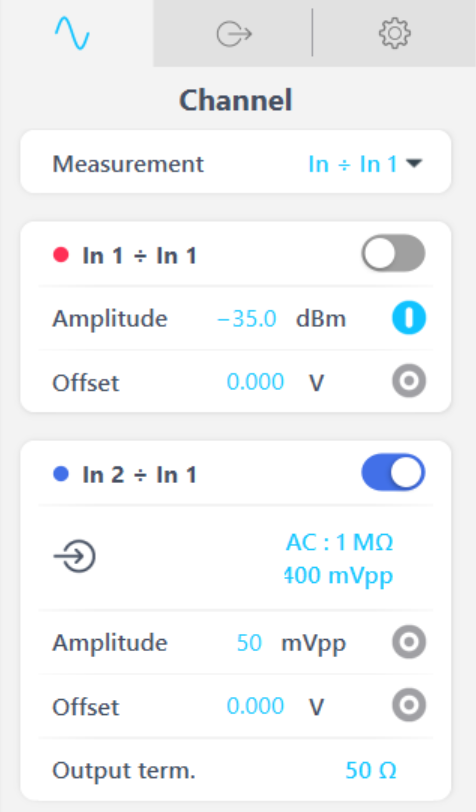
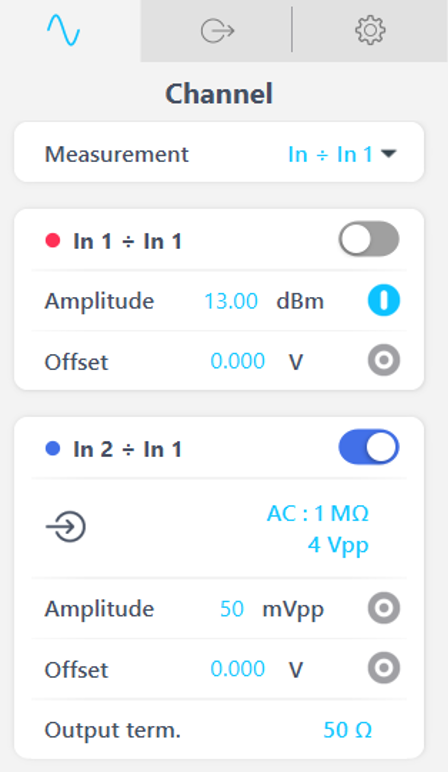
当前注入器的输出是扰动信号,该信号连接到稳压器板的输出端。稳压器的输出端也是阻抗测量点。阻抗的计算方法是将输出电压除以注入器输出端的电流。为了完成此测量,频率响应分析仪的输入1连接到电流端,输入2连接到稳压器输出电压端。下图6显示了用于测量稳压器输出阻抗的频率响应分析仪设置。由于需要足够大的扰动才能获得足够高的信噪比,从而能够通过群延迟准确检测谐振,因此NISM测量的幅度高于传统方法的幅度。
功能验证
图 7 和图 8 分别显示了启用钽电容和铝电解电容时,传统稳定性测量装置(如图 3 所示)的增益和相位图。每个图均从 Moku 应用的频率响应分析仪导出为 mat 文件,并在 MATLAB 中绘制。
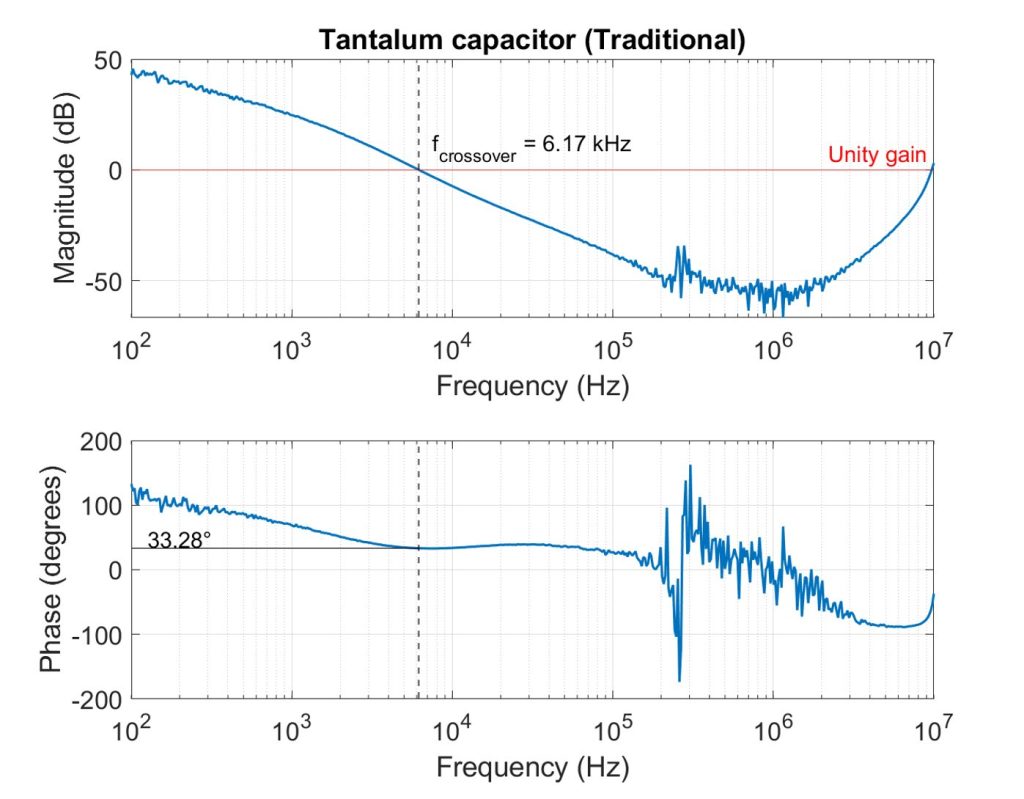
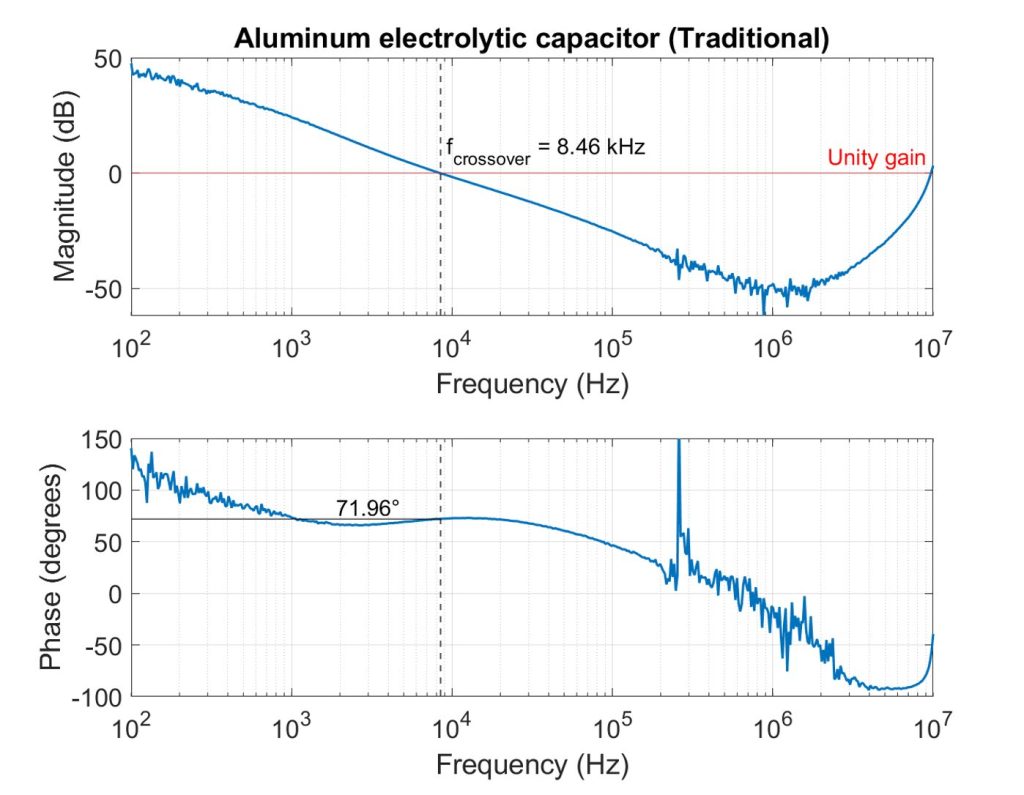
在每个图中,我们通过寻找幅度图中的交叉频率来确定相位裕度。该交叉频率是指幅度与单位增益值(0 dB)相交的频率。该交叉频率处的相位值即为相位裕度。
钽电容的交叉频率为 6.17 kHz,相应的相位裕度为 33.28°。铝电解电容的交叉频率更高,为 8.46 kHz,因此相位裕度也更高,达到 71.96°。铝电解电容较高的等效串联电阻 (ESR) 使 ESR 引起的零点向低频移动,从而在增益交叉点之前有效地增加了相位超前。这也降低了幅度响应的斜率,使得环路能够在更高的频率上实现单位增益。
图 9 和图 10 分别显示了启用钽电容和铝电解电容时控制回路的幅值响应和相位响应。这些测量采用图 5 所示的装置进行,且测量过程为非侵入式。
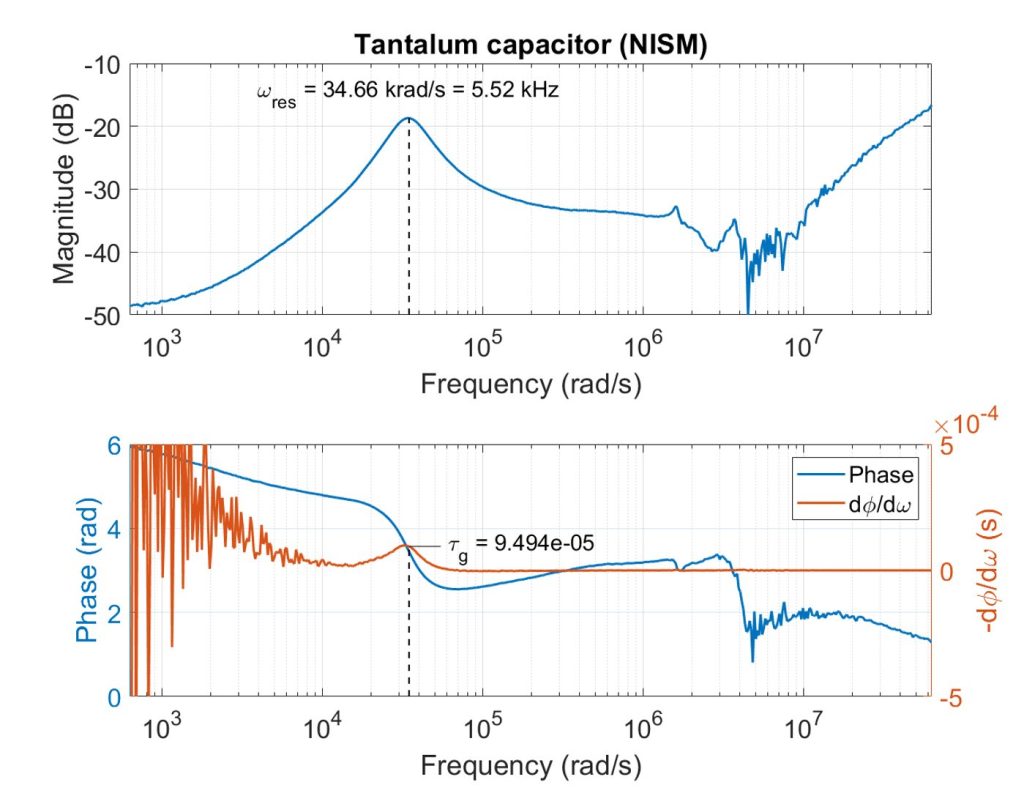
如图 9 所示,幅值图中在 5.52 kHz 处存在一个谐振峰。对于相位数据,群延迟是通过对相位角频率求负导数计算得到的,并绘制在相位数据图上。群延迟的峰值与谐振峰的频率相同,这符合预期,因为我们预期在谐振附近相位变化会更快。谐振时的群延迟为 94.94 微秒。利用谐振频率和谐振时的群延迟值,根据公式 15 计算出品质因数为 1.6454。将该品质因数代入公式 17,得到相位裕度约为 33.67°。
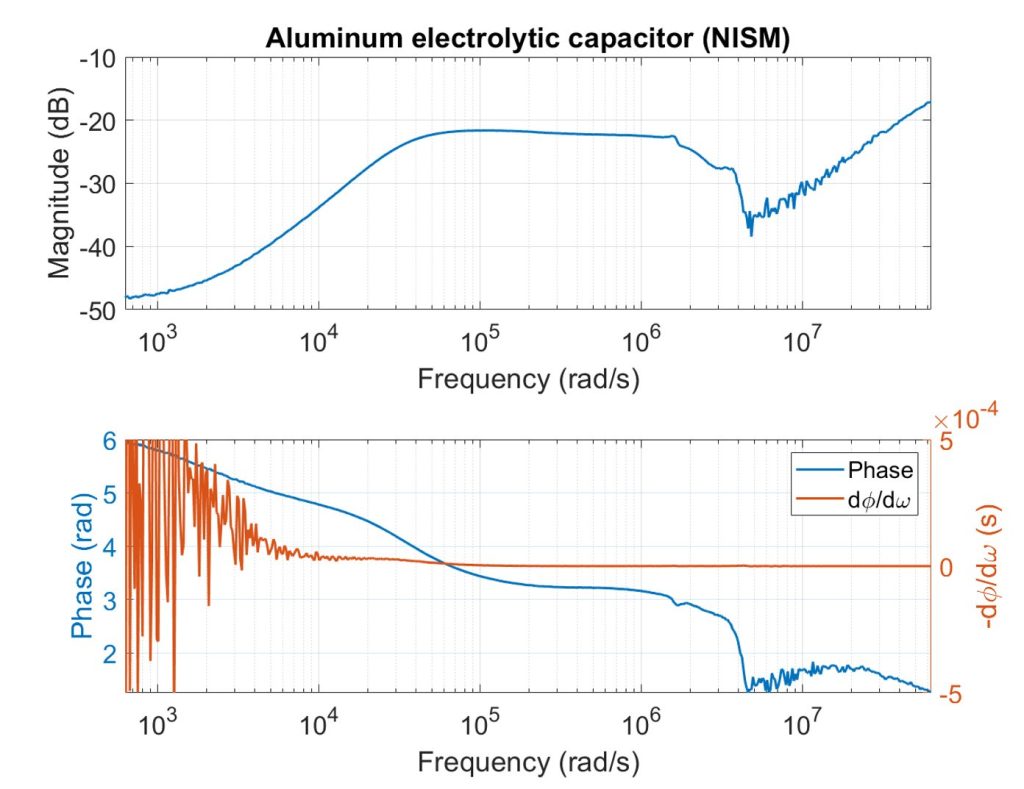
对于铝电解电容器,图 10 所示的幅值和群延迟曲线没有明显的谐振峰。这种情况表明系统阻尼良好(相位裕度大于 70°),因此是稳定的。做出此假设的原因是,相位裕度与阻尼比之间的关系(如公式 16 所示)在某一相位裕度值之前呈线性关系。该线性关系可以近似表示为:
\(\zeta \approx \frac{\phi_m}{100} \) (18)
当相位裕度达到临界阻尼边界时,该区域变为非线性,此时谐振峰消失。如果我们在频域中找到二阶传递函数(公式 12)幅值的局部最大值,即可得到公式 14。当该值设为 0 时,阻尼比为 0.707。该值对应的相位裕度约为 70°。因此,我们假设,如果没有谐振峰,则相位裕度大于约 70°,表明该回路阻尼良好且高度稳定。
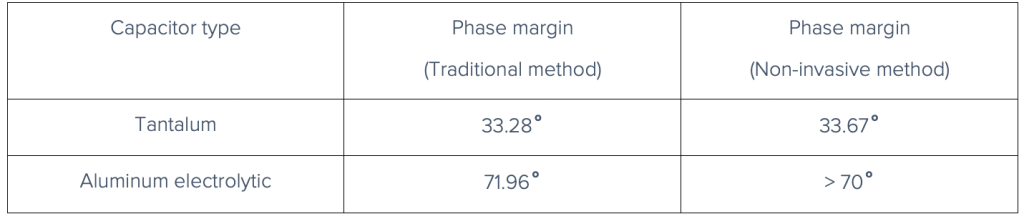
表1比较了各种稳定性测量方法测得的相位裕度值。总体而言,各方法测得的值吻合度很高。使用钽电容的NISM方法测得的相位裕度仅比传统稳定性测量方法高0.39°。由于NISM方法中铝电解电容没有明显的谐振峰,因此我们无法获得与传统方法测得的相位裕度进行比较的精确值。然而,根据谐振峰缺失推断出的相位裕度范围(>70°)与传统方法测得的71.96°相位裕度相符。
结语
NISM 是一种无需物理断开电路即可评估环路稳定性的有效方法。在本应用笔记中,我们使用 Moku:Pro 的频率响应分析仪,将传统稳定性测量方法得到的相位裕度结果与 NISM 方法得到的结果进行了比较,结果显示两者几乎完全一致。NISM 无需中断电路,而是利用电路的输出阻抗来确定谐振时的 Q 值(基于群延迟峰值),并利用这种关系可靠地估算相位裕度。
我们进一步评估了不同ESR值电容器对稳压器电路板的影响。结果表明,较高的ESR值会导致相位裕度增大,这是由于阻抗斜率变缓,从而导致增益频率交叉点发生偏移。
总体而言,NISM 被证明是一种可靠、高效且无干扰的控制回路稳定性分析技术。避免侵入式测量的便利性使其成为电力电子设计验证和故障排除的宝贵工具。然而,它也存在一些局限性。NISM 只能在有限的相位裕度范围内提供可靠的回路稳定性估计。虽然传统方法需要断开控制回路,但它能够进行更全面的稳定性评估,而 NISM 无法做到这一点。因此,对于需要分析更大相位裕度的系统,传统方法更为适用。NISM 特别适用于相位裕度较小的系统,以及在不方便或不宜断开回路的环境中。
案例
[1] GF Franklin、JD Powell 和 A. Emami-Naeini,《动态系统的反馈控制》,第 8 版,全球版。Pearson,2019 年。