



4.1 引言
环路的所有属性均由其开环传递函数 (OLTF) 决定,标记为 G, 我们必须修改这个量才能实现所需的性能目标。然而,被控对象和传感器的传递函数通常是固定的,唯一可用的自由度存在于控制器中。因此,我们调整控制器传递函数 C,以修改 OLTF。这种类型的频域调谐通常称为 循环整形.
部分1 建立传递函数的定义,并提供了构建控制回路框图以对复杂系统进行建模所需的组件。在 部分2 我们演示了如何使用反馈控制系统来抑制干扰或跟踪过程设定点。还讨论了与噪声传感器相关的复杂性。与开环系统不同,受反馈控制的设备有可能变得不稳定,并且性能和稳健性之间存在矛盾。最终,信号传播的延迟可能会施加最严格的限制。这些问题在 部分3。在频域中,反馈系统的大多数参数都可以与其开环传递函数相关联。在第 4 部分中,我们将解释如何测量这个重要量,并提供一个经常用于塑造它的函数列表。 部分5 描述了一种避免执行器饱和的方法,并在此过程中引入了对处理多个执行器有用的思想。我们的系列文章以对 PID 控制器的研究结束。这种常见的控制架构通常从时域的角度来考虑;我们说明了互补的频域表示。
4.2 设计原则
根据前几部分的讨论 本系列,设计规则如下:
- 制作 |G| 尽可能大,以抑制干扰并很好地跟踪设定点(参见(2.1))
- 制作 |G| 尽可能小,以免传感器噪声破坏我们的测量结果(参见(2.2))
- 同时保持良好的稳定性/稳健性(见 §3.2)
OLTF 的斜率与其相位之间的关系使得这项任务更加复杂
\(|G| sim f_n 右箭头角 G sim n 乘以 90^{circ}\)。
为了实现高增益,我们必须有陡峭的斜率,这会夺走环路的相位并将其推向不稳定。
找到一个有效的环路似乎是一项不可能完成的任务,直到人们意识到这些相互竞争的要求通常适用于不同的频带。干扰在低频时最大,稳定性仅由单位增益周围的行为定义,传感器噪声在较高频率时通常占主导地位。
因此,我们从基本元素构建一个控制器(参见 §A)以实现低频高增益、UGF可接受的相位裕度以及高频低增益(参见图 3.1).
回路整形是一个迭代过程。第一个回路仅用于实现基本的闭环控制,并实现系统特性和模型验证(见 §4.3)。自由运行噪声或设备/传感器传递函数可能未知或无法开环测量。从这一点开始,可以量化自由运行(通过“消除”测量环路的影响)和闭环输出。然后,可以讨论要求的可行性,并开始在存在延迟、共振、饱和等实际影响的情况下优化环路。
通过实践和经验,调谐环路将成为第二天性,其中包括增加增益以减少噪音、添加补偿器以恢复几度的相位、凹陷共振等技术。
4.3 测量 OLTF

图 4.1:利用前馈对抗输出干扰。
可以使用频率响应分析仪通过实验测量开环传递函数。如果系统允许,这种测量可以在开环的情况下真正进行,只需将组件串联并测量响应即可。更常见的是,只能在所需工作点附近探测代表性动态,即在闭环控制下使用系统。
幸运的是,我们可以通过环路闭合时的测量来测量 OLTF。在环路的任意一点引入加法器,就可以注入激励信号 X_{exc}。 加法器两侧信号的比例,
\(X_A = frac{1}{1+HCS}X_{exc}\)和
\(X_A = frac{1}{1+HCS}X_{exc}\),
给出 OLTF 的负数,
\(X_A/X_B = -HCS\),
这里我们忽略了与 \(X_{sp}\) 相关的 DC 项 因为我们只对 \(X_{exc}\) 的 AC 响应感兴趣。实际上,这些术语在相干检测过程中不会存在 频率响应分析仪.
一般来说,比率 \(X_A/X_B\) 是直接测量的,而不是结合两个独立的测量。这样,由于动态范围限制,在低频和高频下很难实现良好的 SNR(见图 4.2)通常,仅围绕单位增益来测量环路,并使用所得数据来锚定分析模型。
首次闭合回路以进行 OLTF 测量可能很困难。最有效的方法是使用各个组件的假设、测量或指定传递函数构建模型。从系统的这种近似描述可以实现基本功能回路。
4.3.1 使用 Moku 进行 OLTF 测量
Moku 频率响应分析仪 可用于测量 多仪器并行模式 与 PID 控制器 仪器被用作加法器(见图 4.3)。频率响应分析仪应在 In÷Out 模式下使用,为两个输出通道设置相等的幅度(即使只使用一个输出)。数学通道的输出公式为 -B / A 给出了期望的结果。
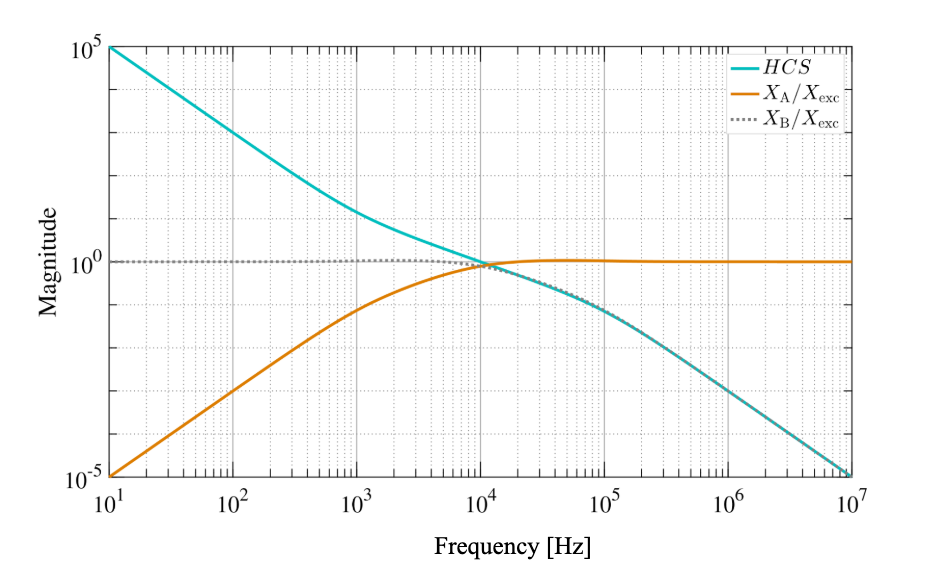
图 4.2:\(X_A/X_{exc}\) 的大小 和 \(X_B/X_{esc}\) 对于典型的开环传递函数 HCS。在高频和低频下,同时对两个量进行高保真测量可能具有挑战性,因为它们的响应相差几个数量级。因此,开环传递函数测量通常仅在单位增益附近进行。
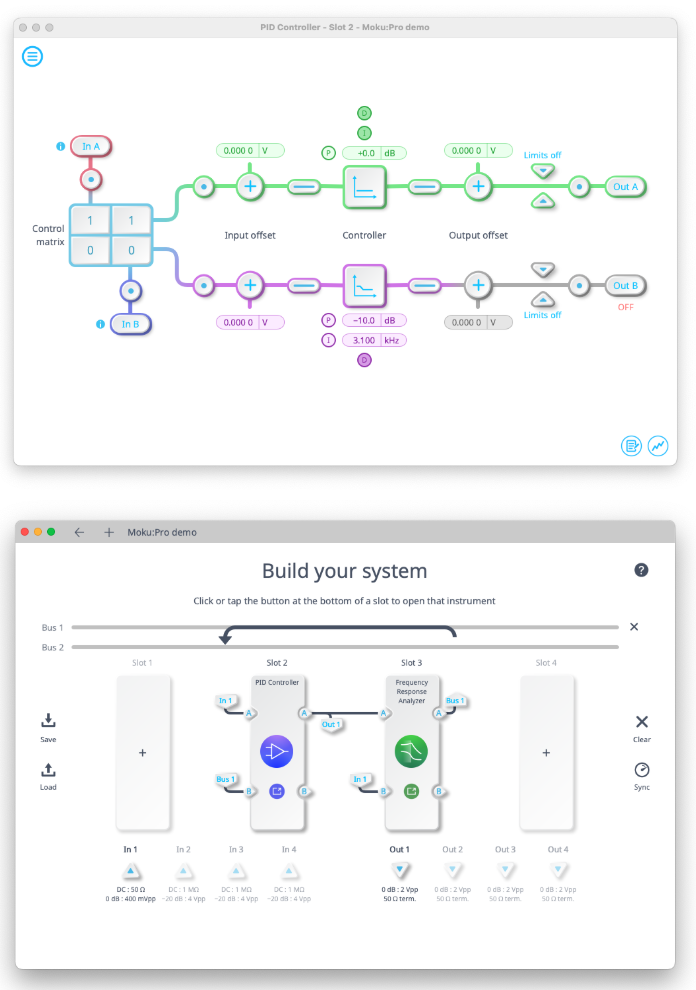
图 4.3:Moku 的 多仪器并行模式 使用频率响应分析仪和 PID 控制器仪器测量系统的开环传递函数。如上所示配置,PID 控制器充当加法器的角色,允许注入激励信号。一个简单的求和节点也可以使用 Moku 云编译.
4.4 结语
优化环路形状通常是创建反馈控制系统最耗时的阶段。但是,在良好模型和使用上述流程进行的 OLTF 测量的指导下,我们无需盲目操作。使用附录 A 中详述的一组基本函数来实现设计原则(在噪声频率下增益高;在其他地方增益低,始终关注稳定性)是一种行之有效的成功策略。
接下来,在 部分5我们将考虑如何管理一个在短时间内工作但在执行器饱和时失去锁的循环。
附录A: 有用的表达
我们在此介绍一系列表达式,读者在建模系统或设计控制器传递函数时可能会发现它们很有用。这些表达式已进行评估,并绘制在图中 4.4. 这里,\(omega_0\) 以角度单位描述转角频率或中心频率。无量纲量 Q 与滤波器的半峰全宽 (FWHM) 带宽 ∆ 相关,通过 \(Q = omega_0 / Delta\).
我们还注意到方程的解
\(s^2 + 左(omega_0 / Q右)s + omega_0^2 = 0\)
旨在
\(s = -frac{omega_0}{2Q} pm i omega_0 sqrt{1- 左(frac{1}{2Q} 右)^2}\)。
- 极点和零点
\(H_p(s)= frac{1}{1+s/omega_0}\)
\(H_z(s)= 1 + s / omega_0 \)
- 复极点和零点(二阶)
\(H_p(s)= frac{omega_0^2}{s^2 + left(omega_0 / Qright)s + omega_0^2}\)
\(H_z(s)= frac{s^2 + left(omega_0 / Qright)s + omega_0^2}{omega_0^2}\)
- 陷波/谐振增益
\(H_{notch/res}(s) = frac{s^2 + left(omega_0 / Q_zright)s + omega_0^2}{s^2 + left(omega_0 / Q_pright)s + omega_0^2}\)
滤波器在 \(omega_0\) 处的增益或衰减 由 \(Q_p/Q_z\) 给出 以及 Q 大约是 \(Q_p\).
- 高通
\(H_{hp}(s) = frac{s^2}{s^2 + left(omega_0 / Qright)s + omega_0^2}\)
- 带通
\(H_ {bp}(s)= frac{left(omega_0 / Qright)s}{s ^ 2 + left(omega_0 / Qright)s + omega_0 ^ 2} \)
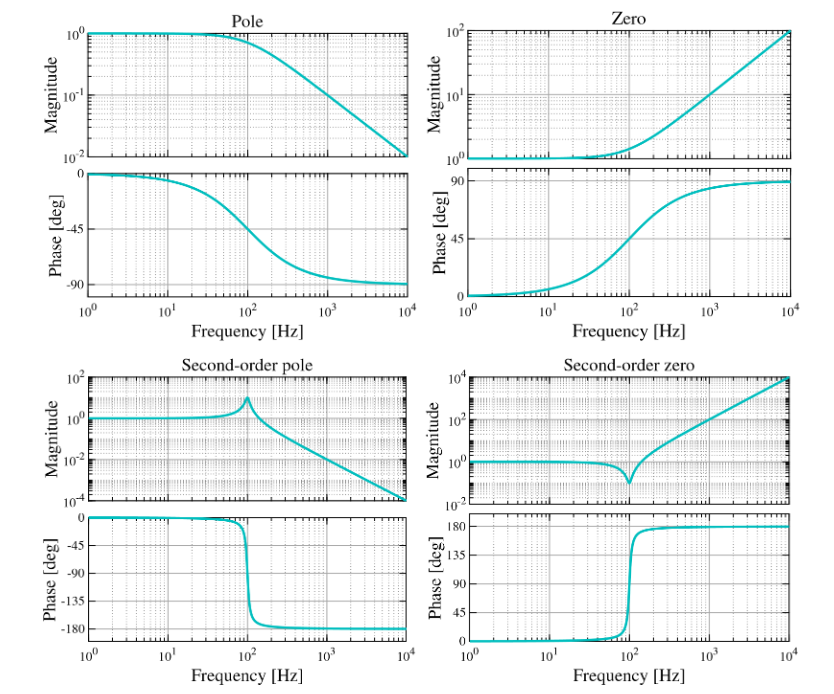
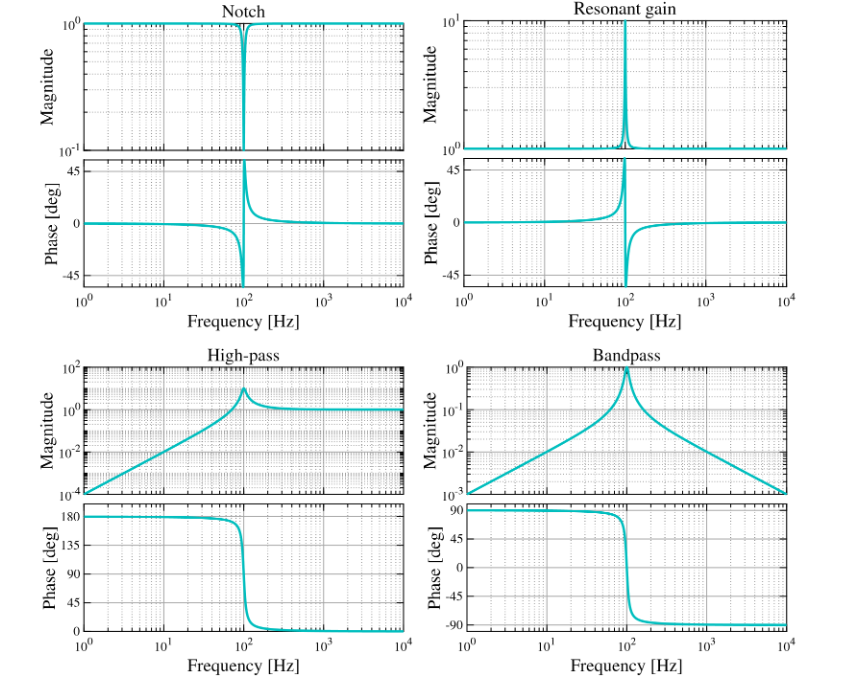
图 4.4:上面详细绘制的任意选择参数的“有用表达式”(\(omega_0\) =100赫兹, Q = 10,增益/衰减= 10)来显示它们的函数形式。

