



5.1 引言
经常发生的情况是,一个环路可以闭合,并且所需的性能可以实现,但控制会在很短的一段时间后丢失。这种情况的常见罪魁祸首是执行器饱和。在这些情况下,执行器“足够快”以减轻干扰的最高频率元素,但它没有足够的绝对范围来应对其最低频率分量。
例如,当将激光器锁定到腔体时,激光器的 压电马达 (PZT) 最初能够使激光保持谐振。然而,环境热效应会导致腔体长度随时间增加。因此,PZT 控制信号的“DC”分量单调增加,直到电子设备或 PZT 本身“导轨”和锁定丢失。在我们关于频域控制的系列文章的这一部分中,我们将考虑如何通过添加第二个执行器来解决这个问题。
部分1 建立传递函数的定义,并提供了构建控制回路框图以对复杂系统进行建模所需的组件。在 部分2 我们演示了如何使用反馈控制系统来抑制干扰或跟踪过程设定点。还讨论了与噪声传感器相关的复杂性。与开环系统不同,受反馈控制的设备有可能变得不稳定,并且性能和稳健性之间存在矛盾。最终,信号传播的延迟可能会施加最严格的限制。这些问题在 部分3在频域中,反馈系统的大多数参数都可以与其开环传递函数联系起来。 部分4 我们将解释如何测量这个重要的量,并提供一个经常用于塑造它的函数列表。第 5 部分将介绍一种避免执行器饱和的方法,并在此过程中介绍一些对处理多个执行器有用的想法。我们的系列文章最后 部分6 随着研究 PID控制器。这种常见的控制架构通常从时域的角度来考虑;我们说明了互补的频域表示。
5.2 附加执行器
在这种情况下,显而易见的选择是用提供更大范围的执行器替换饱和执行器。通常,这种策略会失败,因为增加范围会导致速度相应降低。然而,这一知识指向了另一种解决方案:我们可以用第二个提供更大范围的执行器来增强系统,虽然速度较慢,但能够抵消最低频率的干扰。
该方法如图所示 5.1.最上面的图表代表 初始回路中只有快速执行器,传递函数为 \(H_F\),包括在内。快速控制器和系统传感器具有传递函数 F 以及 S。此环路稳定,且具有 OLTF \(SFH_F\).
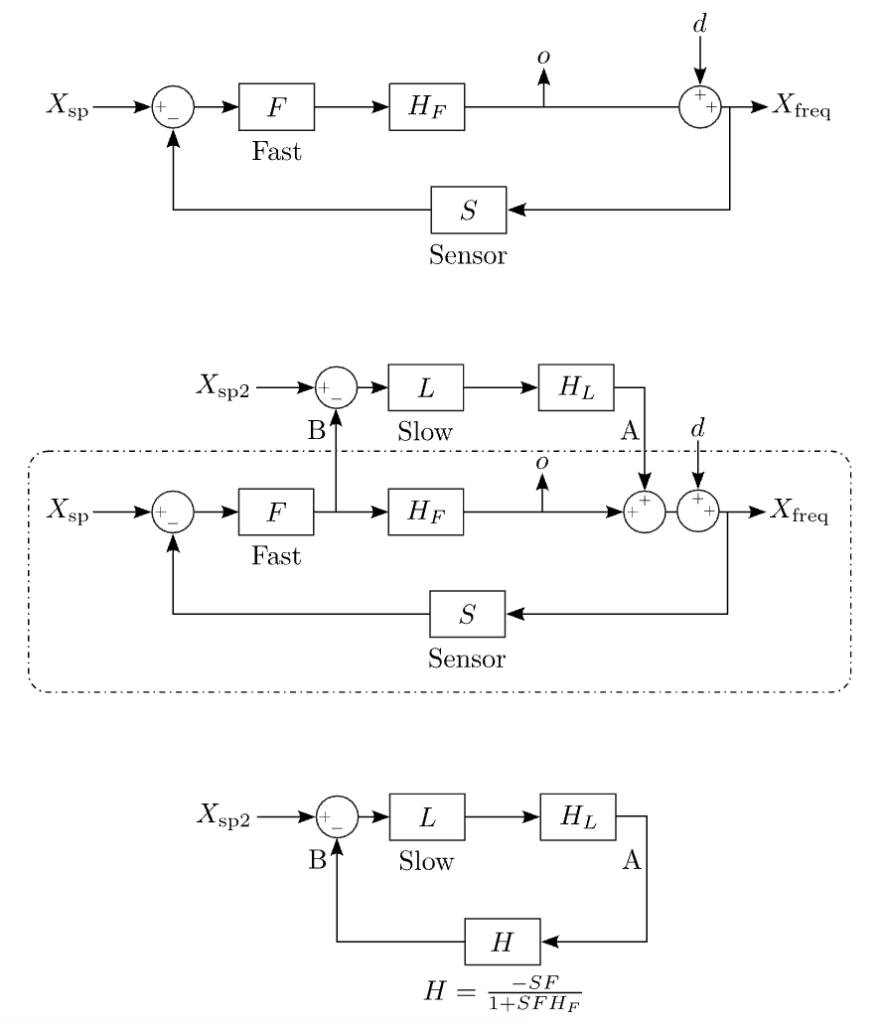
图 5.1:顶部:初始“快速回路”。中间:快速回路增加慢速回路以避免饱和。底部:将快速回路视为被控对象的等效回路。
中间的图表描述了同一个系统,但增加了慢速执行器(传递函数 \(H_L\))和慢速控制器(传递函数 L)。这条新路径将快速执行器的控制信号作为输入。我们的目标是降低该信号以避免饱和。
5.3 观点的改变
为了确定我们添加的新路径的稳定性和性能,我们必须改变我们的观点。由于快速循环本身是稳定的,我们将其视为 配置 寻找新的道路。
利用上面概述的技术,我们计算点之间的传递函数 A 以及 B 并将快速系统压缩为单个块,如图最下面的图所示 5.1所述传递函数由下式给出:
\(H = frac{-SF}{1+SFH_F}\)
我们的新“慢速”循环的 OLTF 是
\(G = 压裂{LH_L}{H_F}压裂{-SFH_F}{1+SFH_F}\)。
相对于初始快速循环,慢速循环必然具有较低的 UGF。低于快速循环的 UGF \(-SFH_F/(1+SFH_F) sim -1\)。因此,在慢循环感兴趣的频率下,
\(G sim -frac{LH_L}{H_F}\),
该表达式可以正常用于确定慢速循环的性能和稳定性,但需要注意的是 L 通常需要负增益来适应负反馈环路的相位 H.
5.4 去饱和
回想一下,慢速回路的最初目标是减少快速执行器的控制负担。考虑到这一点,我们检查输出 o 快速执行器对频率扰动的响应 d (见图 5.1).
当原始快速路径单独起作用时,我们发现
\(o = frac{-SFH_F}{1+SFH_F}d sim – d\),
广义上讲,在快速环路带宽内,快速执行器产生扰动的反转,使得输出保持不受干扰。
加上慢速路径,我们有
\(o = frac{-SFH_F}{1+SFH_F-SFLH_L}d sim – frac{d}{G}\),
其中近似值在慢速环路带宽内有效。因此,在慢速环路处于活动状态的频率下,快速路径输出会降低 G,即慢速环路的增益。如果此减小的输出落在快速执行器的有用范围内,则可以避免饱和,并且可以在较长的时间范围内实现闭环操作。
Moku 激光锁频/稳频器 使用上面描述的架构实现快速和慢速路径,允许用户轻松部署执行器去饱和技术(见图 5.2).
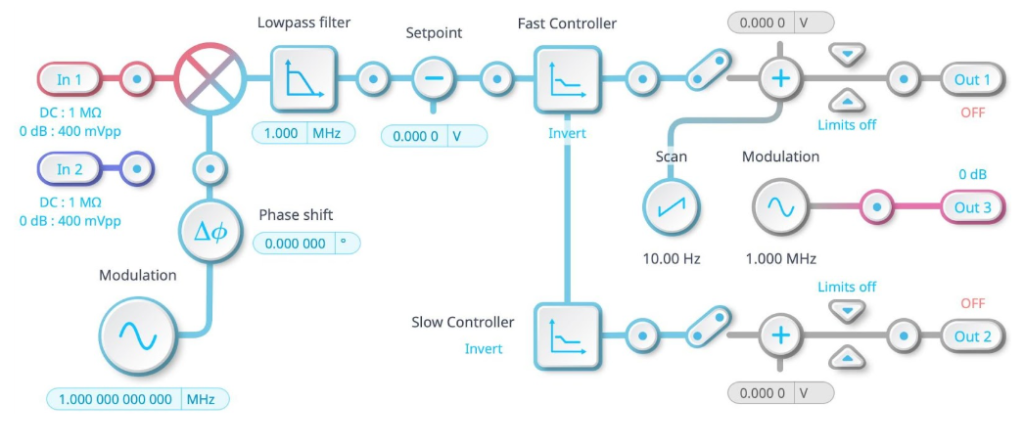
图 5.2:Moku 激光锁频/稳频器 包括快速和慢速反馈路径。快速控制器的输出被路由到慢速控制器的输入。这种架构可以避免快速路径的饱和。
5.5 结语
上文中我们展示了两个执行器的组合如何在不同频带上提供有用的性能,从而缓解执行器饱和问题。关键思想是我们在前面部分介绍的数学处理是灵活的;我们可以改变我们的观点,将整个反馈回路视为更简单的控制系统图中的另一个块。此概念可应用于我们试图通过添加更快的执行器来增加带宽的情况,或者我们有多个执行器并行运行的情况,而不是我们研究的级联架构。新的、更简单的图表还使我们能够使用预先存在的工具轻松研究复合配置的稳定性。

