



6.1 引言
PID控制器 在许多设备中都有使用,包括 Moku 系列产品. Moku 提供独立的 PID 控制器以及集成的PID控制器作为其 激光锁频/稳频器 以及 锁相放大器. 本系列的最后一部分介绍了 Moku PID 框架的两个等效频域模型,允许用户在外部软件中对其控制回路进行建模。
部分1 建立传递函数的定义,并提供了构建控制回路框图以对复杂系统进行建模所需的组件。在 部分2 我们演示了如何使用反馈控制系统来抑制干扰或跟踪过程设定点。还讨论了与噪声传感器相关的复杂性。与开环系统不同,受反馈控制的设备有可能变得不稳定,并且性能和稳健性之间存在矛盾。最终,信号传播的延迟可能会施加最严格的限制。这些问题在 部分3在频域中,反馈系统的大多数参数都可以与其开环传递函数联系起来。 部分4 我们解释了如何测量这个重要数量,并提供了塑造它时经常使用的函数列表。 部分5 描述了一种避免执行器饱和的方法,并在此过程中介绍了对处理多个执行器有用的思想。我们的系列文章在第 6 部分以对 PID 控制器的研究结束。这种常见的控制架构通常从时域的角度来考虑;我们说明了互补的频域表示。
6.2 转换功能
PID 控制器的输出可以描述为独立路径(比例、积分、双积分和微分)的加权和。这产生了传递函数 H(s),形式为
\(P + frac{K_I}{s} + frac{K_{I+}}{s^2} + K_Ds\)
或包括饱和项,
\(H(s)= P + frac{K_I}{s} frac{s}{(s-p_{IS})} + frac{K_{I+}}{s^2} frac{s^2}{(s-p_{IS})^2} + K_Ds frac{-p_{DS}}{(s-p_{DS})}\)
\(= P + frac{K_I}{(s-p_{IS})} + frac{K_{I+}}{(s-p_{IS})^2} + K_Dsfrac{-p_{DS}}{(s-p_{DS})}\) (6.1)
频率响应可以通过代入该表达式得到 s = iω,在 Moku:Pro 上 i 是虚数单位, ω 角频率。可以通过消除不必要的项来对可用特征的子集进行建模。
表 6.1 描述了模型参数与提供给我们的仪器的值之间的关系。
表 6.1:模型参数。表格的第一部分列出了 Moku 仪器软件中配置的参数;后面是派生参数。
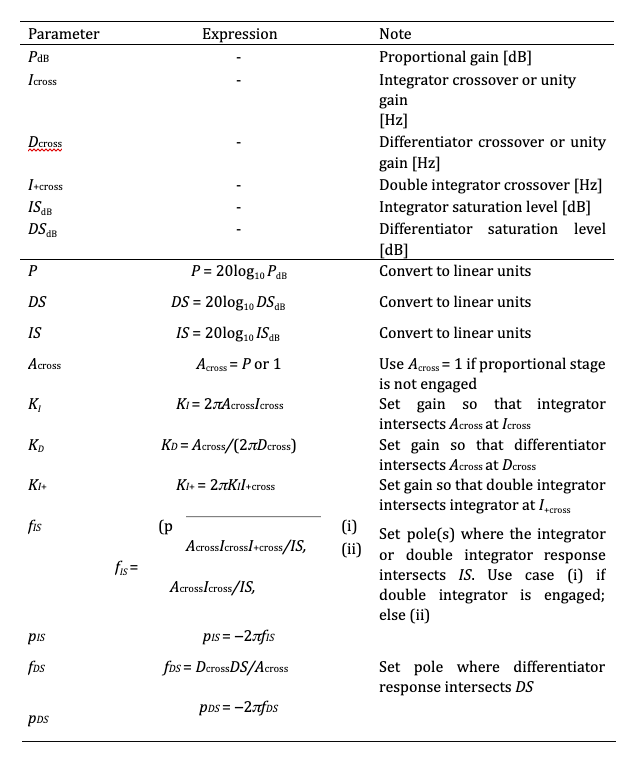
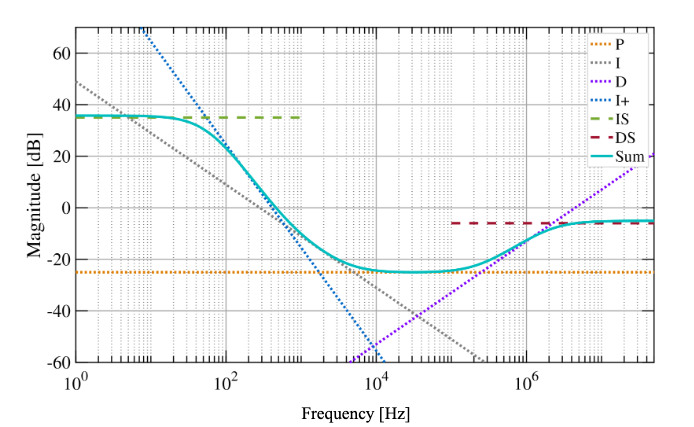
图 6.1:所有启用阶段的总和(虚线)给出了总体控制器响应(实线)。积分器和微分器的饱和度用虚线表示。用户定义的参数定义了各种贡献的相对大小。
图 6.1 说明了总响应如何由各贡献路径的总和给出。
6.3 零点、极点、增益
另一种方法是用零点、极点和总增益来描述响应,即
\(H(s)= K frac{(s-z_1)(s-z_2)ldots(s-z_N)}{(s-p_1)(s-p_2)ldots(s-p_N)}.\)(6.2)
这种描述可以通过对方程(6.1)的展开和简化来实现。在一般情况下,我们发现
\(H(s)=(P-K_Dp_{DS})frac{(s-z_1)(s-z_2)(s-z_3)}{(s-p_{IS})^2(s-p_{DS})},\)(6.3)
其中零点由方程的根给出
\((P-K_Dp_{DS})s^3+\)
\((2K_Dp_{IS}p_{DS} + K_I – Pp_{DS} – 2Pp_{IS})s^2+ % s^2\)
\((-K_Dp_{IS}^2p_{DS} – K_Ip_{DS} – K_Ip_{IS} + K_{IP} + 2Pp_{DS}p_{IS} + Pp_{IS}^2)s+\)
\((K_Ip_{DS}p_{IS} – K_{IP}p_{DS} – Pp_{DS}p_{IS}^2)=0。\)(6.4)
由于分析方法有些笨重,我们用数值方法求解该方程。
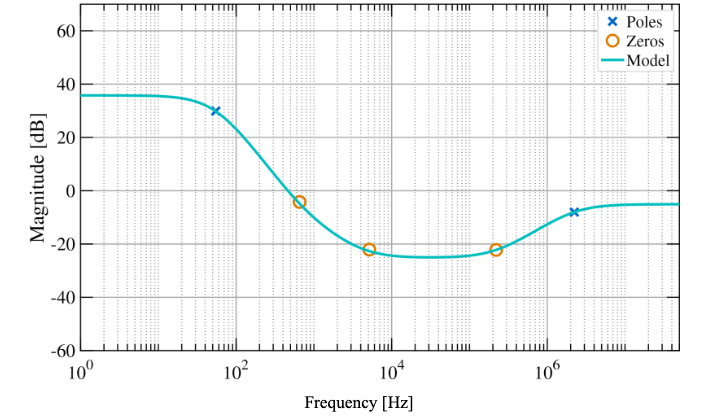
图 6.2:控制器响应,标出了极点和零点的频率。注意,50 Hz 附近的极点的重数为 2。
图 6.2 演示了如何用极点和零点而不是总和路径来表征图 6.1 中所示的响应。
6.4 与测量数据的比较
图 6.3 将我们的模型与使用 激光锁频/稳频器 的 Moku:Pro. 在感兴趣的频率范围内观察到了可接受的一致性。
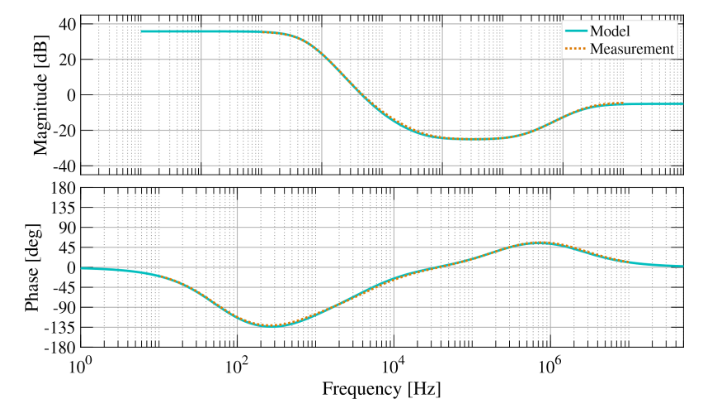
图 6.3:模型与测量数据的比较。结果发现,最差情况下,一致性在 1 dB/3° 以内(如图所示),通常情况下,一致性会好一个数量级。
6.5 更准确的模型
由于数值原因, PID控制器 并不像上面所阐述的那样(参见(6.1))作为项的纯粹和来实现,而是作为形式为(P+I+D)×(P+I),在 Moku:Pro 上 P、我 以及 D 对应于比例、积分和微分项。除了产生双积分器 我×我 我们还意识到另外两个必须添加到我们的模型中的交叉项,通过
\(H^{prime}(s) = frac{1}{P}timesleft(P + frac{K_I}{(s-p_{IS})} + K_Dsfrac{-p_{DS}}{(s-p_{DS})}right)timesleft(P + frac{P}{K_I}frac{K_{I+}}{(s-p_{IS})}right)\)
\(= H(s)+ Pfrac {K_ {I +} / K_I}{(s-p_ {IS})} + K_Dsfrac {-p_ {ds} {(s-p_ {DS})}frac {K_ {I +} / K_I}{(s-p_ {IS})}。)
就我们的极点-零点-增益模型而言,只需要修改零点。我们在(6.4)的左侧添加以下项
\((PK_ {I +} / K_I – K_Dp_ {DS} K_ {I +} / K_I)s ^ 2 + \%s ^ 2 \)
\((K_Dp_{DS}p_IK_{I+}/K_I – Pp_{DS}K_{I+}/K_I – Pp_IK_{I+}/K_I)s+\)
\((Pp_{DS}p_{I}K_{I+}/K_I)\)
附加条款仅在以下情况下有效: I+ 双积分器阶段已启动,并且在典型模型所需的精度水平下通常无关紧要。
6.6总结与结论
在本系列文章中,我们介绍了 PID 控制器 在发现 Moku 仪器。通常通过其时域行为进行描述,此示例很好地突出了两个域的互补性。该模型旨在在浮点软件中实现(MATLAB, Python 等)来帮助用户设计和分析他们的实验。该模型与测量数据非常吻合。然而,在需要最高精度的情况下,我们建议直接使用我们的 频率响应分析仪.
在整个本系列中,我们提供了频域控制的基本基础。从传递函数的定义开始,我们使用框图构建了反馈控制回路,并演示了信号在稳定状态下如何在回路中传播。这项工作引发了干扰抑制、设定点跟踪和稳定性等想法。最后,我们简要讨论了在形成开环传递函数时这些概念之间的相互作用。在整个工作过程中,我们一直努力将数学细节保持在最低限度,特别是在与稳定性有关的问题上。寻求更详细和更严谨的读者将可以从下面引用的文献中受益。
案例
A. Abramovici 和 J. Chapsky, 反馈控制系统. 荷兰多德雷赫特:Springer,2000 年 XNUMX 月。
K. Ogata, 现代控制工程,第 5 版。新泽西州 Upper Saddle River:Pearson,2009 年 XNUMX 月。

