



抽象
In 部分1,我们引入了双频共振跟踪 (DFRT) 技术,作为现有共振跟踪技术(例如锁相环 (PLL))的替代方案。某些谐振器在共振时会出现突变相移,这使得 PLL 并非此类任务的最佳选择。共振跟踪正变得越来越重要,尤其是对于像压电响应力显微镜 (PFM) 这样的系统而言,它们依靠精确的共振跟踪来驱动悬臂以提取最清晰的图像。微机电系统 (MEMS) 是另一种需要精确共振跟踪来验证制造工艺并优化性能的系统。
在第2部分中,我们将在晶体谐振器上测试DFRT方法。该谐振器谐振频率的变化量约为数百赫兹,典型频率稳定性为标称频率±50 ppm(百万分率)。加热晶体会导致谐振频率发生偏移,而DFRT方法可以有效地测量这种偏移。
MEMS 设备(例如 MEMS 陀螺仪)依靠精确的谐振跟踪来确保高效的功耗。这类设备依赖于旋转的振荡质量块,并利用由此产生的科里奥利力来确定角运动。为了确保低功耗,这些质量块以其谐振频率驱动,因此必须跟踪这种谐振及其由此产生的变化。
引言
随着新技术在其设计中充分利用晶体谐振器的功能,精确的谐振跟踪变得越来越重要。在某些设计中,环境因素,尤其是热量,会影响晶体。晶体谐振器受热会导致谐振峰值发生偏移,因此,对于某些应用而言,能够有效快速地跟踪这些变化至关重要。传统的谐振跟踪方法(例如锁相环 (PLL))适用于大多数应用,但在某些条件下会失效。PLL 依赖于谐振时输入和输出之间的恒定相位差,从而可以锁定该相位差来跟踪谐振峰值。某些谐振器在谐振时会发生突然的相移,这使得 PLL 难以保持恒定的相位差。双频谐振跟踪可以克服这一缺点,它不依赖相位来跟踪谐振,而是使用频域中高于和低于谐振频率的两个信号。这使得 DFRT 系统能够不断比较这些频率分量的幅度,并调整波形发生器以使这些幅度相等。该谐振跟踪已使用石英晶体(一种常见的谐振器)进行了测试。
本实验使用的晶体为4.096 MHz(标称值)石英晶体,频率稳定度为+/-50 ppm。通过使用公差较小的晶体,可以测试DFRT的极限。
改变晶体中的共振
在第一部分中,我们将 Moku FIR 滤波器生成器配置为具有特定中心频率的窄带通滤波器,以模拟谐振器的行为。通过改变该滤波器的中心频率,我们能够模拟谐振的偏差。在第二部分中,我们操纵真实的石英晶体来改变谐振,同时 DFRT 跟踪谐振峰。
晶体谐振器通常非常稳定,并且具有非常高的Q值,Q值是衡量晶体质量的指标。在正常条件下,谐振峰的偏差很小。某些条件会导致谐振峰发生变化,例如对晶体施加热量。晶体谐振器的数据表中会注明工作温度,并且晶体通常在相对较高的温度下也能在容差范围内保持谐振。如果温度持续升高超过规定范围,则会导致谐振峰漂移到容差范围之外。
为了首先验证晶体的谐振频率,我们使用了 Moku 频率响应分析仪 (FRA)。该工具允许用户查看设备或电路的频率响应。FRA 的工作原理是扫描指定频率范围内的正弦波,并绘制设备的响应图以及相移随频率的变化图。使用 FRA,可以找到谐振峰值,然后将其与标称谐振频率进行比较。
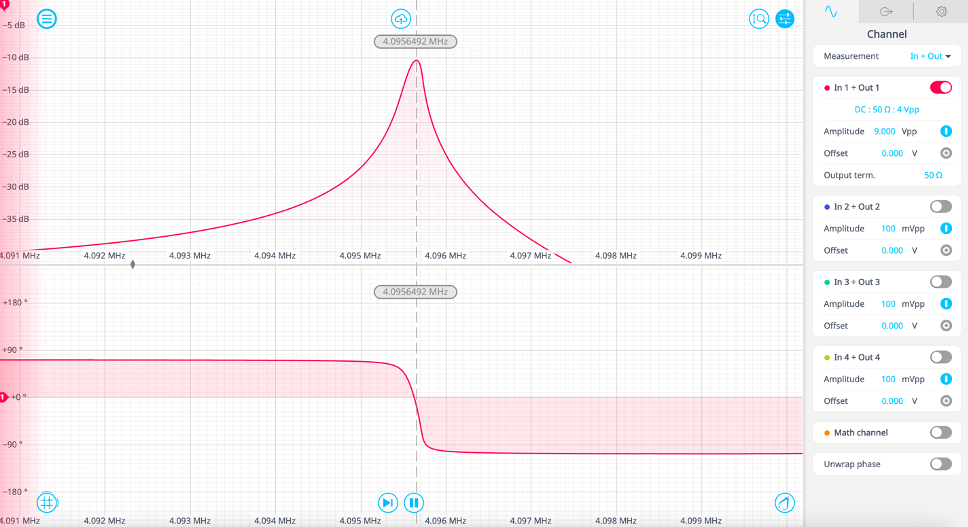
在实施 DFRT 时,重要的是用谐振两侧的频率驱动谐振器或悬臂。例如,如果谐振峰值为 1 MHz,则可以在 900 kHz 和 1.1 MHz 左右驱动谐振器,以有效跟踪谐振的变化。频率偏移的间隔由晶体的预期 Q 因数决定。如果间隔太宽,响应可能太弱或噪声太大而无法有效跟踪谐振。在图 1 中,实际谐振频率为 4.0956 MHz,因此驱动信号的频率为 4.0951 和 4.096 MHz。通常,晶体的谐振峰值非常稳定,但可以引入条件来移动谐振峰值。改变晶体的负载电容是改变谐振峰值的一种方法。改变峰值的另一种方法是超出数据手册中列出的工作参数。实验中,晶体的工作温度为-10°C至60°C,但被加热至120°C。这会导致晶体的性能超出规格。当晶体被加热时,其谐振频率会升高,使用DFRT方法可以跟踪这种变化,并确保晶体在谐振状态下被驱动。
双频共振跟踪
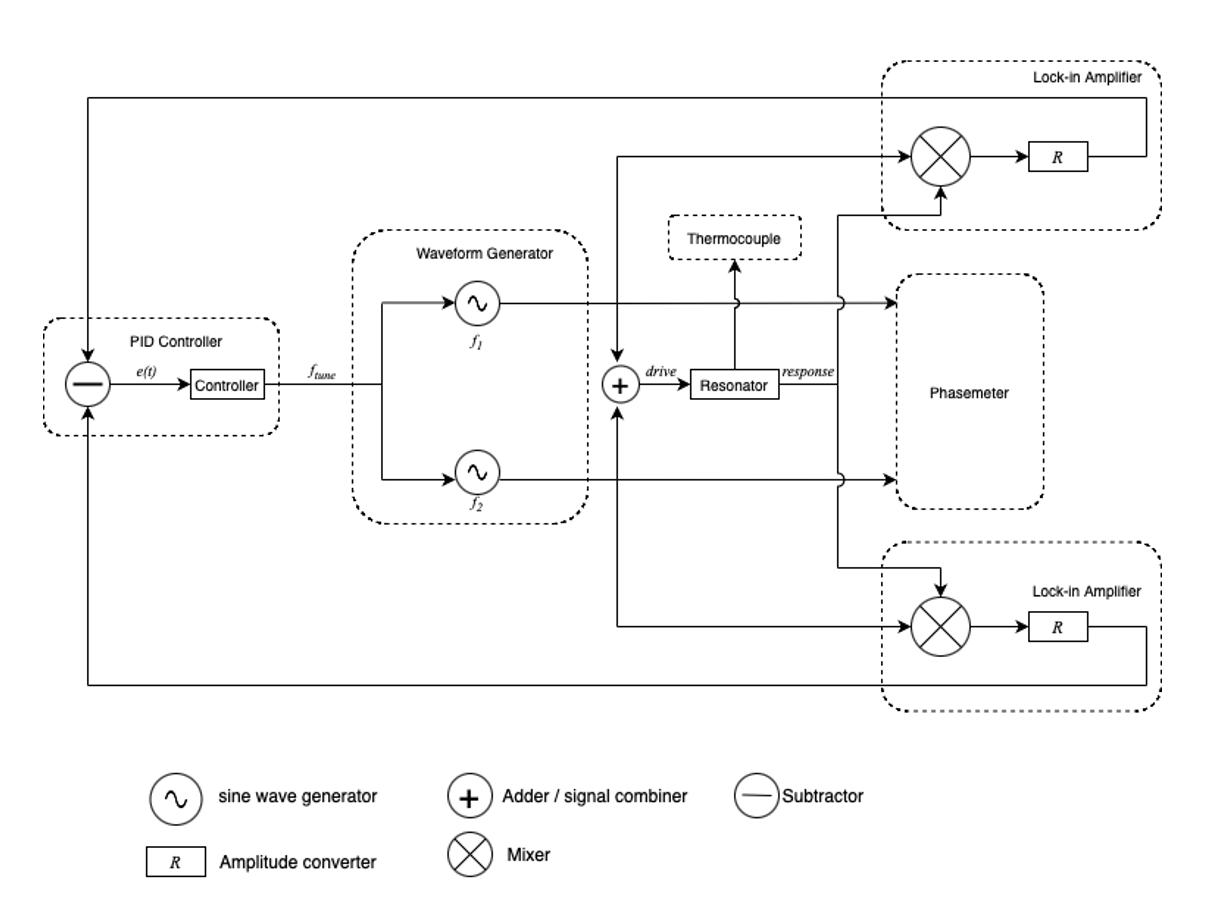
典型的 DFRT 设置将包括两个波形发生器来驱动被测设备 (DUT)、两个锁定放大器来提取谐振器响应的幅度,以及某种控制信号(通常由 PID 控制器生成),以调整生成的波形的频率。
首先在晶体上使用 Moku FRA 来了解谐振峰的频率。之所以这样做,是因为需要用高于和低于谐振频率的频率分量来驱动谐振器。一旦知道了谐振频率,就可以在合适的偏移频率下驱动谐振器。
另一个考虑因素是波形发生器的频率调制 (FM) 深度。在第 1 部分中,FM 深度为 +/-1 MHz/V,适用于移动 250 kHz 的谐振峰值,这对应于 250 mV 的电压水平。对于晶体,谐振峰值在更小的频率范围内移动。在本实验中,使用的 FM 深度为 +/- 9 kHz/V。选择该深度是基于对系统的一些预先了解。已知本应用中 PID 输出的范围为 +/- 1 V,并将其输入到波形发生器中。发生器的输入具有 10 倍衰减,这意味着 PID 范围为 +/- 0.1 V。乘以 FM 深度后,频率范围为 +/- 900 Hz,这对于高 Q 值晶体来说是合适的范围。
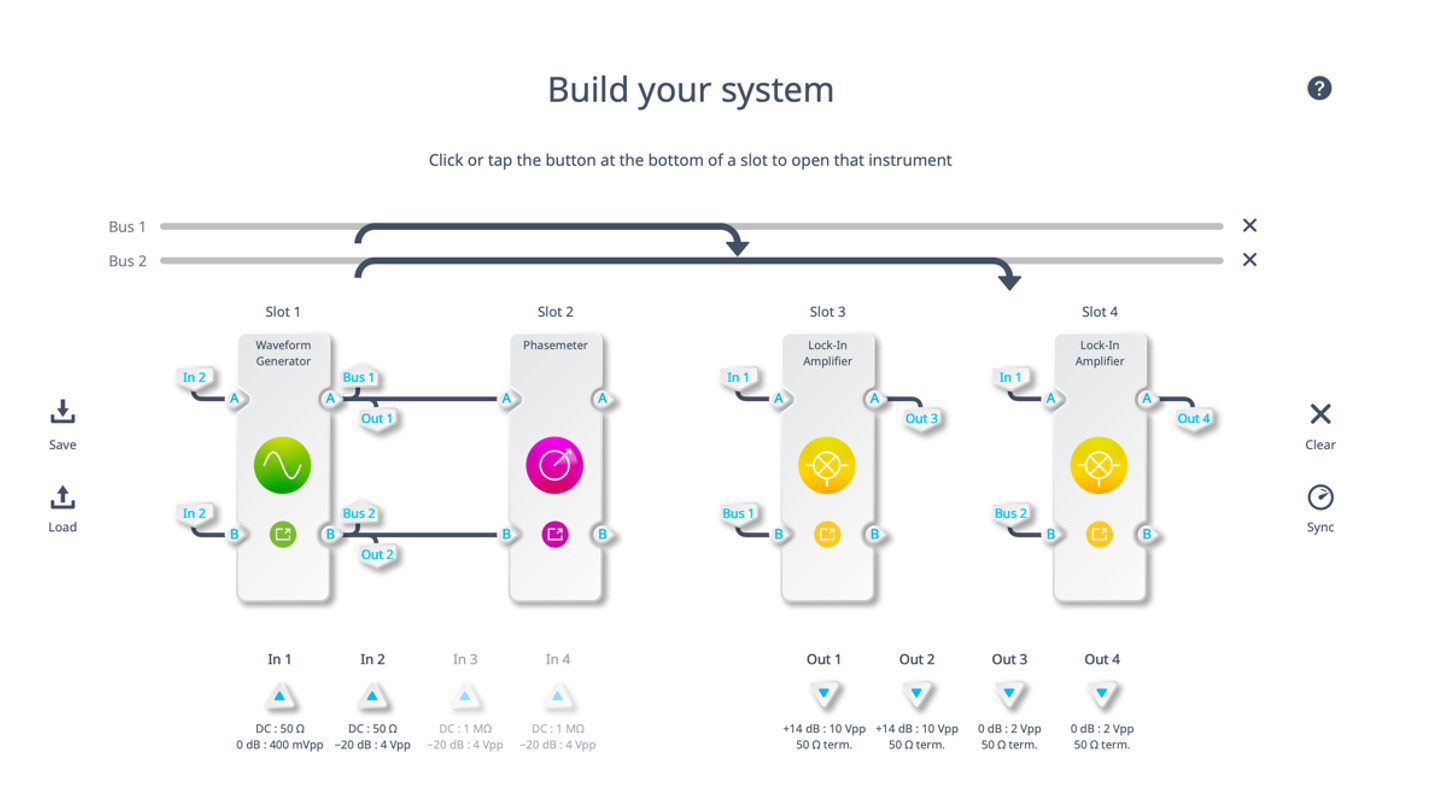
该系统的设置与第一部分中的设置非常相似,除了在系统中添加了相位计和热电偶,以及将 PID 控制器转移到单独的 Moku 之外。输出 1 和 3 路由到 PID 的输入,PID 的输出通过输入 4 路由到波形发生器的输入,如图 2 所示。相位计将跟踪波形发生器产生的两个信号的频率。由于系统不断驱动两个频率分量的振幅,直到它们相等,因此可以说谐振频率是这两个频率的平均值。通过在系统中添加相位计,可以实时测量两个波形的频率,从而允许用户实时跟踪谐振。
热电偶记录了用热风枪加热晶体时的温度。这使得用户能够记录晶体谐振频率变化时的温度。检查晶体的容差也很有用,因为它可以了解晶体在哪个温度下开始出现超出规格的行为。
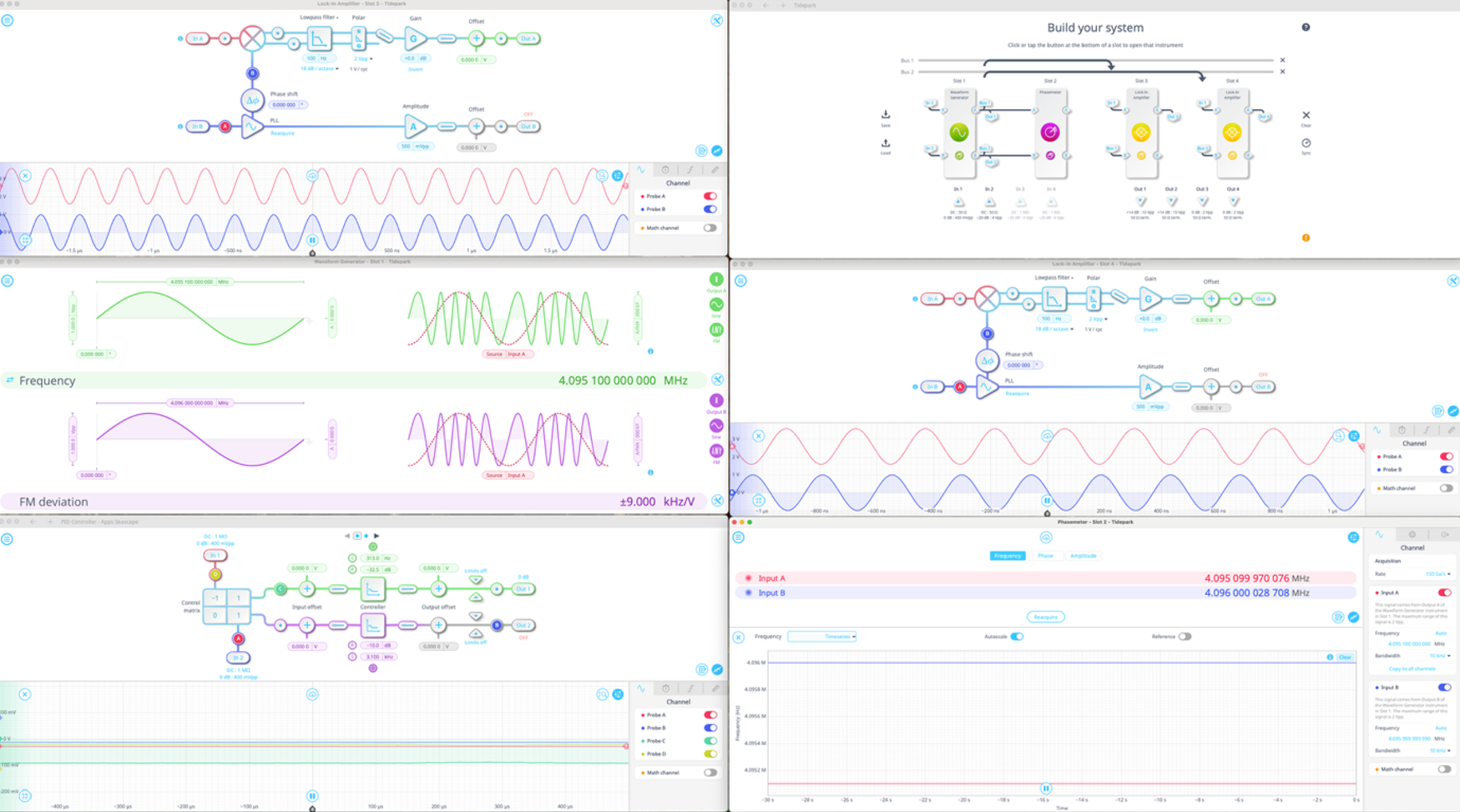
多仪器模式不仅允许用户在单个 Moku 设备上创建整个系统,还可以同时使用所有仪器,如图 3 所示。DFRT 系统的大部分功能在一台 Moku 上实现,而 PID 控制器则在另一台 Moku 上作为单个仪器运行。Moku 应用程序允许用户同时控制多台仪器和 Moku 设备,方便使用并进行实时系统分析。
本实验
系统设置完成后,数据采集开始。本实验采集并合成的数据包括温度、频率和 PID 输出。记录 PID 输出,因为它将用作波形发生器的控制信号。通过比较 PID 输出与波形发生器的调频深度,可以计算出谐振的变化量。PID 控制器将驱动波形发生器的频率升高或降低,直到两个频率分量的幅度相等。频率的变化由调频深度和 PID 电压决定。因此,可以根据这些值计算出谐振的变化。调频深度至关重要,这样才能防止 PID 输出饱和。如果使用的调频深度太小,PID 输出会在驱动波形发生器达到正确频率之前就饱和。
正确配置各仪器后,打开波形发生器驱动谐振器。波形发生器首次启动时,由于各频率分量的幅度基本相等,PID 输出基本保持不变。直到外部热量施加到谐振器上,PID 输出才会开始变化。
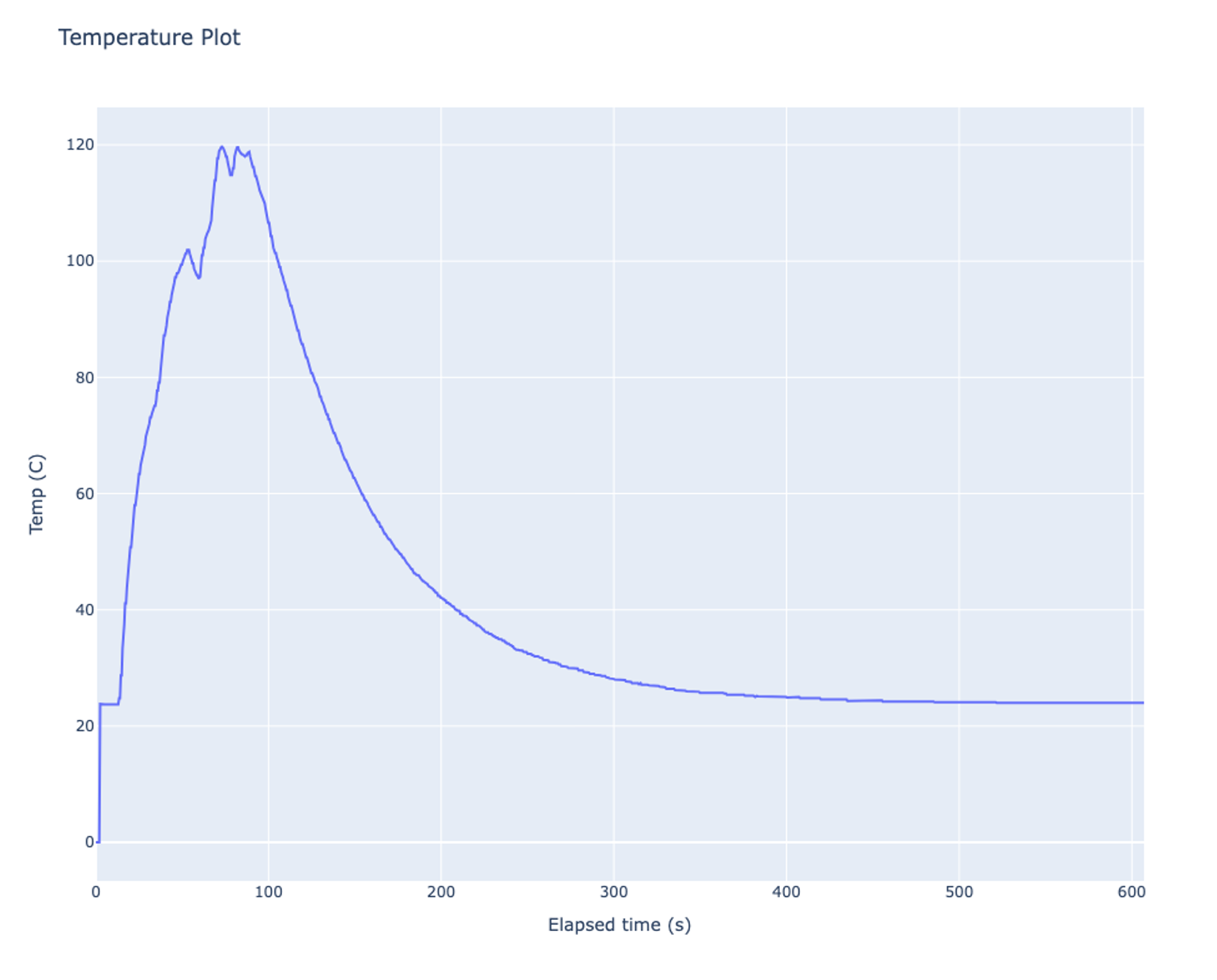
图4显示了实验进行10分钟内的温度曲线。谐振器持续加热至120℃,然后缓慢冷却至室温。在此过程中,对相位计进行监测,并与图5所示的温度曲线进行比较。
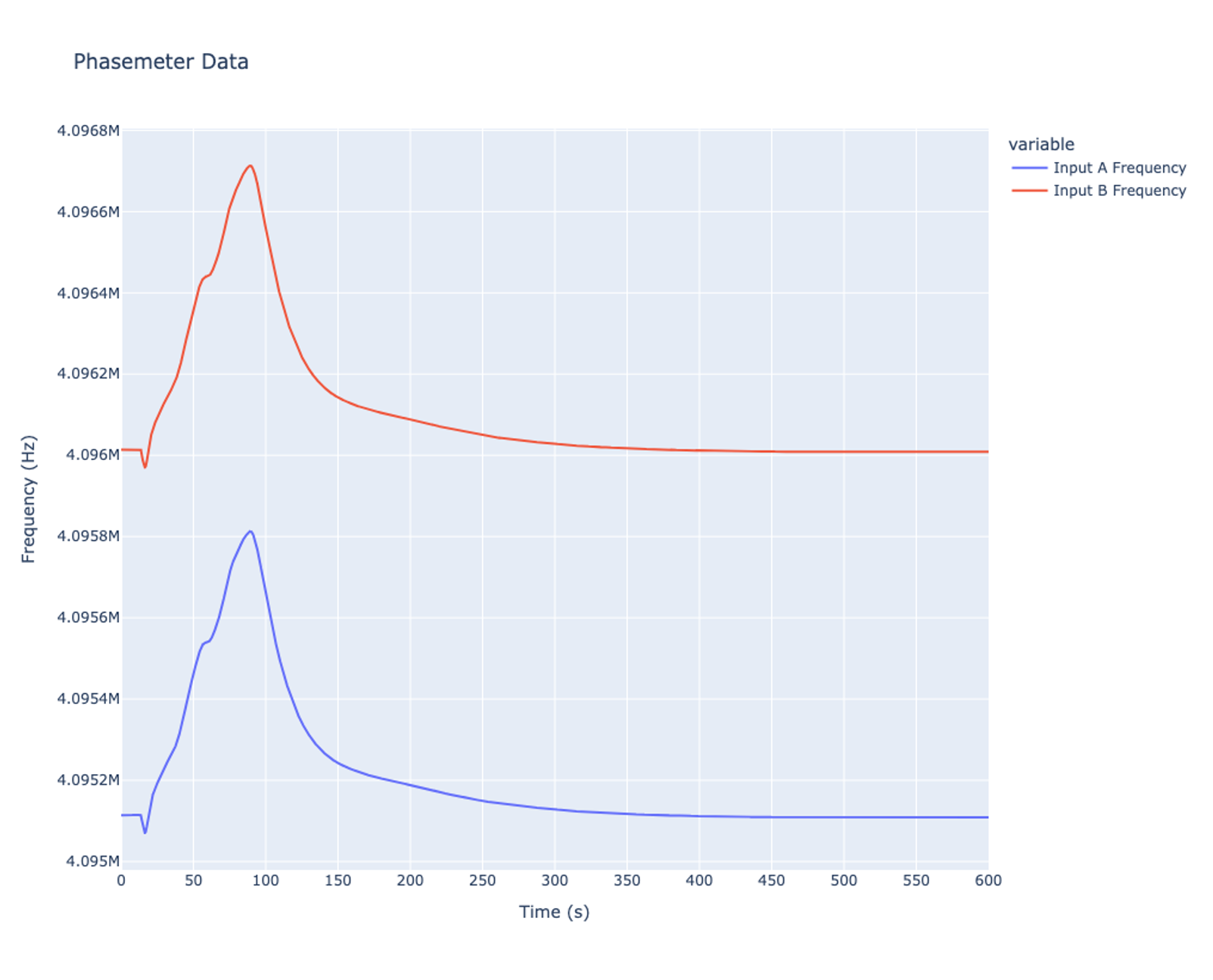
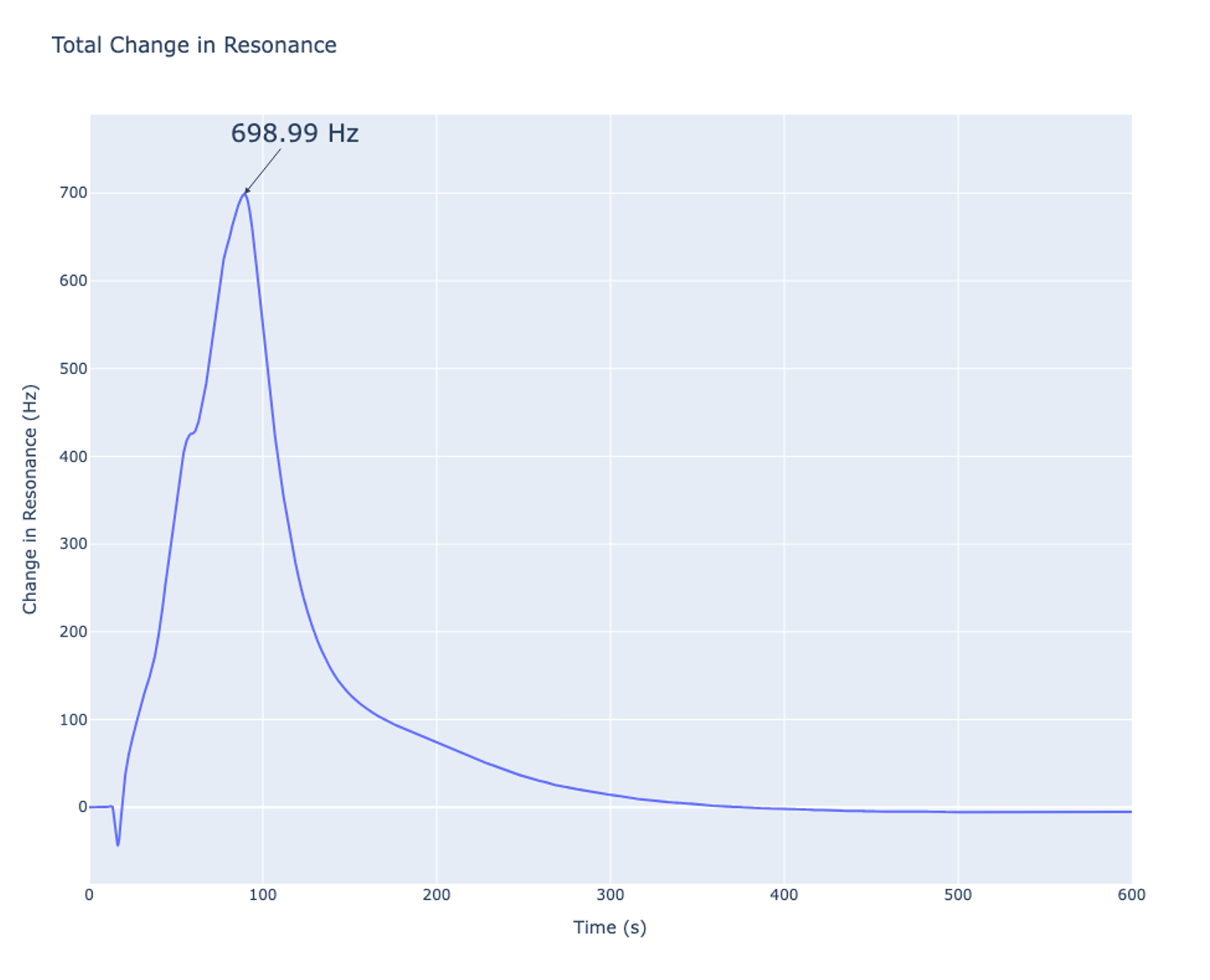
通过绘制相位计的结果,可以更容易地追踪谐振的位置及其变化量,因为谐振频率是这两条曲线的平均值。通过仅追踪其中一条曲线,从图6中很容易看出,谐振峰值在加热过程中增加了698.99 Hz。这可以通过查看PID控制器的输出并使用FM深度计算谐振的变化来验证。
值得注意的是,PID 控制器被用在了第二台 Moku:Pro 上。PID 的输出连接到运行波形发生器的 Moku 的 2 号输入,输入衰减为 -20 dB。这意味着从 PID 控制器输出并进入波形发生器的信号幅度会降低 10 倍。这样做是为了防止 PID 控制器在跟踪共振变化之前进入饱和状态。
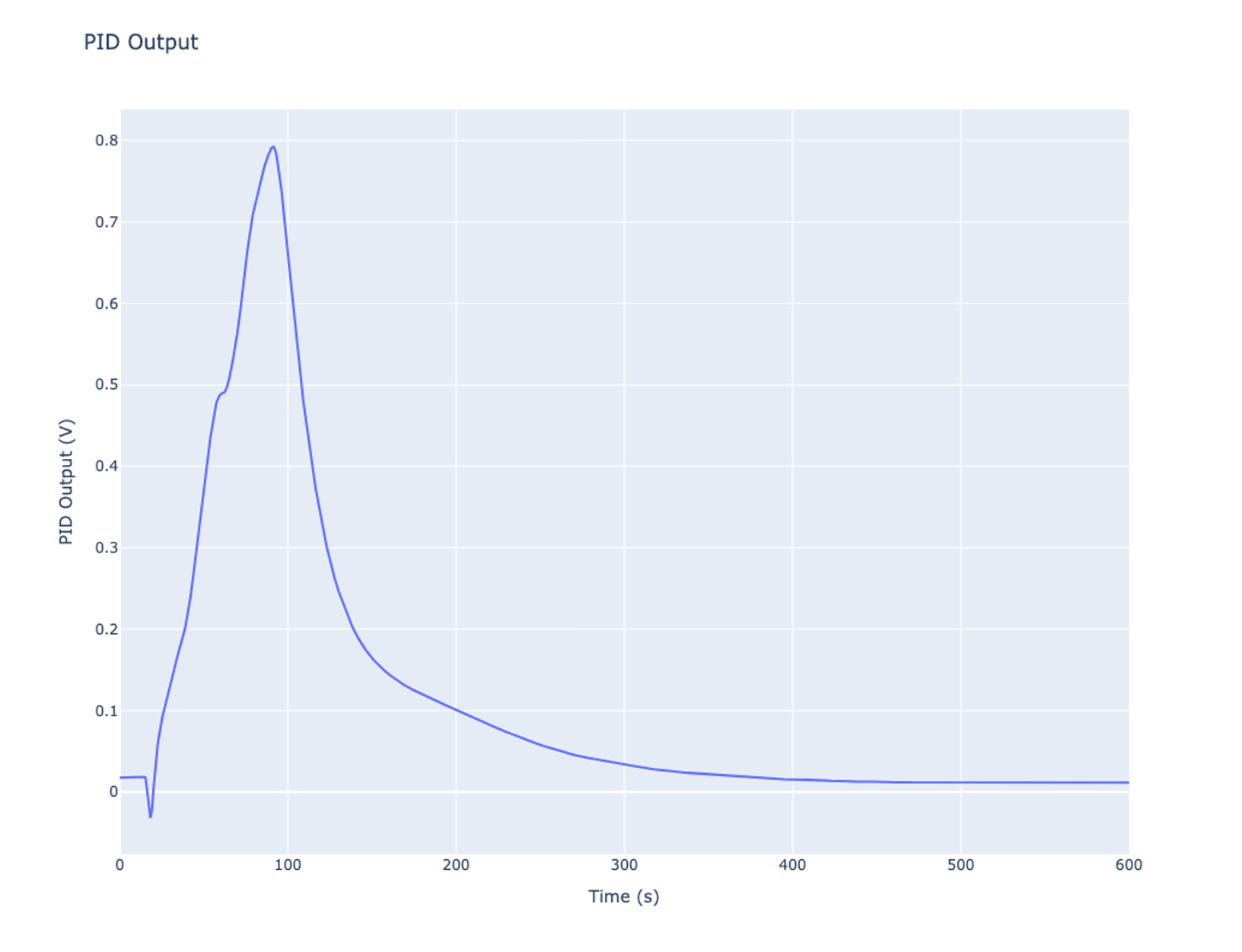
观察输出,发现变化约为 0.775 V。由于波形发生器的输入衰减为 -20 dB,因此波形发生器看到的控制信号为 0.0776 V。将其乘以波形发生器的 FM 深度,共振变化为 698.99 Hz 或约 700 Hz,这与相位计中看到的一致。
频率与温度的关系
谐振器加热每升高一度,谐振频率就会发生一定程度的变化。在本实验中,温度数据与频率数据同时采集,以便进一步分析温度与频率之间的关系。进一步的数据分析可以帮助用户构建“冷却曲线”。该曲线显示了晶体的冷却过程以及温度如何影响晶体的谐振频率。
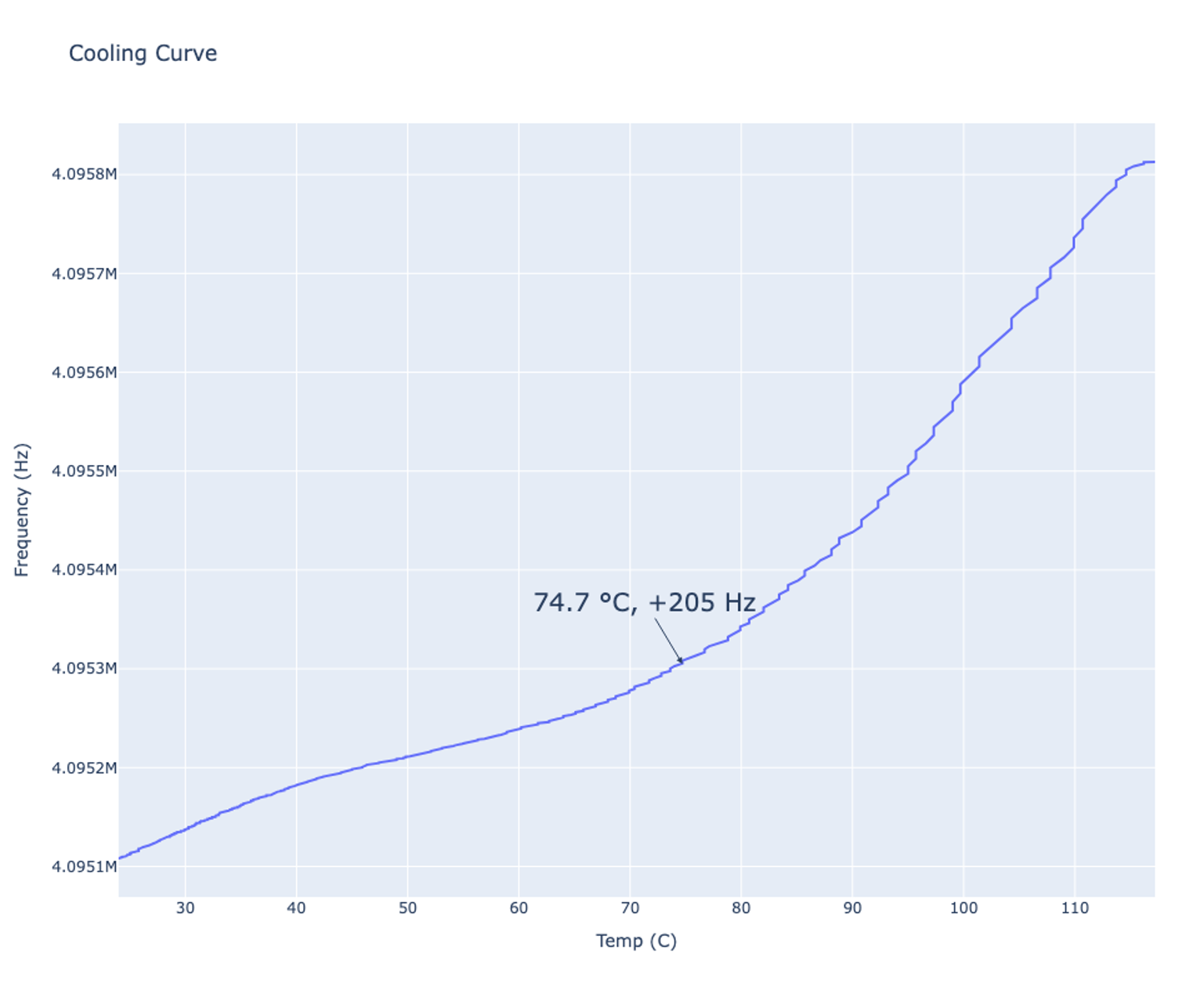
图 8 显示了冷却曲线以及该温度下较低频率波形的对应频率。通过跟踪其中一个信号的变化,可以有效地跟踪谐振的变化,因为两个波形发生器信号的变化量相同。该晶体在 -50°C 至 10°C 的温度范围内额定频率公差为 +/-60 ppm。在正常温度下,+/- 50 ppm 的频率公差对应于约 205 Hz 的变化。根据该图,晶体在高达 74.7°C 的温度下仍保持公差,这对于稳定的晶体谐振器来说是正常的。当不再施加热量时,谐振频率会持续上升,直到 120°C。
结语
双频谐振跟踪 (DFRT) 是现有谐振跟踪技术(例如锁相环 (PLL))的替代方法。DFRT 已在两台 Moku:Pro 设备上实现,用于跟踪真实晶体振荡器的谐振。该振荡器经过加热以改变其谐振频率,并能够跟踪 100 MHz 晶体 4.096 Hz 量级的振动。虽然频率响应分析仪可以跟踪谐振峰值,但与专用谐振跟踪技术相比,其分辨率有限。通过跟踪温度和频率的变化,可以构建跟踪谐振峰值的曲线,并比较温度和谐振变化。

