



实时谐振跟踪在一系列应用中都很重要,从基于微机电系统 (MEMS) 的惯性传感到原子力显微镜 (AFM)。本应用说明比较了两种跟踪谐振的方法:一种利用锁相环 (PLL),另一种利用双频谐振跟踪 (DFRT)。虽然 PLL 方法在大多数情况下效果很好,但它可能会难以应对临界耦合下出现的突然相移。DFRT 通过幅度相关反馈控制克服了这一困难,提供了更可靠的解决方案。
在这里,我们通过结合双 多频锁定检测实验 配备 PID 控制器 在一个 Moku:Pro 设备。双频信号,由双通道 波形发生器,在模拟谐振器上进行了测试,并获得了积极的结果,证明了该技术在 PLL 方法不太可靠的情况下的实用性。
引言
实现谐振跟踪的两种主要技术是 PLL 方法和 DFRT。PLL 方法依赖于监控驱动信号和系统响应之间的相位差。通过保持恒定的相位差,驱动信号被锁定到谐振频率,这在以下方面很有用: MEMS谐振追踪。图 1 显示了用于共振跟踪的 PLL 系统的框图,包括 Moku 锁相放大器、PID 控制器和波形发生器。值得注意的是,Moku 锁相放大器包括嵌入式 PID 功能,无需额外仪器即可实现共振跟踪。
锁相放大器使用驱动信号作为参考来解调响应信号,以确定两个信号之间的相位差。然后,将该相位差与目标相位偏移进行比较,并将产生的误差信号由 PID 控制器处理。PID 控制器生成频率调谐信号,该信号调节波形发生器以连续跟踪谐振频率。
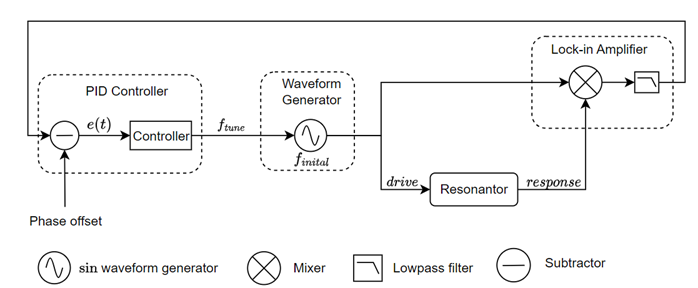
图 1:PLL 检测驱动信号和响应信号之间的相位差,并将该相位差发送至 PID 控制器。然后,PID 控制器生成控制信号。 𝒇𝒕𝒖𝒏𝒆,它调整波形发生器来调整频率并跟踪谐振频率。
为了使PLL系统有效运行,驱动信号和响应信号之间应保持连续的相位关系,因为驱动频率会发生变化。这使得PLL非常适合通常以过耦合模式工作的MEMS陀螺仪,以及某些AFM。 微悬臂传感器 在欠耦合条件下可以正常工作。然而,在临界耦合条件下,其性能受到限制。在这种情况下,扫描频率从 \(f_ {res} ^- \) 至 \(f_ {res} ^ + \)导致谐振时相移突然发生180°。这种突变可能会扰乱跟踪过程,并可能引发振荡。虽然这种情况并不常见,但一旦发生,可能会带来重大挑战。
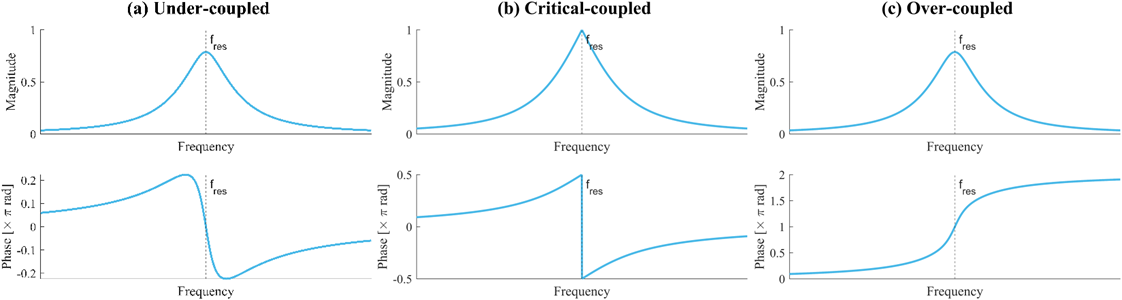
图2:谐振行为可分为三种耦合条件:欠耦合、临界耦合和过耦合。在欠耦合和过耦合条件下,谐振频率\(text{(}f_{res}text{)}\)附近的相位变化均为线性且连续的。在临界耦合条件下,在\(f_{res}\)附近观察到180°的相移。谐振特性源自微环谐振器耦合系统的模拟。
此外,为了在 AFM 应用中实现可靠的 PLL 功能,系统的相位响应应在悬臂扫描时在谐振器频率下保持稳定。这种稳定性至关重要,因为 PLL 只能维持固定的相位差——谐振器频率下相位响应的任何变化都可能导致跟踪谐振器频率时出现误差。然而,在某些情况下,例如在压电响应力显微镜中,这可能无法实现,其中悬臂的偏转信号根据其相对于驱动电场的极化排列,在相反取向的畴之间表现出 180° 的相位翻转。由于相位响应不稳定,PLL 方法无法跟踪正确的谐振频率。因此,由于扫描不同材料时相位到频率的映射关系会发生变化,因此跟踪到的谐振频率可能不是正确的频率。例如,在畴壁的两侧,一侧在谐振频率下具有90°的相位差,而另一侧的谐振频率为-90°。为了应对这些挑战,需要采用诸如DFRT之类的替代谐振跟踪技术。
双频共振跟踪
有效的 PID 控制要求误差信号在中心谐振频率两侧呈现相反的符号。这可以通过对对称信号进行微分来实现,将其转换为反对称形式,并进行精确反馈控制所需的符号变化。图 3 比较了 AFM 微悬臂传感器的原始幅度响应和微分幅度响应。研究原始幅度响应时,无法从单独的幅度测量中确定相对于谐振频率 (\(f_{res}\)) 的当前频率——单个幅度值对应两个不同的频率值,分别位于 \(f_{res}\) 的两侧。相反,微分响应解决了这种模糊性:在左侧,当频率低于 \(f_{res}\) 时,微分幅度值为正;而在右侧,当频率超过 \(f_{res}\) 时,微分幅度值为负。这种区别使得 PID 控制能够更精确地跟踪谐振。
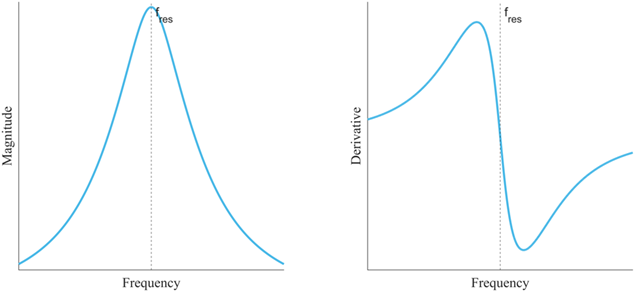
图 3:原始谐振器幅度响应(左)是对称的。相反,其导数(右)产生反对称幅度曲线,谐振两侧符号相反,非常适合反馈控制。
类似地,双频谐振跟踪的工作原理与导数类似,但导数步长固定为\(f_2 – f_1\)。双频跟踪的概念如图 4 所示。两个音调的幅度取决于它们与谐振频率的接近程度。如果\(f_1\) 比 \(f_2\) 更接近谐振频率,则 \(f_1\) 音调的幅度将大于 \(f_2\),反之亦然。因此,关键在于移动 \(f_1\) 和 \(f_2\) 的中心频率,使其中心与谐振频率匹配。图 5 提供了一个解释性图表。因此,当中心频率 \(frac{f_2 + f_1}{2}\) 与 \(f_{res}\) 对齐时,误差信号保持为零。
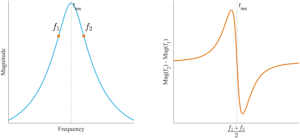
图 4:谐振幅度响应围绕中心频率对称。频率 f_1 和 f_2 之间的频率差为 f_2 – f_1,中心频率为 frac{f_2 + f_1}{2}。误差信号由两个频率分量的幅度相减得到。
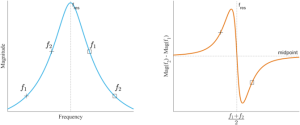
图 5:该图展示了两种情况。“+”表示中心频率 \(frac{f_2 + f_1}{2}\) 低于谐振器频率 \(f_{res}\) 的情况。相反,“☐”表示中心频率超过 \(f_{res}\) 的情况。由此产生的响应 \(f_2 – f_1\) 在中点以上显示“+”,在中点以下显示“☐”。因此,PID 控制器可以根据需要调整中心频率,使其与谐振器频率一致。
Moku:Pro 上的实现
二 多频锁定检测实验 需要检测输入信号中两个频率分量的振幅,然后由 PID 控制器进行减法运算以稳定系统。双频谐振跟踪的原理如图 6 所示。在此设置中,使用波形发生器生成两个正弦波形,通过信号组合器组合,然后施加到谐振器。然后测量两个频率音调的振幅并将其输入到 PID 控制器中以实现谐振跟踪。
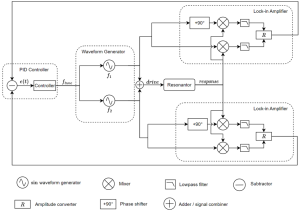
图 6:双频谐振跟踪装置的框图。两个频率分量 f1 和 f2 由独立的正弦波发生器产生,并通过模拟信号组合器进行组合,然后发送至谐振器。两个频率分量均由双相解调器解调,并计算每个音调的幅度。两个幅度之间的差值 e(t) 随后被发送至 PID 控制器,用于频率调节和谐振跟踪。
图 7 展示了使用 多仪器并行模式 on Moku:Pro在该装置中,两个锁定放大器(一个位于插槽 1,另一个位于插槽 2)用于测量两个频率分量的幅度。幅度信号被发送到插槽 3 中的 PID 控制器,该控制器生成反馈控制信号。该控制信号对 波形发生器,使其能够调整中心频率并有效跟踪谐振。波形发生器的两个通道分别作为参考信号发送到两个锁相放大器。

图 7:配置为共振跟踪的 Moku:Pro。双通道波形发生器设置为频率调制正弦波发生器,使用 PID 控制器的控制信号来调整中心频率。误差信号是通过减去两个锁定放大器的输出而产生的。
波形发生器的配置如图 8 所示。波形发生器使用分别设置为 10 MHz 和 11 MHz 的独立通道产生两个频率分量,使它们之间的频率差为 1 MHz (\(f_2 – f_1 = 1\) MHz)。两个通道的频率调制深度均为 1 MHz/V,并由同一输入信号(输入 A)调制。这确保两个通道均受到同等调制,从而保持一致的 1 MHz 频率差。然后,这两个信号被发送到两个锁相放大器,用作参考信号来解调来自谐振器的响应信号。
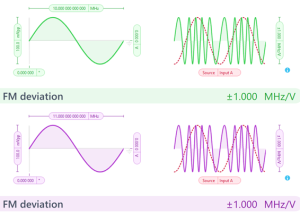
图 8:双通道波形发生器设置了 10 MHz 和 11 MHz 的正弦波发生器。两个通道的频率调制深度均配置为 1 MHz/V,以确保两个音调的调制一致性。
锁相放大器(两者配置相同)的配置如图 9 所示。锁相放大器具有内部 PLL,可将其本振锁定到 In-B(波形发生器输出)上接收的信号。锁相放大器中的 PLL 仅用于生成解调参考,不参与谐振器频率跟踪。为了减少相邻频率成分的干扰,锁相放大器的低通滤波器设置为 100 Hz,斜率为 18 dB/倍频程。值得注意的是,应调整低通滤波器的转折频率以与实验中的 AFM 扫描速率或信号带宽保持一致。如果扫描速率超过滤波器的响应时间,则可能无法准确跟踪幅度和谐振器频率转换。锁相放大器测量 In-A 信号(谐振器响应)中相应频率成分的幅度,并通过 Out-A 输出结果。

图 9:锁定放大器的配置。解调参考信号直接来自波形发生器的输出。低通滤波器的转折频率为 100 Hz,滚降率为 18 dB/倍频程。In-A 的幅度(在谐振器响应中测得的音调)被发送到 Out-A。
误差信号是通过减去两个锁定放大器的输出获得的,该操作由 PID 控制器 (见图10)。为了最小化误差信号,PID控制器配置为比例积分(PI)控制器。积分器消除直流误差信号。积分器的过零点可以根据实验要求进行调整。提高积分器交叉频率可以加快谐振跟踪速度,但可能会降低相位裕度,从而可能导致不必要的过冲或振荡。

图 10:误差信号由控制矩阵 (In-B - In-A) 生成,然后发送至 PID 控制器。PID 控制器的比例增益配置为 -12.7 dB,积分器的交叉频率为 50.33 Hz。
在本实验中,使用中心频率可变的带通滤波器模拟谐振器,导致两个频率音调的幅度根据滤波器的中心频率而变化。设备连接和 FIR 滤波器配置分别如图 11 和 12 所示。调整 FIR 滤波器的中心频率以评估 DFRT 的性能。
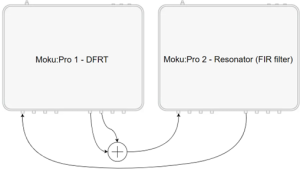
图 11:设备和 BNC 线缆连接如下:Moku:Pro 1 用于谐振跟踪,而 Moku:Pro 2 使用 FIR 滤波器模拟谐振器。FIR 滤波器配置为中心频率可变的带通滤波器。Moku:Pro 1 产生的两个频率音调通过模拟信号合成器进行合成。
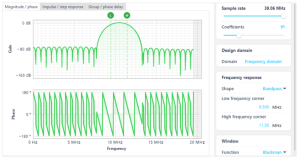
图 12:FIR 滤波器配置为带通滤波器,采样率为 39.06 MHz,系数为 61 个。中心频率设置为 10 MHz,可以进行调整以评估谐振跟踪性能。
最后,使用 DFRT 成功锁定谐振。PID 控制器的用户界面(如图 13 所示)显示控制信号输出。FIR 滤波器的中心频率以 10.5 MHz 的步长从 11.5 MHz 调整至 0.25 MHz。PID 输出中的每个步长对应约 250 mV 的控制信号变化,这转换为 0.25 MHz 的频率调制。需要注意的是,步长并不完全与 250 mV 匹配,因为 FIR 带通滤波器的响应曲线并非围绕中心频率完全对称。这种不匹配也反映了真实谐振器的行为,它们可能表现出类似的幅度响应不规则性。如果需要,可以通过在 PID 控制器中引入输入偏移来补偿。
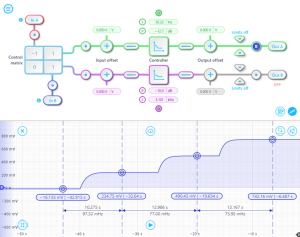
图 13:PID 控制器用户界面,蓝线表示输出控制信号。图中的标记表示控制电压。控制信号的每一步约为 250 mV,对应 0.25 MHz 的频率调谐。由于 FIR 滤波器的对称性不完美,实际步长并不完全等于 250 mV。
结语
本研究介绍了实时共振跟踪的两项关键技术,这对 MEMS 惯性传感器和原子力显微镜等应用非常重要:PLL 和 DFRT。PLL 方法通过保持驱动信号和响应信号之间的恒定相位差,适用于过耦合和欠耦合系统。然而,这种方法在临界耦合条件下面临挑战,因为突然的 180° 相移会干扰跟踪。此外,当相位响应受到被测材料的影响时,这种方法效果会较差。
为了解决这个问题,DFRT 使用双频信号来确定谐振频率,从而通过 PID 控制器实现精确的反馈控制。DRFT 已在 Moku:Pro 上成功实现,能够有效跟踪用 FIR 滤波器模拟的谐振器中的频率偏差。值得注意的是,Moku:Pro DFRT 仅专注于跟踪 f_{res},并不测量谐振器在 f_{res} 下的幅度或相位响应。获取这些响应特性需要额外的 Moku 硬件设备。
结果表明,DFRT 实现了稳定而准确的谐振跟踪,并实时调整以补偿谐振器的不对称性。这确立了 DFRT 是 PLL 方法的可行替代方案,特别是在关键耦合或材料变化影响 PLL 方法性能的情况下。通过利用幅度响应作为误差信号,DFRT 可提高此类条件下的跟踪精度和稳健性。
案例
[1] BJ Rodriguez、C. Callahan、SV Kalinin 和 R. Proksch,“双频共振跟踪原子力显微镜”, 纳米技术,卷。 18、没有。 47,p。 475504,2007 年 XNUMX 月,doi: 10.1088/0957-4484/18/47/475504.

