



このシリーズでは、周波数領域で発生するフィードバック制御について簡単に紹介することで、ループの設計とデバッグに関する実用的なリファレンスを提供します。
一部3: 安定性と遅延
3.1 イントロダクション
これまでの部分で、フィードバック制御ループの基本的な特性について理解しました。 このシリーズ、それらについて議論した 第2部ここで、この分野の初心者を困惑させがちなテーマ、つまり安定性について取り上げます。幸い、周波数領域での操作により、このテーマを比較的簡単に扱うことができます。
第1部 伝達関数の定義を確立し、複雑なシステムをモデル化するための制御ループブロック図を構築するためのコンポーネントを提供します。 第2部 フィードバック制御システムを使用して外乱を抑制したり、プロセス設定値を追跡したりする方法を説明します。ノイズの多いセンサーに関連する複雑さについても説明します。オープンループシステムとは異なり、フィードバック制御下のデバイスは不安定になる可能性があり、パフォーマンスと堅牢性の間に緊張関係があります。最終的には、信号伝播の遅延が最も厳しい制限を課す可能性があります。これらの問題は、パート3で取り上げます。周波数領域では、フィードバックシステムのほとんどのパラメータは、そのオープンループ伝達関数にリンクできます。 第4部 この重要な量を測定する方法を説明し、それを形作る際によく使用される関数のリストを示します。 第5部 アクチュエータの飽和を回避する方法の一つを説明し、その際に複数のアクチュエータを扱う際に役立つアイデアを紹介する。このシリーズの最後は 第6部 の研究により PIDコントローラーこの共通制御アーキテクチャは、通常、時間領域の観点から検討されますが、ここでは補完的な周波数領域表現を示します。
3.2 安定性
これまでに導出された伝達関数はすべて分母が1 + Gここで、 G は開ループ伝達関数である。したがって、 G = −1 では、システムは不安定になり、出力は無制限になります。実際、−1 点に近づくだけでも、リンギングやゲインピーキングが発生します (図を参照)。 3.2).
ゲインと位相を定義する 余白 この不安定な状態からどれだけ「遠い」のかを定量化するためです。
ゲインマージン: \(omega_{180}\)とします 頻度は ∠G = −180°ゲインマージン、 GM は次のように定義される。
\(GM = frac{1}{left| G(iomega_{180})right|}\) または \(GM[dB] = -20 log_{10} left( left| G(iomega_{180})right| right)\).
一般的に、ゲインマージンとは、限界に達する前にゲインをどれだけ増加/減少できるかを示します。 G = −1 ポイント。この文脈では、プロセス効率や調整などの要因によるゲインの変化は、ユーザーが開始した変化と同等か、それ以上に重要です。
位相マージン: \(omega_{UGF}\)を思い出してください は、| の頻度です。G| = 1. 位相マージン PM として定義される
\(PM = 180^{circ} + 角度 G(i omega_{UGF})\)。
位相マージンは、不安定性に達する前に許容できる追加の位相遅延の量を表します。
これらのマージンを、フェーズを仮定して定式化した。 遅れ通常はそうである。開ループ伝達関数が位相 鉛、 私たちは、次の点に焦点を当ててマージンを構築します。 ∠G = +180◦ ポイント、ここで G = −1 が達成可能です。
安定性を確保するには、正の位相余裕、\(左|角度 G(i omega_{UGF}) 右| < 180^{circ}\)が必要です。 そして、最初からオープンループで安定したシステムでした。
より正式には、不安定性は1 + G(s)には右半平面零点が含まれる。厳密に扱うと、たとえ到達しなくても不安定性は起こり得ることがわかる。 G = −1。上記の規則は、ほとんどのシステム(つまり、最小位相システム)でこの事態をカバーします。
システムがいずれかのタイプの複数のマージンを示すことも珍しくありません。閉ループ安定性を評価するときは、それぞれを個別に考慮する必要があります。図 3.1 ゲインと位相マージンが注釈された典型的なオープンループ周波数応答を示します。
このシリーズのこの部分では、安定性に主眼を置いています。安定性は堅牢性と同じではないことを強調します。堅牢なシステムを実現するには、 PM の三脚と GM マージンをできるだけ大きくする必要があります。残念ながら、マージンを大きくすると絶対的なパフォーマンスが低下する傾向があるため、設計者は十分な情報に基づいてトレードオフを行う必要があります(図を参照)。 3.2).
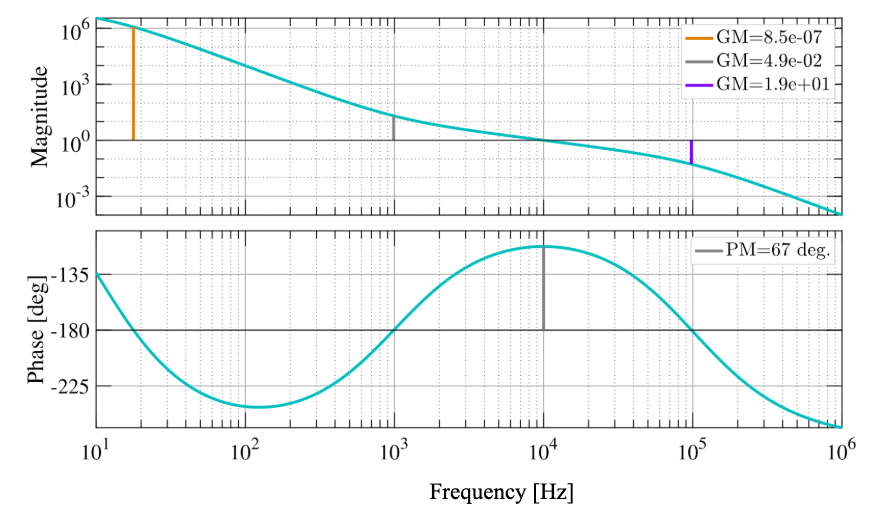
図3.1: 典型的な開ループ伝達関数のゲインと位相余裕。このシステムには複数のゲイン余裕があり、ゲインが増加すると不安定になることがあります。 or 減少した。このようなシステムは 条件付きで 安定。システムが条件付きで安定している場合、ロックを取得する際には注意が必要です。ゲインを徐々に増加させて目的の動作点に到達しても機能しません。

図3.2: 上: 1つのオープンループ伝達関数。最初の関数は5kHzのユニティゲインを持ち、1番目の関数はXNUMXkHzで、全体のゲインを単純に増加させることで実現されています。下: 対応するXNUMX/(1 +G)伝達関数(外乱除去に関連、参照(2.1))。ゲインを上げると低周波性能が向上することがわかります。しかし、ユニティゲイン付近では、外乱は実際には増幅されます。この現象は、 ゲインピーキング位相マージンが減少すると、ゲインピーキングが増加します。図も参照してください。 3.4(付録A).
経験則:
- OLTFのユニティゲインでの傾きは1であるべきである。/f
- ゲインマージンは2より大きいか0.5未満である必要があります
- 位相余裕は > 30° 妨害波の除去と > 45° 参照追跡用
3.3 ディレイ
フィードバックループの遅延は安定性に影響します。遅延はデジタル処理によって発生する場合もあれば、プラント固有のものである場合もあります。非常に冷たくなり、その後突然熱くなりすぎる。遅延の伝達関数 τ に選出しました。 ラプラス領域 is
\(H_{遅延}(タウ, s) = e^{-s タウ}\)。
このような遅延により位相余裕は\(omega_{UGF} tau\)の量だけ減少する。。 図 3.3 遅延の伝達関数とそれが一般的な OLTF に与える影響をグラフ化します。
遅延は安定化すべきシステムの不可欠な部分であり、排除できないため、最終的なループ パフォーマンスを制限することがよくあります。

図3.3: 上: 遅延の周波数応答(この場合は10 µs)。振幅はすべての周波数で1に等しく、位相角は−ωτ下: 上記の遅延を含む一般的な OLTF (青の実線) と含まない一般的な OLTF (オレンジの破線)。遅延により位相マージンが減少し、設計の自由度が制限されます。
3.4 製品概要
このシリーズのこの巻では、システムが不安定性からどれだけ「遠い」かを定量化する指標を展開し、ループがゲインピーキングを介して外乱を増幅する可能性があることを観察しました。特に、避けられない遅延がある場合です。ほとんどの場合、パフォーマンスと安定性は、フィードバック制御ループの設計に相反する要求を課します。ループ設計の真の技術は、さまざまな制約を同時にバランスさせるためにコントローラの形状を調整することです。この「ループシェーピング」については、次の記事で説明します。 第4部 私たちのシリーズの。
付録A: 図のシステムのステップ応答 3.2

図3.4: 図XNUMXで説明したXNUMXつのシステムの時間的応答 3.2 設定点の単位ステップに比例します。位相マージンが小さいとオーバーシュートが大きくなり、 振動行動現在の私たちの研究は周波数領域技術に重点を置いているため、このグラフは付録にまとめられています。しかし、このグラフを含めることで、両領域の重要性と相補性が強調されることを期待しています。

