



このシリーズでは、周波数領域で発生するフィードバック制御について簡単に紹介することで、ループの設計とデバッグに関する実用的なリファレンスを提供します。
4.1 イントロダクション
ループのすべての特性は、そのオープンループ伝達関数(OLTF)によって決定され、 G, そして、この量こそが、要求される性能目標を達成するために修正しなければならない量である。しかし、プラントとセンサーの伝達関数は一般的に固定されており、利用可能な自由度はコントローラにのみ存在する。したがって、コントローラの伝達関数を調整する。 COLTFを変更するために、このタイプの周波数領域チューニングは、しばしば ループシェーピング.
第1部 伝達関数の定義を確立し、複雑なシステムをモデル化するための制御ループブロック図を構築するためのコンポーネントを提供します。 第2部 フィードバック制御システムを使用して外乱を抑制したり、プロセス設定値を追跡したりする方法を説明します。ノイズの多いセンサーに関連する複雑さについても説明します。オープンループシステムとは異なり、フィードバック制御下のデバイスは不安定になる可能性があり、パフォーマンスと堅牢性の間に緊張関係があります。最終的には、信号伝播の遅延が最も厳しい制限を課す可能性があります。これらの問題は、 第3部周波数領域では、フィードバック システムのほとんどのパラメータは、そのオープン ループ伝達関数にリンクできます。パート 4 では、この重要な量を測定する方法を説明し、その形成によく使用される関数のリストを示します。 第5部 アクチュエータの飽和を回避する 1 つの方法について説明し、複数のアクチュエータの処理に役立つアイデアを紹介します。このシリーズの最後は PID コントローラの研究です。この一般的な制御アーキテクチャは、通常、時間領域の観点から検討されますが、ここでは補完的な周波数領域表現を示します。
4.2 設計原則
これまでの議論に基づいて このシリーズ設計ルールは次のとおりです。
- 作る |G| 外乱を抑え、設定点をうまく追跡するために、できるだけ大きくします((2.1))
- 作る |G| センサーノイズによる測定値の乱れを防ぐために、できるだけ小さくします((2.2))
- 優れた安定性と堅牢性を維持しながら( §3.2)
この作業は、OLTFの傾きと位相の関係によってさらに複雑になる。
\(|G| sim f_n 右矢印角 G sim n 回 90^{circ}\).
高いゲインを実現するには、急峻な傾斜が必要ですが、これによりループの位相が失われ、不安定になります。
有効なループを見つけることは、これらの競合する要件が一般に異なる周波数帯域に適用されることを理解するまでは、不可能な作業のように思えます。外乱は低周波数で最大になり、安定性はユニティ ゲイン付近の動作によってのみ定義され、センサー ノイズは高周波数で最も支配的になることが多いです。
このように、コントローラは基本要素から構成されます( §A)は、低周波数での高いゲイン、UGFでの許容位相マージン、および高周波数での低いゲインを実現します(図のループを参照)。 3.1).
ループ形成は反復的なプロセスです。最初のループは、基本的な閉ループ制御を実現し、システム特性とモデル検証を可能にするためだけに機能します( §4.3) フリーランニングノイズやプラント/センサー伝達関数が不明であるか、オープンループで測定できない可能性があります。この時点から、フリーランニング (測定されたループの影響を「元に戻す」ことによって) とクローズドループ出力を定量化できます。次に、要件の実現可能性について話し合い、遅延、共振、飽和などの現実世界の影響がある状態でループを最適化し始めることができます。
練習と経験を積むと、ゲインを上げてノイズを減らしたり、補償器を追加して位相を数度回復したり、共振をノッチングしたりするなどのテクニックを使って、ループのチューニングが自然にできるようになります。
4.3 OLTFの測定

図 4.1: フィードフォワードによる出力の乱れへの対処。
オープンループ伝達関数は、周波数応答アナライザを使用して実験的に測定できます。システムで許可されている場合は、コンポーネントを直列に接続して応答を測定するだけで、ループを開いた状態で測定を行うことができます。多くの場合、代表的なダイナミクスは、目的の動作ポイントの周り、つまり閉ループ制御下のシステムでのみプローブできます。
幸いなことに、ループが閉じている状態での測定からOLTFを測定することが可能です。ループの任意のポイントに加算器を導入することで、刺激信号または励起信号\(X_{exc}\)を注入することができます。 加算器の両側の信号の比率は、
\(X_A = frac{1}{1+HCS}X_{exc}\) と
\(X_A = frac{1}{1+HCS}X_{exc}\)、
OLTFの負の値を与える。
\(X_A/X_B = -HCS\)、
ここでは\(X_{sp}\)に関連するDC項を無視した。 我々は\(X_{exc}\)に対するAC応答のみに興味があるからである。実際には、そのような用語は、 周波数応答アナライザ.
一般的に、比率\(X_A/X_B\) 2つの独立した測定を組み合わせるのではなく、直接測定されます。この方法では、ダイナミックレンジの制限により、低周波数と高周波数で良好なSNRを達成することが困難になる可能性があります(図を参照)。 4.2多くの場合、ループはユニティゲイン付近でのみ測定され、結果のデータは解析モデルを固定するために使用されます。
OLTF 測定を可能にするために初めてループを閉じるのは難しい場合があります。最も効率的なアプローチは、個々のコンポーネントの想定、測定、または指定された伝達関数を使用してモデルを構築することです。システムのこの大まかな説明から、基本的な機能ループを実装できます。
4.3.1 MokuによるOLTF測定
モク 周波数応答アナライザ OLTFの測定に使用できる マルチインストゥルメントモード PIDコントローラー 加算器として使用されている機器(図を参照) 4.3)。周波数応答アナライザは、In÷Outモードで使用する必要があります。両方の出力チャンネルに等しい振幅を設定します(1つの出力のみを使用する場合でも)。次の式によるMathチャンネルの出力は、B / A 望ましい結果が得られます。
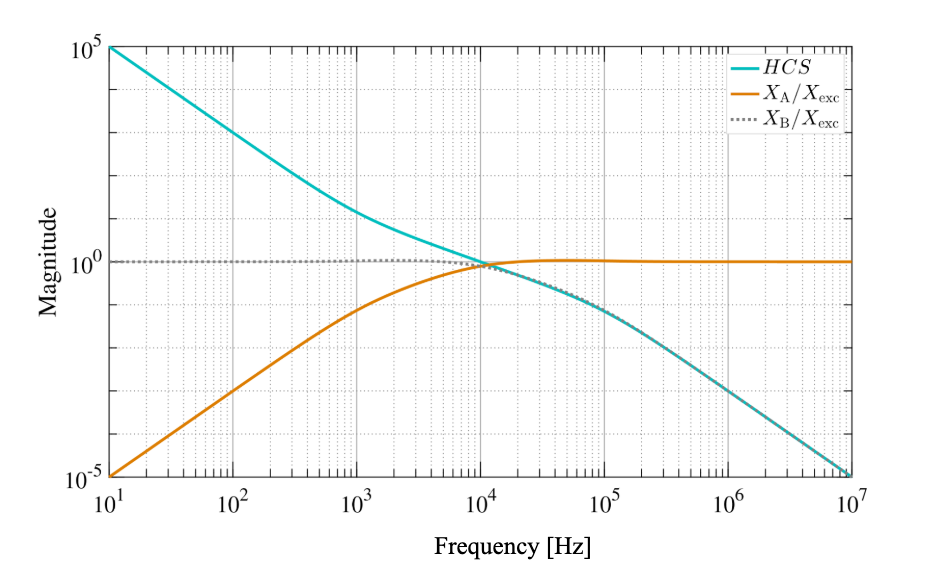
図4.2: \(X_A/X_{exc}\)の大きさ そして \(X_B/X_{esc}\) 典型的な開ループ伝達関数の場合 HCS高周波と低周波では、応答が数桁異なるため、両方の量を同時に高忠実度で測定することが困難な場合があります。そのため、オープンループ伝達関数の測定は、多くの場合、単位ゲイン付近でのみ行われます。
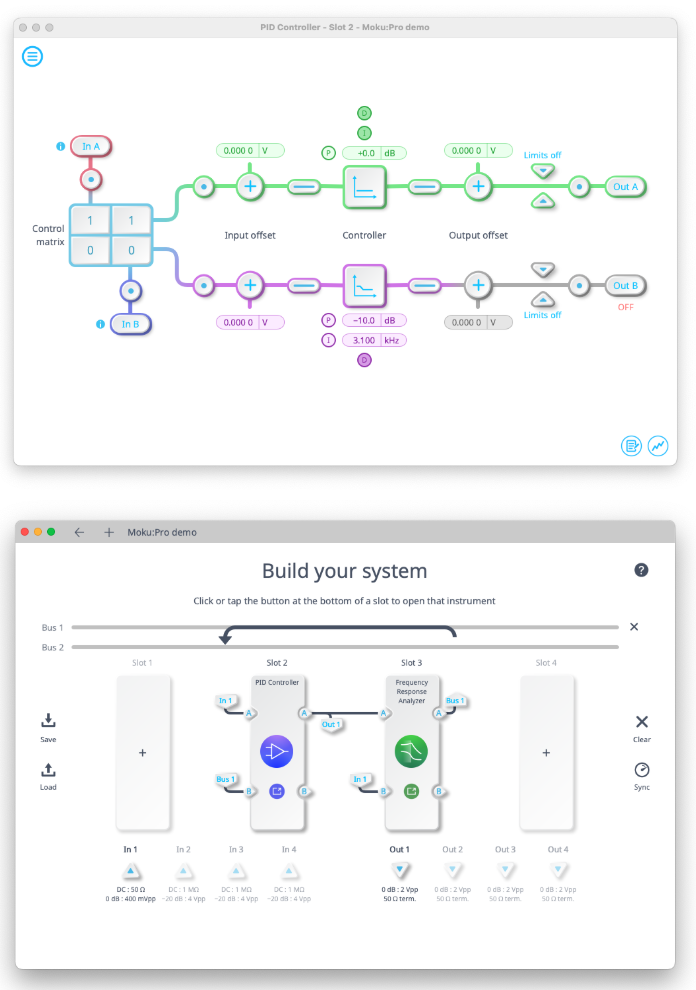
図4.3: Mokuの マルチインストゥルメントモード 周波数応答アナライザとPIDコントローラ機器を使用して、システムのオープンループ伝達関数を測定できます。上記のように構成すると、PIDコントローラは加算器の役割を果たして、励起信号を注入できるようになります。単純な加算ノードは、次のように構築することもできます。 Mokuクラウドコンパイル.
4.4 製品概要
ループ形状の最適化は、一般的に、フィードバック制御システムを作成する上で最も時間のかかる段階です。ただし、適切なモデルと、上記のプロセスを使用して作成された OLTF 測定を参考にすれば、盲目的に操作する必要はありません。付録 A に詳述されている基本機能のコレクションを使用して設計原則 (ノイズの多い周波数では高ゲイン、それ以外の周波数では低ゲイン、常に安定性に留意) を実装することは、成功するための実証済みの戦略です。
次に 第5部では、短期間は動作するがアクチュエータが飽和するとロックが失われるループを管理する方法について考えます。
付録A: 便利な表現
ここでは、読者がシステムをモデル化したり、コントローラの伝達関数を設計したりする際に役立つと思われる一連の式を示します。これらの式は評価され、図にプロットされています。 4.4ここで、\(omega_0\) コーナー周波数または中心周波数を角度単位で表します。無次元量 Q は、フィルタの全幅半値幅(FWHM)帯域幅 ∆ と \(Q = omega_0 / Delta\) を介して関連している。.
また、方程式の解は
\(s^2 + 左(オメガ0 / Q右)s + オメガ0^2 = 0\)
\(s = -frac{omega_0}{2Q} pm i omega_0 sqrt{1- left( frac{1}{2Q} right)^2}\).
- 極と零点
\(H_p(s) = frac{1}{1+s / omega_0}\)
\(Hz(s) = 1+s / omega_0\)
- 複素極と零点(2次)
\(H_p(s) = frac{omega_0^2}{s^2 + left(omega_0 / Qright)s + omega_0^2}\)
\(Hz(s) = frac{s^2 + 左(omega_0 / Q右)s + omega_0^2}{omega_0^2}\)
- ノッチ/共振ゲイン
\(H_{notch/res}(s) = frac{s^2 + left(omega_0 / Q_zright)s + omega_0^2}{s^2 + left(omega_0 / Q_pright)s + omega_0^2}\)
\(omega_0\)におけるフィルタのゲインまたは減衰 は\(Q_p/Q_z\)で与えられる とその Q はおよそ\(Q_p\).
- ハイパス
\(H_{hp}(s) = frac{s^2}{s^2 + 左(omega_0 / Q右)s + omega_0^2}\)
- バンドパス
\(H_{bp}(s) = frac{left(omega_0 / Qright)s}{s^2 + left(omega_0 / Qright)s + omega_0^2}\)
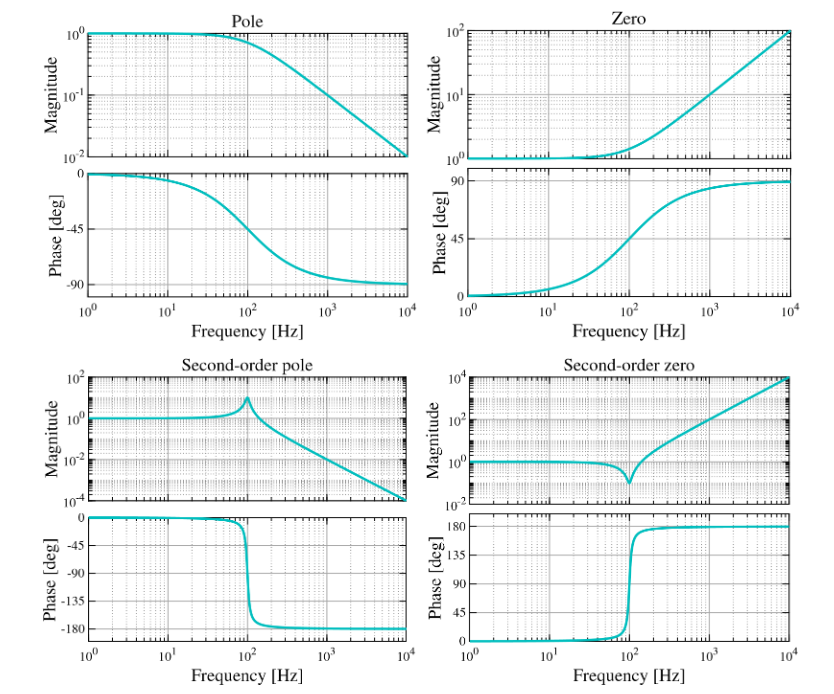
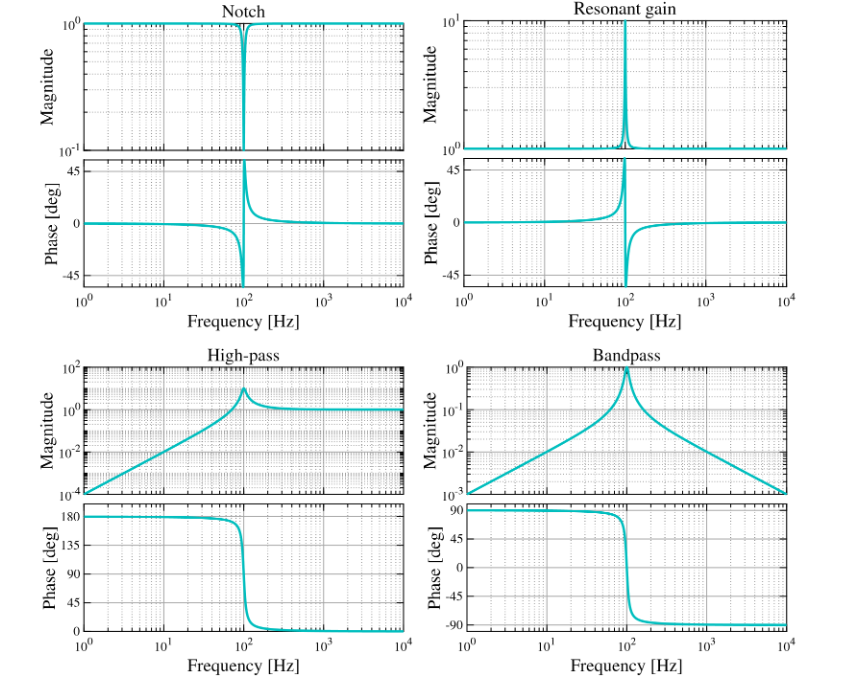
図4.4: 上で詳述した「有用な式」を任意に選択したパラメータ(\(omega_0\)に対してプロットしたもの =100 Hz、 Q = 10、ゲイン/減衰= 10)を使用して、関数形式を示します。

