



このシリーズでは、周波数領域で発生するフィードバック制御について簡単に紹介することで、ループの設計とデバッグに関する実用的なリファレンスを提供します。
5.1 イントロダクション
ループが閉じられ、必要なパフォーマンスが実現されても、短時間で制御が失われることがよくあります。このような状況でよくある原因は、アクチュエータの飽和です。これらの場合、アクチュエータは外乱の最高周波数要素を緩和するのに十分な「速度」を持っていますが、最低周波数成分に対処するために必要な絶対範囲がありません。
例えば、レーザーをキャビティにロックする場合、レーザーの 圧電モーター (PZT) は、最初はレーザーを共振状態に維持できます。しかし、環境の熱効果により、キャビティの長さが時間とともに増加します。その結果、PZT 制御信号の「DC」成分は、電子機器または PZT 自体が「レール」を外れてロックが失われるまで単調に増加します。周波数領域制御に関するシリーズのこの部分では、2 番目のアクチュエータを追加することでこの問題を解決する方法を検討します。
第1部 伝達関数の定義を確立し、複雑なシステムをモデル化するための制御ループブロック図を構築するためのコンポーネントを提供します。 第2部 フィードバック制御システムを使用して外乱を抑制したり、プロセス設定値を追跡したりする方法を説明します。ノイズの多いセンサーに関連する複雑さについても説明します。オープンループシステムとは異なり、フィードバック制御下のデバイスは不安定になる可能性があり、パフォーマンスと堅牢性の間に緊張関係があります。最終的には、信号伝播の遅延が最も厳しい制限を課す可能性があります。これらの問題は、 第3部周波数領域では、フィードバックシステムのほとんどのパラメータは、そのオープンループ伝達関数にリンクできます。 第4部 この重要な量を測定する方法を説明し、それを形作るためによく使用される関数のリストを提供します。ここでは、パート5でアクチュエータの飽和を回避するXNUMXつの方法を説明し、その際に複数のアクチュエータの取り扱いに役立つアイデアを紹介します。このシリーズの最後は 第6部 の研究により PIDコントローラーこの共通制御アーキテクチャは、通常、時間領域の観点から検討されますが、ここでは補完的な周波数領域表現を示します。
5.2 追加のアクチュエータ
このシナリオで明らかな選択肢は、飽和アクチュエータをより広い範囲を提供するアクチュエータに置き換えることです。一般的に、この戦略は失敗します。範囲が広がると速度が比例して低下するからです。しかし、この知識は別の解決策を示しています。つまり、より広い範囲を提供する 2 番目のアクチュエータでシステムを拡張し、速度は遅いものの、最低周波数での障害に対抗できるというものです。
このアプローチは図に示されている。 5.1一番上の図は 高速アクチュエータのみの初期ループ(伝達関数\(H_F\))が含まれています。高速コントローラとシステムセンサーには転送機能があります F の三脚と Sそれぞれである。このループはOLTF \(SFH_F\)で安定である。.
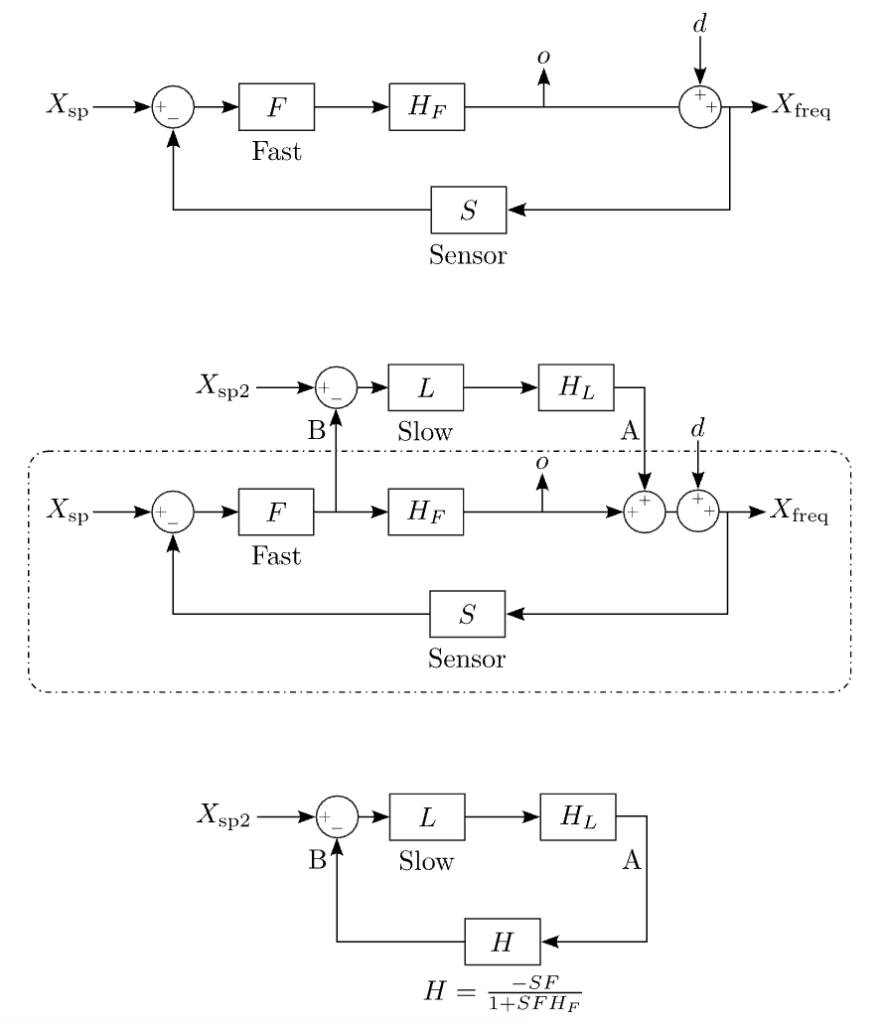
図 5.1: 上部: 初期の「高速ループ」。中央: 飽和を避けるために低速ループで拡張された高速ループ。下部: 高速ループをプラントと見なした等価ループ。
中央の図は、同じシステムに低速アクチュエータ(伝達関数 \(H_L\))と低速コントローラ(伝達関数 L)。この新しいパスは、高速アクチュエータの制御信号を入力として受け取ります。私たちの目標は、この信号を減らして飽和を回避することです。
5.3 視点の変化
追加した新しいパスの安定性とパフォーマンスを判断するには、視点を変える必要があります。高速ループ自体は安定しているので、 工場 新しい道のために。
上記の技術により、点間の伝達関数を計算します。 A の三脚と B そして、図の一番下の図に示すように、高速システムを単一のブロックに凝縮します。 5.1伝達関数は次のように表される。
\(H = frac{-SF}{1+SFH_F}\)
そして、新しい「低速」ループのOLTFは
\(G = frac{LH_L}{H_F}frac{-SFH_F}{1+SFH_F}\)。
低速ループは、最初の高速ループに比べてUGFが低くなります。高速ループのUGFより低い場合、\(-SFH_F/(1+SFH_F) sim -1\)したがって、低速ループの対象となる周波数では、
\(G sim -frac{LH_L}{H_F}\)、
この式は、通常通りスローループのパフォーマンスと安定性を判断するために使用できますが、次の点に注意してください。 L 通常、負帰還ループの位相に対応するために負のゲインが必要となる。 H.
5.4 彩度の低下
低速ループの当初の目的は、高速アクチュエータにかかる制御負荷を軽減することだったことを思い出してください。これを念頭に置いて、出力を調べます。 o 周波数変動に対する高速アクチュエータの応答 d (図を参照) 5.1).
元の高速経路が単独で作用すると、
\(o = frac{-SFH_F}{1+SFH_F}d sim – d\),
大まかに言えば、高速ループ帯域幅内では、高速アクチュエータが外乱の逆数を生成するため、出力は乱されません。
スローパスを追加することで、
\(o = frac{-SFH_F}{1+SFH_F-SFLH_L}d sim – frac{d}{G}\),
ここで、近似は低速ループの帯域幅内で有効です。したがって、低速ループがアクティブな周波数では、高速パスの出力は次のように減少します。 G、低速ループのゲイン。この低減された出力が高速アクチュエータの有効範囲内に収まる場合、飽和は回避され、長時間にわたって閉ループ動作が可能になります。
モク レーザーロックボックス 上記のアーキテクチャを使用して高速パスと低速パスを実装し、ユーザーがアクチュエータの不飽和化技術を簡単に導入できるようにします(図を参照)。 5.2).
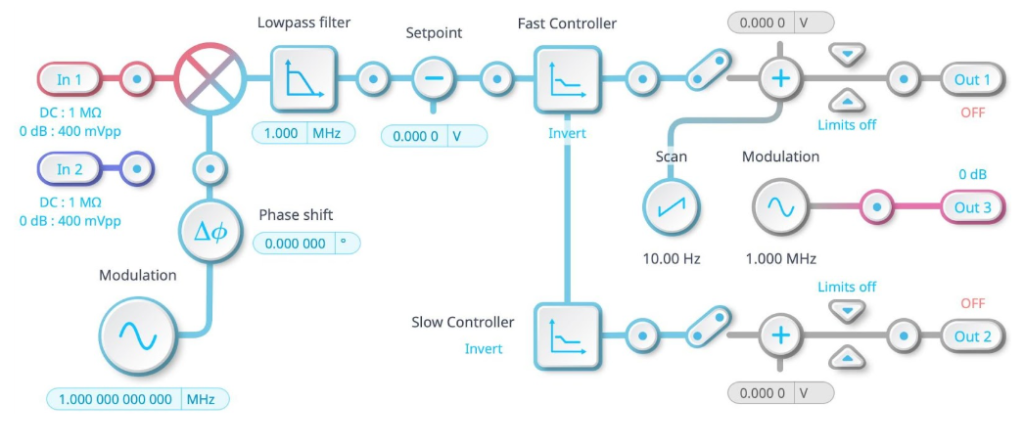
図5.2: もく レーザーロックボックス 高速および低速のフィードバック パスが含まれます。高速コントローラの出力は、低速コントローラの入力にルーティングされます。このアーキテクチャにより、高速パスの飽和を回避できます。
5.5 製品概要
上記では、異なる周波数帯域で有用なパフォーマンスを提供する 2 つのアクチュエータの組み合わせによって、アクチュエータの飽和の問題を軽減できることを示しました。重要な考え方は、以前の部分で紹介した数学的処理が柔軟であるということです。視点を変えて、フィードバック ループ全体を、より単純な制御システム ダイアグラム内の単なる別のブロックとして考えることができます。この概念は、より高速なアクチュエータを追加して帯域幅を増やしたい場合や、検討したカスケード アーキテクチャとは対照的に、複数のアクチュエータを並列で動作させている場合に適用できます。新しい、より単純なダイアグラムにより、既存のツールを使用して複合構成の安定性を簡単に調査することもできました。
次回、そしてシリーズの最後となる今回は、 第6部、私たちは常に存在するものに焦点を当てます PIDコントローラー.

