



このシリーズでは、周波数領域で発生するフィードバック制御について簡単に紹介することで、ループの設計とデバッグに関する実用的なリファレンスを提供します。
2.1 イントロダクション
のパート2 私たちのシリーズ 周波数領域制御に関するこの論文では、前述のブロック図アプローチを使用してフィードバック制御ループを構築する方法を説明します。 第1部 制御ループの数学的表現の概要については、こちらをご覧ください。これらのループを分析し、変化する設定点を追跡したり、外乱を軽減したりする方法について学習します。例として、ループ センサー自体から発生する外乱について見ていきます。
パート 1 では、伝達関数の定義を確立し、複雑なシステムをモデル化するための制御ループ ブロック図を作成するためのコンポーネントを提供します。パート 2 では、フィードバック制御システムを使用して外乱を抑制したり、プロセス設定値を追跡したりする方法を説明します。ノイズの多いセンサーに関連する複雑さについても説明します。オープン ループ システムとは異なり、フィードバック制御下のデバイスは不安定になる可能性があり、パフォーマンスと堅牢性の間に緊張関係があります。最終的には、信号伝播の遅延が最も厳しい制限を課す可能性があります。これらの問題は、 第3部周波数領域では、フィードバックシステムのほとんどのパラメータは、そのオープンループ伝達関数にリンクできます。 第4部 この重要な量を測定する方法を説明し、それを形作る際によく使用される関数のリストを示します。 第5部 アクチュエータの飽和を回避する方法の一つを説明し、その際に複数のアクチュエータを扱う際に役立つアイデアを紹介する。このシリーズの最後は 第6部 の研究により PIDコントローラーこの共通制御アーキテクチャは、通常、時間領域の観点から検討されますが、ここでは補完的な周波数領域表現を示します。
2.2 オープンループ
さあ、世界への旅を始めましょう 制御システム 図 2.1 の周波数制御システムを検討します。このような図は、電圧制御発振器 (VCO)、レーザー、またはモーター (この場合、周波数は回転速度と考えられます) の調整入力を表すことができます。制御されるシステムは、多くの場合、プラントと呼ばれます。

図 2.1: オープンループ周波数制御システム。 H(秒)は、Hz/Vの次元を持ち、システムのチューニング入力の伝達関数を表します。 セットポイント Xの入力sp出力周波数は\(X_{freq}\)、つまり\(X_{freq}(s)=H(s)X_{sp}(s)\)です。
理想的には、希望する出力周波数に基づいて入力電圧を固定し、必要に応じて変更するだけでよい。残念ながら、現実の世界では 騒動 このアプローチは実行不可能である。私たちは外乱を次のように分類する。 の三脚と 出力 (図を参照)に示すカテゴリに分類されます。 2.2).
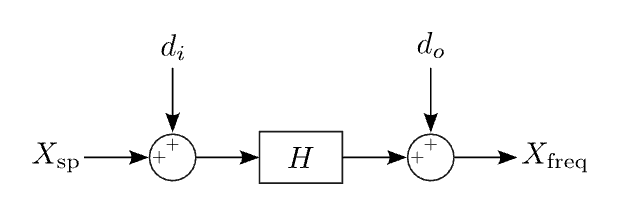
図 2.2: 入力外乱 di と出力外乱 do はそれぞれシステムを乱します。このため、望ましい出力を維持するためには、何らかの措置を講じる必要があります。簡潔さと読みやすさを考慮して、以降は次元と独立変数を省略します。
閉ループ制御では、入力外乱と出力外乱の影響は大きく異なる可能性があり、それらの区別は比較的微妙です。外乱の大きさと、問題の伝達関数によってフィルタリングする必要があるかどうかを考慮すると、通常は不確実性が排除されます。
2.3 フィードフォワード
妨害に対抗するための簡単な方法は次のようになります。
- このタイプの障害がシステムに与える影響を特徴付ける
- 乱れを正確に測定する
- 外乱の影響を打ち消すために設定点を調整する
図2.1のシステムが、例えば温度(図2.3、上)などの出力外乱によって変動したと仮定する。この外乱は、システムの温度応答R [Hz/K]を介して出力周波数を変化させる。その結果、出力は\(X_{freq}=HX_{sp}+Rd_o\)となる。
摂動を緩和するために、伝達関数S [V/K]を持つセンサーを使用して周囲温度を測定し、システムM [V/V]のモデルを実装します(図2.3、下)。モデルの出力をシステム入力から差し引くと、次の式が得られます。
\(X_{freq} = H X_{sp}+Rd_o-SMHd_o\)
\(=HX_{sp}+(R-SMH)d_o\)
したがって、 M = R/SH理論的には、システムから温度の影響を取り除くことができます。これが フィードフォワード コントロール。
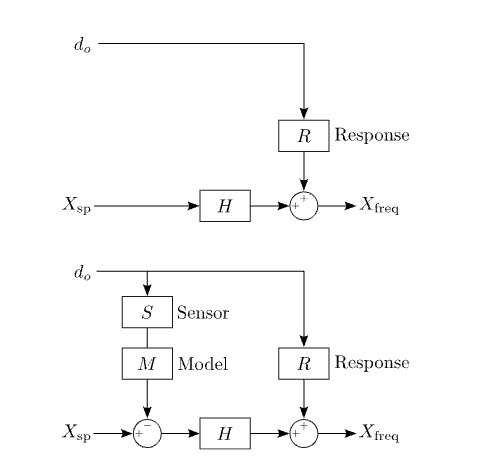
図 2.3: フィードフォワードは、外乱 (温度など) を測定し、それがシステムにどのような影響を与えるかを事前に把握することで、外乱の影響を打ち消すオープン ループ手法です。
フィードフォワードは、システム出力に影響を与える前に外乱を修正できる、強力で、一般的に安定したオープンループ技術です。ただし、フィードフォワードでは、プラントと外乱の両方の観点から、システムに関する正確な知識が必要です。システム内のモデル化されていない外乱や時間的変動は、パフォーマンスを大幅に低下させます。したがって、この技術は、外乱が準ランダムな環境の影響ではなく、設定点の変化やバルブの開閉などの予測可能な要因である、特性が十分にわかっている、主に工業的なプロセスに限定されることがよくあります。フィードバックと連動して操作すると、これらの欠点の一部を回避できますが、これはこの作業の範囲外です。
2.4フィードバック
障害の治療に対する代替アプローチは、
- システム出力を測定する
- 出力を希望値と比較する
- 希望の出力が得られるまで設定点を調整する
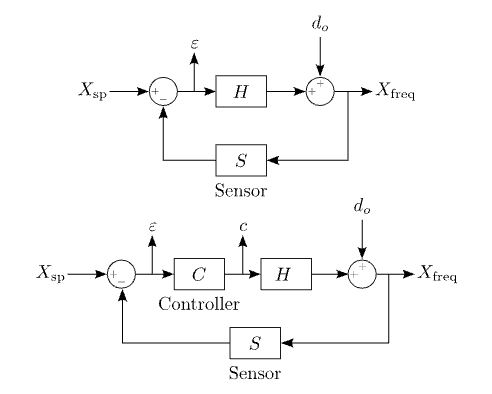
図 2.4: フィードバックによる出力障害への対処。
このようなアプローチは、図2.4の上の図に示されています。出力から時計回りに移動するX周波数出力は伝達関数 S を持つセンサーによって測定され、センサー出力と要求された設定点の差が加算ノードで計算されます。この差をエラー信号 ε と呼びます。エラー信号はシステムへの入力として取り込まれます。出力が設定点と一致する場合、エラー信号はゼロになり、システムの出力は変更されません。出力が目的の設定点より大きい場合、エラー信号は負になり、出力を減らすように動作します。同様に、出力が小さすぎる場合、制御ループは出力を増やすように動作します。
この負帰還ループは、一般的には安定ではない(§3.2参照)。安定性を確保し、周波数依存の閉ループゲインを変更できるようにするために、 コントローラ、伝達関数C(図2.4、下)で表されます。コントローラの出力cは制御信号と呼ばれ、この量がシステムに作用します。定常状態の出力は次のように表されます。
\(X_{freq} = d_o+CHvarepsilon\ =d_o+CH(X_{sp}-SX_{freq}).\)
\(X_{freq} = frac{1}{1+CHS}d_o+frac{CH}{1+CHS}X_{sp}\) (2.1)
項を整理すると、(2.1)式が得られます。ここで、任意の時点でループを切断し、(現在開いている)ループを移動するときに遭遇するすべての伝達関数の積を取ることによって得られるオープンループ伝達関数、つまりOLTF、Gを導入しています。この例では、G = CHSです。
伝達関数の分子は入力から出力へ移動する際に遭遇するブロックを含み、分母は 1+G であることに注意してください。この実現により、検査によって伝達関数を構築する手段が提供されます。
(2.1)の研究により、フィードバック制御ループのXNUMXつの重要な特徴が明らかになる。
参照追跡: 設定点とセンサ出力間の伝達関数は
大きいGに対して、\(frac{S X_{freq}}{X_{sp}}=frac{G}{1+G} sim 1\)。
測定されたシステム出力が所望の出力(設定点)に追従するようにする。 G は「大きい」です。 ユニティゲイン周波数または ωUGF の、その頻度は次のようになります |G| = 1. 大まかに言えば、実際には追跡は ω < ωUGF の.
妨害除去: 外乱から出力までの伝達関数は
\(frac{X_{freq}}{d_o}=frac{1}{1+G} sim frac{1}{G}\) 大きなGの場合.
したがって、外乱は約1倍抑制される。/G.
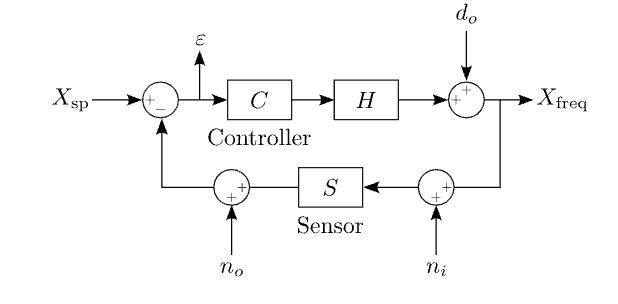
図2.5: 入力、ni、出力noセンサーノイズはループのパフォーマンスを直接制限します。
2.5 センサーノイズ
上記の手順を繰り返すことで、ループ内の任意のポイントで発生する外乱の影響を計算できます。ただし、特に注目すべき外乱が 1 つあります。それはセンサー ノイズです。
図2.5に示すように、XNUMX種類のセンサーノイズを考慮することができます。XNUMXつ目は入力ノイズ、ni、これはレーザー周波数安定化セットアップにおけるキャビティ長ノイズなどのセンサーの伝達関数を体験します。2番目は出力ノイズ、no、そうではありません(例:ほとんどの電子機器のノイズ)。
システムの理想的なイメージがノイズの多いセンサーによって損なわれると、制御目標を達成する能力が損なわれるのは当然です。この仮定は、センサーノイズとシステム出力を関連付ける次の伝達関数によって裏付けられています。
\(X_{freq}=-frac{CH}{1+G}n_o-frac{G}{1+G}n_i\) (2.2)
センサー ノイズからシステム出力への明確な経路があることがわかります。特に入力センサー ノイズの場合、結合は 1:1 で、オープン ループ ゲインは高くなります。この考えを固めるために、常に 21 度高い値を示す温度センサーの例を考えてみましょう。設定点が 21 度の場合、ループはセンサー出力を 20 度にするように動作します。ただし、センサー エラーのため、実際の部屋の温度は XNUMX 度になります。XNUMX 度のセンサー エラーは、制御変数に直接伝達されます。
フィードバック制御ループを使用して期待できる最善のことは、外乱をセンサー ノイズまで抑制することです。明らかなように思われるかもしれませんが、オープン ループ システムはセンサー ノイズの影響を受けないことを明示的に述べる価値があります。
センサーノイズに関する10つ目の問題は、性能評価を試みる際に発生します。ループはセンサーノイズと真のセンサー出力を区別しないため、ループはシステム出力にセンサーノイズを付加し、「測定時の」変動を低減します。例えば、センサーが10Hzのノイズ振動の影響を受けている場合、ループはシステム出力をXNUMXHzで振動させ、センサー出力が平坦になるようにします。つまり、ループはセンサー出力におけるセンサーノイズを抑制していることになります。その後、ループ内のセンサーを用いて性能評価を行うと、出力が平坦であることが確認され、出力が安定していると想定されますが、実際にはそうではありません。このため、独立した ループ外 こうした種類の問題を検出できるセンサーがよく使用されます。
2.6 製品概要
上記ではフィードバック制御ループの基本的な特徴をいくつか紹介しました。 フィードフォワード ループ、フィードバック ループはパラメータの変化に対して堅牢であり、各外乱の原因と結合についての知識を必要としません。さらに、良好なパフォーマンスを達成するためにプラントの理想的なモデルも必要ありません。ただし、安定性は保証されておらず、このトピックは次回のテーマになります。 第3部.

