



このシリーズでは、周波数領域で発生するフィードバック制御について簡単に紹介することで、ループの設計とデバッグに関する実用的なリファレンスを提供します。
1.1 イントロダクション
異星でヘリコプターを操縦する興奮から、電力網や家庭暖房といった日常の不可欠な用途まで、フィードバック制御システムは現代社会に必要不可欠な、いたるところに存在するものです。研究や産業では、制御ループによって自動化、ノイズの低減、パフォーマンスの向上、不確実性やパラメータの変動への対処が可能になります。しかし、複雑さや不安定性の可能性に関する付随的な懸念にも対処する必要があります。
このシリーズの第1回目では、伝達関数の定義を確立し、複雑なシステムをモデル化するための制御ループブロック図を構築するためのコンポーネントを提供します。 第2部 フィードバック制御システムを使用して外乱を抑制したり、プロセス設定値を追跡したりする方法を説明します。ノイズの多いセンサーに関連する複雑さについても説明します。オープンループシステムとは異なり、フィードバック制御下のデバイスは不安定になる可能性があり、パフォーマンスと堅牢性の間に緊張関係があります。最終的には、信号伝播の遅延が最も厳しい制限を課す可能性があります。これらの問題は、 第3部周波数領域では、フィードバックシステムのほとんどのパラメータは、そのオープンループ伝達関数にリンクできます。 第4部 この重要な量を測定する方法を説明し、それを形作る際によく使用される関数のリストを示します。 第5部 アクチュエータの飽和を回避する方法の一つを説明し、その際に複数のアクチュエータを扱う際に役立つアイデアを紹介する。このシリーズの最後は 第6部 の研究により PIDコントローラーこの共通制御アーキテクチャは、通常、時間領域の観点から検討されますが、ここでは補完的な周波数領域表現を示します。
1.2 なぜ周波数領域なのか?
単一入力単一出力(SISO)の線形時間不変動的システムは、主に次の形式の入力/出力微分方程式で記述される。
\(a_nfrac{d^ny}{dt^n}+ a_{n-1}frac{d^{n-1}y}{dt^{n-1}}+ldots+ a_1frac{dy}{dt}+a_0y= b_mfrac{d^mu}{dt^m}+ b_{m-1}frac{d^{m-1}u}{dt^{m-1}}+ldots+ b_1frac{du}{dt}+b_0u,\).
コラボレー u(t)は入力関数であり、 y(t)出力と\(a_i, b_iin mathbb{R}\) は定数です。
このような方程式を直接解くのは難しい場合があります。ラプラス変換とその特性(付録を参照)を利用することで、 A) では、純粋に代数的な解が可能な周波数領域に移行することができます。
さらに、周波数領域での操作により、複雑なシステムを構築および分析するための簡単な方法が可能になり、閉ループ安定性に関連する概念をより簡単に扱い、理解できるようになります。
1.3 伝達関数とは何ですか?
(1.1)のラプラス変換をとると、
\((a_ns^n+ a_{n-1}s^{n-1}+ldots+a_1s+a_0)Y(s) = (b_ms^m+ b_{m-1}s^{m-1}+ldots+b_1s+b_0)U(s)\),
ここで、Y(s)とU(s)は周波数領域における新しい出力関数と入力関数である。入力信号に対するシステムの応答のみを考えるため、システムは\(t=0^-\)において不摂動であると仮定する。つまり\(y(0^-),dot{y}(0^-),text{etc}=0\)である。また、t < 0において入力u(t)はゼロであり、\(u(0^-),dot{u}(0^-),text{etc.}=0\)であると仮定する。この静的初期条件による設定は、零状態応答と呼ばれることもある。伝達関数H(s)を、出力と入力の比として定義する。
この式のよく見られる別の形式は
\(H(s) = frac{N(s)}{D(s)}= K frac{(s-z_1)(s-z_2) ldots (s-z_{m-1})(s-z_m)}{(s-p_1)(s-p_2)ldots(s-p_{n-1})(s-p_n)}\).
このバージョンは、分子と分母の多項式を根の形に並べ替えたもので、零点-極-ゲイン表現または zpk 表現として知られています。システムの零点は N(s) = 0 の根であり、システムの極は D(s) = 0 の根です。
(1.1)の係数は実数なので、極と零点は実数か複素共役対として現れる。
伝達関数が与えられれば、微分方程式表現を使用した場合と同様に、任意の入力に対するシステムの応答を計算できます。伝達関数は、正弦波入力に対する定常応答を振幅と位相の両方の観点から評価するためによく使用されます。この周波数応答は、s = iω で伝達関数を評価することによって計算できます。
1.4 ループ代数
このシリーズの次の部分では、ブロック図を使用してシステムを表します。各ブロックは伝達関数を表し、代数的に組み合わせて任意の複雑なシステムにすることができます。直列接続、並列接続、加法接続などの基本的な例を図 1.1 に示します。
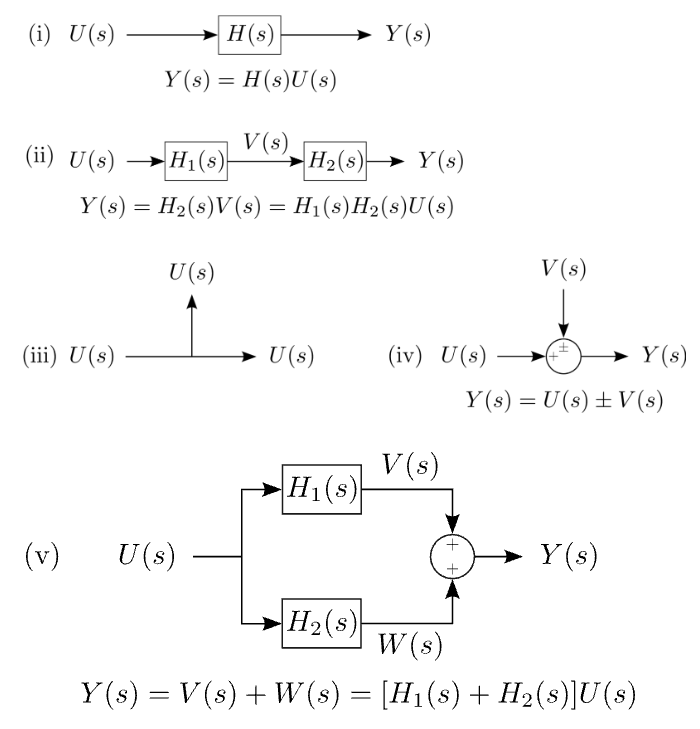
図 1.1: 複雑なシステムの伝達関数は、基本コンポーネントから代数的に構築できます。(i) 単一ブロック、(ii) 直列接続、(iii) ピックオフ ポイント、(iv) 加算ノード、(v) 並列接続。
付録A: ラプラス変換
一方的な ラプラス変換 is \(F(s)=int_{0^-}^infty f(t)e^{-st},mathrm{d}t\)
ここに s = σ + えー は複素周波数であり、 σ の三脚と ω は現実であり、私たちは暗黙のうちに f(t) = 0 の場合 t 0. 異常な下限 t = 0 - 、つまり直前 t = 0は計算を簡略化するために採用されている。別のアプローチとしては、 t = 0であるが、入力関数の不連続性は t = 0+.
ラプラス変換とフーリエ変換の関係は次のように特徴付けられる。
ある意味では、 フーリエ変換 はラプラス変換の特別な場合であり、 σ=0, そして、この条件下で与えられた制御システムの定常応答を評価します。単位ステップなどの制御理論におけるいくつかの重要な関数には、ラプラス変換がありますが、フーリエ変換はありません。

