安定性測定
特にパワーエレクトロニクスにおけるフィードバックループは、その安定性という観点から特性評価を行う必要があります。これは、システムが期待通りに動作するかどうかを判断します。ループの動作を測定することで、周波数クロスオーバー、ゲインマージン、位相マージンなどのパラメータを調べることで安定性を評価し、それに応じてループ調整パラメータを調整することができます。
安定性は通常、周波数応答アナライザまたはベクトルネットワークアナライザを使用して、ボード線図からループゲインと位相を測定することによって評価されます。Moku:Pro 周波数応答アナライザ 最大 4 つの注入 AC 信号をテスト対象デバイス (DUT) に出力し、同時に 4 つの応答信号を取り込んで、出力注入信号に対するゲインと位相をプロットできます。
ループゲインを測定する最も伝統的かつ簡単な方法は、制御ループ回路に侵入し、フィードバックパスに直列に接続された注入抵抗に外乱を注入することです。抵抗の片側はフィードバックループに接続し、もう片側はレギュレータの応答に接続します。これらの2つの電圧(出力/入力)の比を周波数応答アナライザで解析することで、ゲインと位相余裕を測定し、安定性を評価することができます。
この方法の主な欠点は、注入抵抗を挿入するために制御ループ回路を物理的に切断する必要があることです。これは、パッケージ化されたICや高密度のPCBなどの完全に密閉されたシステムなど、ループに直接アクセスできない状況では必ずしも現実的ではありません。さらに、既に設計・組み立てられたデバイスに配線を持ち上げたり、部品を追加したりすることが現実的でないことも少なくありません。
物理的なループの中断を回避する別の方法は、閉ループ回路の出力インピーダンスから位相余裕を導出することです。この方法は、非侵襲的安定性測定(NISM)と呼ばれ、出力インピーダンスの振幅と位相のプロットから算出される品質係数(Q)を用いてループの位相余裕を計算します。
NISM法 – 二次システム
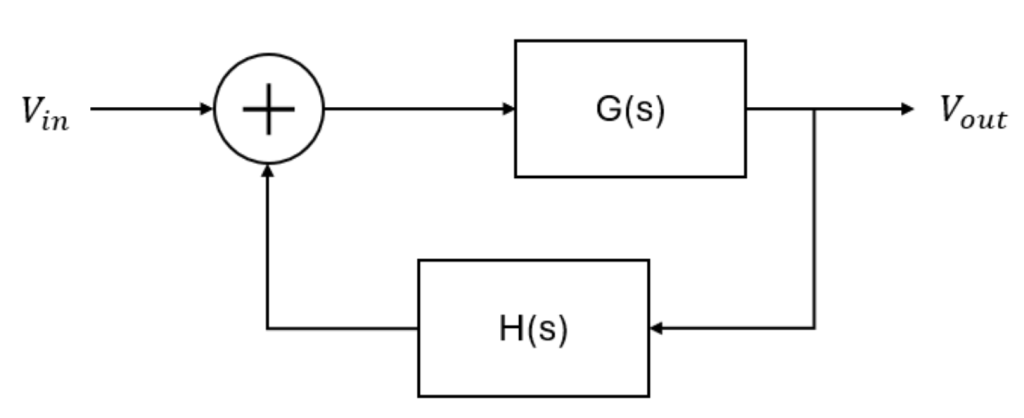
制御フィードバックループは、安定性、減衰、過渡応答など、システム動作の最も重要な側面をダイナミクスで捉えるため、多くの場合、2次システムとしてモデル化されます。現実世界のシステムの多くは、技術的には高次です。しかし、それらの動作は、多くの場合、s平面において他のすべての極よりも虚軸に近い一対の複素共役極によって支配されます。これらは支配極と呼ばれます。このような場合、システムは2次モデルで正確に近似できるため、全体的な動作に関する重要な情報を失うことなく、解析が容易になります。図1は、一般的な制御フィードバックシステムの図を示しています。ここで、\(G(s)\)はプラントとコントローラの伝達関数、\(H(s)\)はフィードバック伝達関数を表しています。\(G(s)\)は式1で定義されています。標準的なループ代数を使用して、式2に示す閉ループ伝達関数を取得します。
\(G(s) = \frac{V_{out}}{V_{in}+V_{out}H(s)}\) (1)
\(\frac{V_{out}}{V_{in}} = \frac{G(s)}{1+H(s)G(s)}\) (2)
2次システムの場合、式1は式3[1、式(6.29)]に示す標準標準形で表すことができます。
\(G(s) = \frac{\omega_n^2}{s(s+2 \zeta \omega)}\) (3)
ここで、\(\omega_n\) は固有振動数、\(\zeta \) は減衰比です。
フィードバック伝達関数が1(ユニティフィードバック)と仮定すると、閉ループ伝達関数(式2)は[1、式(6.30)]になります。
\(T(s) = \frac{V_{out}}{V_{in}} = \frac{\omega^2_n}{s^2 + 2 \zeta \omega_n s + \omega_n^2}\) (4)
これは2次システムの標準的な伝達関数方程式です。この方程式から、システムの共振性能を示す指標である品質係数Qを計算できます。まず、式4の分母に二次方程式の公式を適用して極を求めます。結果は次のようになります。
\(s = -\zeta \omega_n \pm j \omega_n \sqrt{1-\zeta^2}\)
品質係数は次のように計算できます。
\(Q = \frac{\omega}{2 \sigma}\)
ここで、\(\omega\)は振動角周波数、または極の虚数部\((\omega_n \sqrt{1-\zeta^2})\)であり、σは振動の減衰率、または極の実数部\((\zeta \omega_n)\)です。式5の実数部と虚数部を式6に代入すると、次の式が得られます。
\(Q = \frac{\sqrt{1-\zeta^2}}{2 \zeta}\)
\(\zeta \ll 1\)のとき、
\(Q \sim \frac{1}{2 \zeta}\)
Qと減衰比の関係は明らかになりましたが、システムの減衰比を直接測定することはできません。しかし、出力インピーダンスのゲインと位相を測定することで、群遅延(\(\tau_g\))などのパラメータを得ることができます。群遅延は、信号エンベロープがシステムを通過する際の時間遅延です。群遅延は、位相応答の負の傾きとして定義されます。
\(\tau_g(\omega) = \frac{d \phi (\omega)}{d \omega}\) (9)
ここで\(\phi (\omega)\)はラジアン単位の位相です。共振点では位相が急速に変化するため、共振点における群遅延信号にピークが現れると考えられます。これにより共振周波数と\(\tau_g\)が得られます。
\(\phi (\omega) = \arg{(T(j\omega))} = \arg{\left( \frac{\omega^2_n}{\omega^2_n – \omega^2 + j 2 \zeta \omega_n \omega} \right) } = -\arctan{\left( \frac{\omega_n \omega}{Q(\omega_n^2 – \omega^2)}\right)}\) (10)
共振周波数では、共振時の群遅延は減衰比と固有周波数の逆数に等しいことが数学的に証明できます。
\(\tau_g(\omega) = -\frac{d \phi(\omega)}{d \omega} = \frac{1}{1+\left( \frac{\omega_n \omega}{Q(\omega_n^2 – \omega^2)}\right)}\left( \frac{\omega_n}{Q(\omega_n^2 – \omega^2)} + \frac{2 Q \omega_n \omega^2}{Q^2(\omega_n^2 – \omega^2)^2} \right)\)
\(= \frac{Q \omega_n (\omega_n^2 + \omega^2)}{Q^2(\omega_n^2 – \omega^2)^2 + \omega^2_n \omega^2}\)
\(\tau_g(\omega_n) = \frac{1}{\zeta \omega_n}\) (11)
伝達関数\(T(j \omega)\)の分母\(D\)を最小化する周波数\(\omega_{res}\)を見つけるには、\(D\)について微分し、それをゼロに設定します。
\(|T(\omega)|^2 = \frac{\omega_n^4}{(\omega_n^2 – \omega^2)^2 + 4 \zeta^2 \omega_n^2 \omega^2}\) (12)
\(\frac{dD}{d \omega} = \frac{d}{d \omega}[(\omega_n^2 – \omega^2)^2 + 4 \zeta^2 \omega_n^2 \omega^2] = 0\) のとき \(\omega = \omega_{res}\) (13)
\(\omega_{res} = \omega_n \sqrt{1-2 \zeta^2} \approx \omega_n\) のとき \(\zeta \ll 1\) (14)
式8を式11に代入すると、品質係数、群遅延、共振周波数の間に直接的な関係が得られます。
\(Q = frac{|\tau_g(\omega_{res}) \ 回 \omega_n|}{2} = |\tau_g(f_{res}) \ 回 f_{res} \ 回 \pi|\) (15)
周波数応答アナライザを使用してゲインと位相データから群遅延と共振周波数を測定し、Qを計算することができます。位相余裕を計算するには、式13 [1、式(6.31)]の既知の関係を使用します。
\(\phi_m = \arctan{\left( \frac{2 \zeta}{\sqrt{\sqrt{1+4 \zeta^4} -2 \zeta^2}} \right)}\) (16)
式8を式16に代入すると、Qから位相余裕を計算できます。
\(\phi_m = \arctan{\sqrt{\frac{1+\sqrt{1+4Q^2}}{2Q^4}}}\) (17)
レギュレータの測定された出力インピーダンスからのゲインと位相のプロットを使用して、式 15 と 17 を使用して閉ループ システムの位相マージンを計算できます。出力インピーダンスは制御ループ回路を開かずに測定できるため、非侵襲的な安定性評価が可能になります。
安定性評価
制御システムの安定性は、通常、ゲイン余裕と位相余裕によって示されます。ゲイン余裕とは、不安定性が生じる前にゲインをどれだけ増減できるかを表します。図2に示すように、ボード線図では、振幅曲線と0dBライン(振幅=1)間の垂直距離が、位相が-180°となる周波数で測定されます。
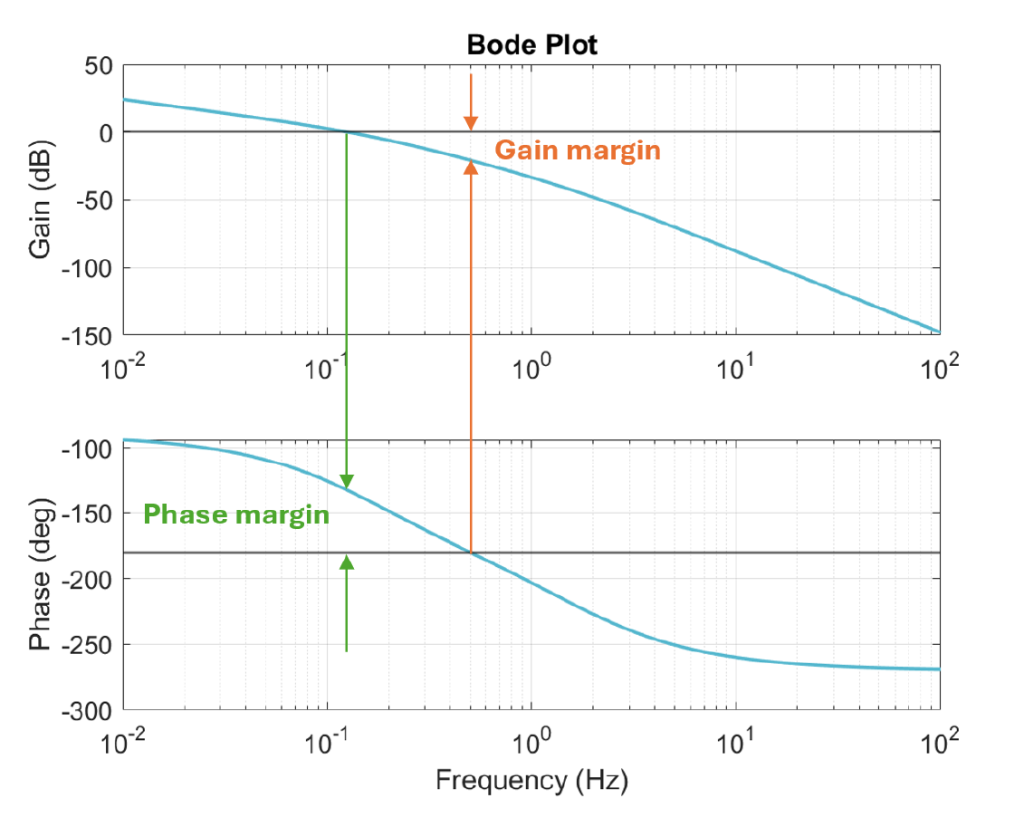
位相余裕は、システムが位相に関して不安定な点からどれだけ離れているかを示します。ボード線図上では、振幅が1(または0 dB)となる周波数(クロスオーバー周波数とも呼ばれます)における位相曲線から位相値 -180˚までの垂直距離です(図2を参照)。安定性を確保するには、位相余裕は正でなければなりません。実際には、必要な位相余裕はシステム設計によって異なりますが、十分な安定性を得るために一般的に受け入れられている最小値は約30˚です。経験則として、位相余裕が大きいほど安定性は高くなりますが、余裕が大きすぎると応答性が低下する可能性があります。応答性はクロスオーバー周波数を調べることでさらに評価できます。
NISMなどの実用的な測定環境では、出力インピーダンスは位相余裕の概算に使用されますが、ゲイン余裕は提供されません。位相余裕は通常、安定性評価の主要な指標です。これは、システムの減衰特性に関する情報を直接提供し、過渡特性に関する十分な洞察を与えるためです。過渡特性は最終的に安定性の重要な基準となります。
実験装置
従来の安定性測定:
図3は、従来の安定性測定を行うための機器構成図を示しています。評価対象となるデバイスは、Picotest社の電圧レギュレータボード(VRTS 1.5)です。このレギュレータボードはDC電源(7VDC)から電力を供給されます。ボード上部には、注入抵抗を挟んで2つのボード線注入点があります。Moku周波数応答アナライザは、注入トランス(Picotest J2101A)にAC信号を送信し、注入抵抗に正弦波の摂動信号を印加します。周波数応答アナライザの2つの入力はそれぞれ、注入前と注入後の応答に対応するボード線注入点に接続されています。
レギュレータボードには、2つの100μFコンデンサと出力負荷抵抗を制御する3つのオンボードスイッチが搭載されています。コンデンサの1つはアルミ電解コンデンサ、もう1つはタンタルコンデンサです。コンデンサの材質が異なるため、等価直列抵抗(ESR)は大きく異なります。アルミ電解コンデンサは、タンタルコンデンサに比べてESRがはるかに高いです。出力負荷抵抗は、従来の安定性測定では25mAの負荷電流を得るために有効にし、NISMでは電流インジェクタが既に25mAの負荷電流を流しているため無効にしました。測定は、各コンデンサを個別に接続し、一方を有効にし、もう一方を無効にすることで行いました。これらの測定は、従来の安定性測定と非侵襲的な安定性測定の両方で実施されました。
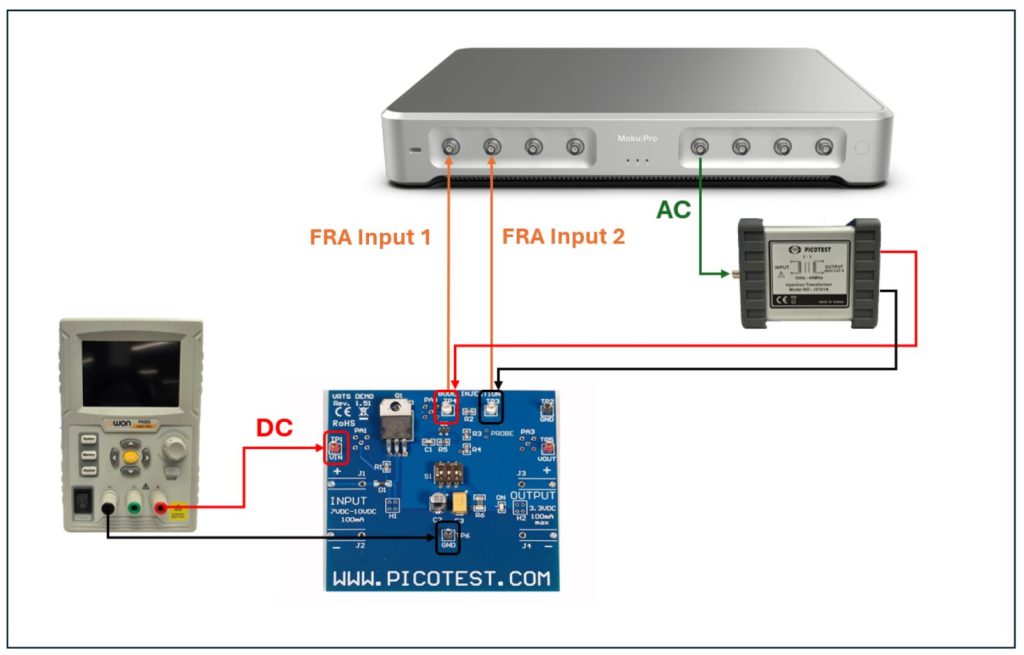
図3:従来の安定性測定システムの図。Picotest VRTS 1.5レギュレータボードは、DC電源から7VDCを入力します。周波数応答アナライザからのAC信号は、Moku:Proの出力1から出力され、注入トランス(Picotest J2101A)の入力に入ります。注入トランスの出力の摂動信号は、レギュレータボードのボード線図注入ポイントに注入されます。Moku:Proの入力1と2は、それぞれボード線図注入ポイントの1つに接続されています。
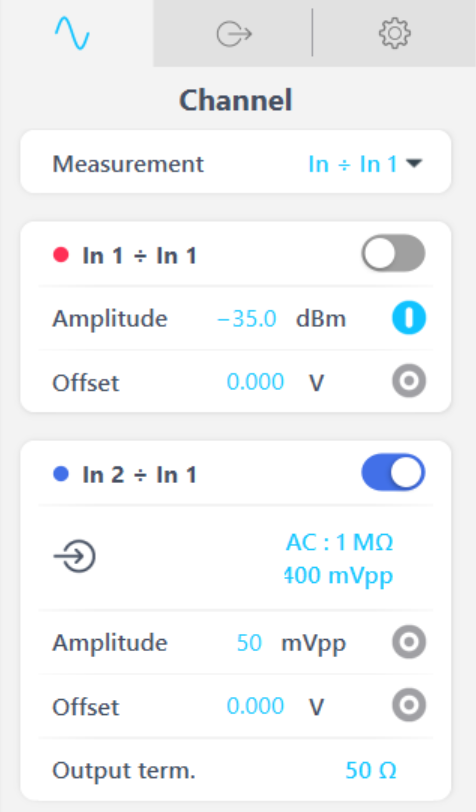
周波数応答アナライザの設定は図4に示すように構成されています。入力2の信号を入力1で除算し、注入抵抗前後の電圧比をプロットします。周波数応答アナライザが注入抵抗に摂動信号を注入すると、同じ注入ポイントにおけるゲインと位相のデータがプロットされます。振幅は-35dBmに設定されています。これは、振幅が大きいとレギュレータの応答が非線形になり、ゲインと位相の曲線が歪むためです。そのため、注入信号の振幅は、応答が振幅の影響を受けなくなるまで低減されました。
非侵襲的安定性測定
図5は、非侵襲性安定性測定を行うための機器構成図です。同じ電圧レギュレータ基板を使用し、同じDC電源(7VDC)から電力を供給しています。周波数応答アナライザの出力1からの摂動信号は、電流インジェクタ(Picotest J2111B)の入力に送られます。電流インジェクタは、安定化アダプタ(Picotest J2171A)を介して標準の壁コンセント電圧(120VAC)から電力を供給されています。
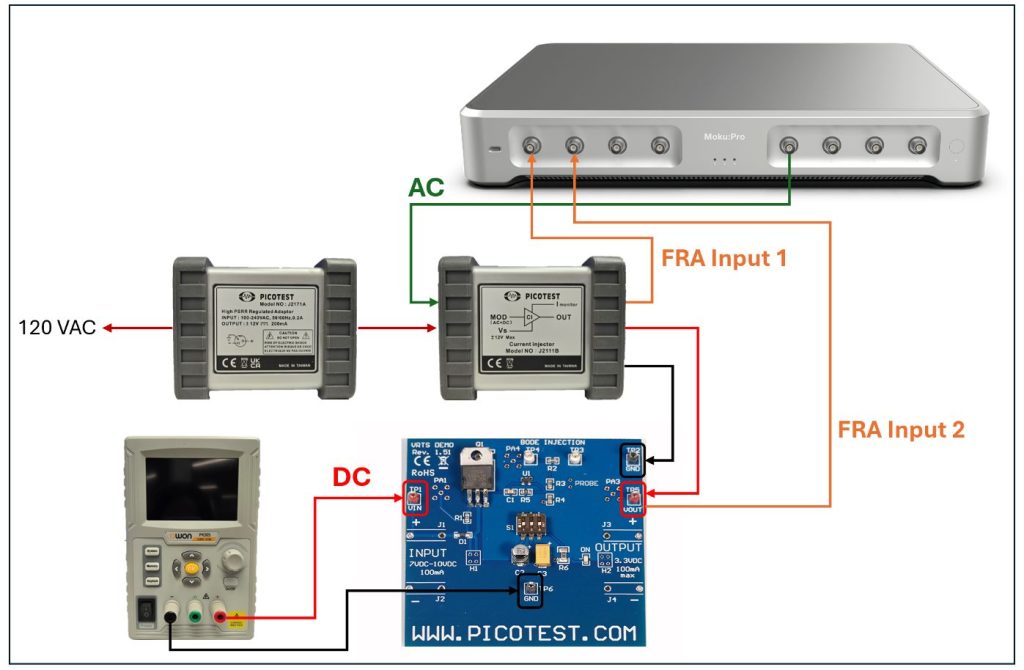
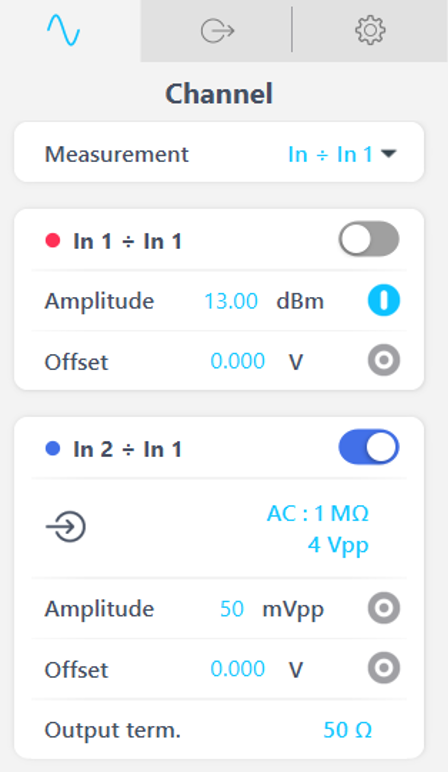
電流インジェクタの出力は、レギュレータボードの出力に接続される摂動信号です。レギュレータの出力は、インピーダンスの測定にも使用されます。インピーダンスは、出力電圧をインジェクタ出力の電流で割ることで算出されます。この測定を行うには、周波数応答アナライザの入力1を電流に接続し、入力2をレギュレータの出力電圧に接続します。下の図6は、レギュレータの出力インピーダンスを測定するための周波数応答アナライザの設定を示しています。NISM測定の振幅は、従来の方法よりも大きくなります。これは、群遅延から共振を正確に検出するために十分なSNRを実現するために、摂動を大きくする必要があるためです。
結果
図7と図8は、それぞれタンタルコンデンサとアルミ電解コンデンサを有効にした従来の安定性測定セットアップ(図3参照)のゲインプロットと位相プロットです。各プロットは、Mokuアプリの周波数応答アナライザーからmatfileとしてエクスポートし、MATLABでプロットしたものです。
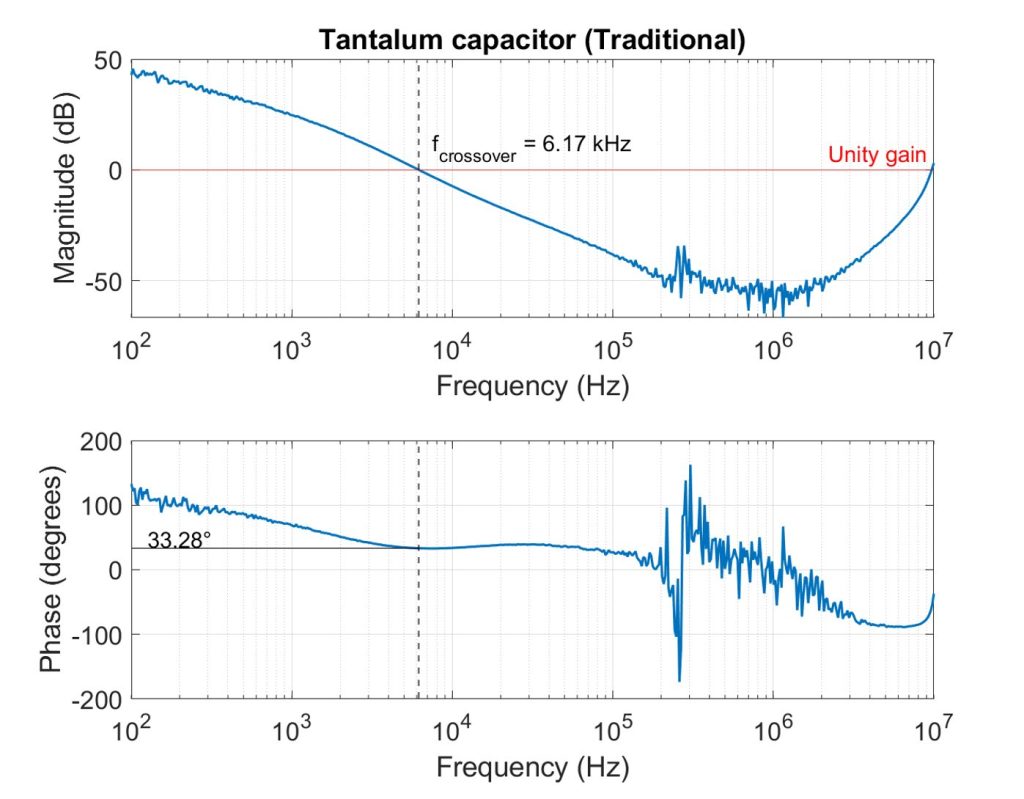
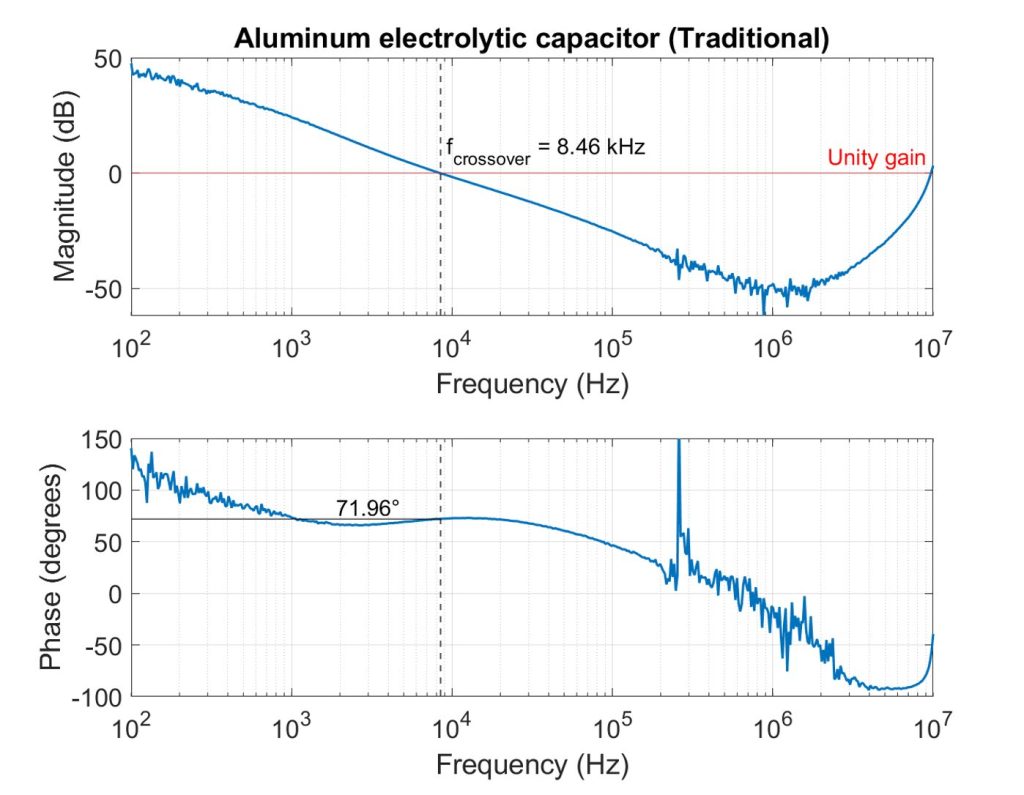
各プロットにおいて、振幅プロットのクロスオーバー周波数を見つけることで位相余裕を決定します。これは、振幅がユニティゲイン値(0dB)を横切る周波数です。このクロスオーバー周波数における位相値が位相余裕です。
タンタルコンデンサのクロスオーバー周波数は6.17kHzで、位相余裕は33.28˚でした。アルミ電解コンデンサはクロスオーバー周波数が8.46kHzと高く、位相余裕は71.96˚と高くなっています。アルミ電解コンデンサのESRが高いため、ESRによって生じるゼロ点がより低い周波数にシフトし、ゲインクロスオーバー前に位相進みが生じます。これにより振幅応答の傾きも小さくなり、ループがより高い周波数でユニティゲインを横切ることが可能になりました。
図9と図10は、それぞれタンタルコンデンサとアルミ電解コンデンサを有効にした制御ループの振幅応答と位相応答を示しています。これらの測定は、図5に示すセットアップを用いて非侵襲的に実施されました。
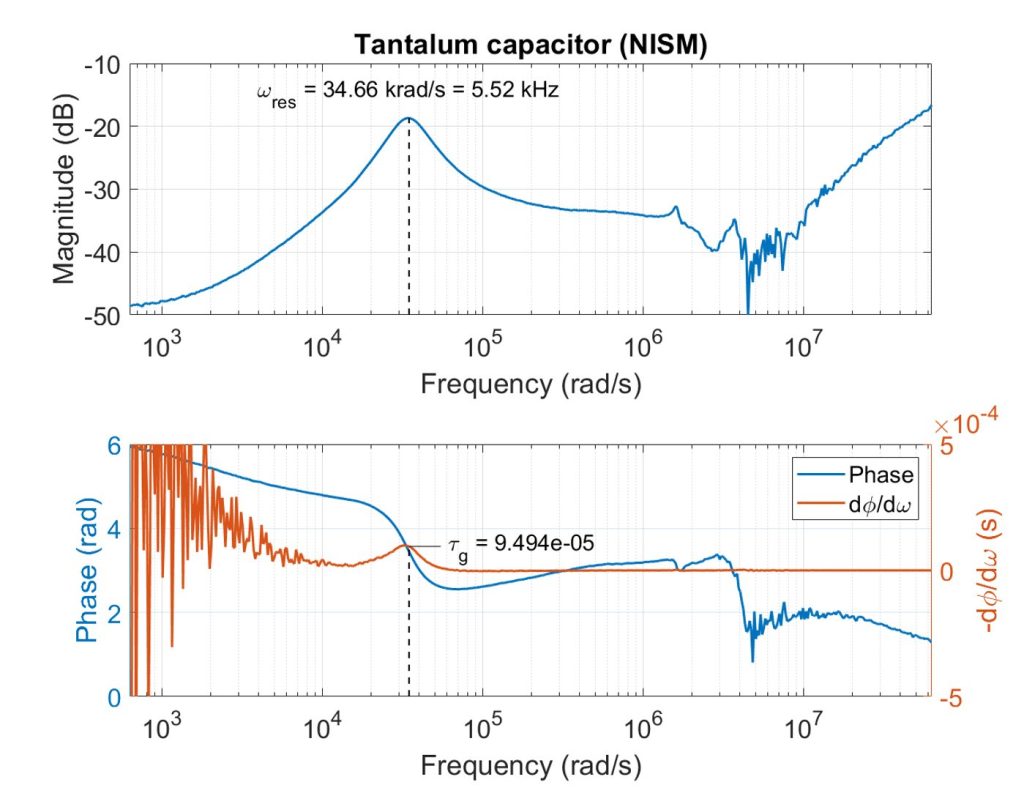
図9では、振幅プロットにおいて5.52kHzに共振ピークが見られます。位相データについては、角周波数に対する位相の負の微分をとることで群遅延を計算し、位相データを重ねてプロットしました。群遅延のピークは共振ピークと同じ周波数で発生しており、これは共振付近では位相変化がより急激になると予想されるため、理にかなっています。共振時の群遅延は94.94マイクロ秒です。これらの共振周波数と共振時の群遅延の値を用いて、式15からQ値は1.6454と計算されます。このQ値を式17に代入すると、位相マージンは約33.67˚となります。
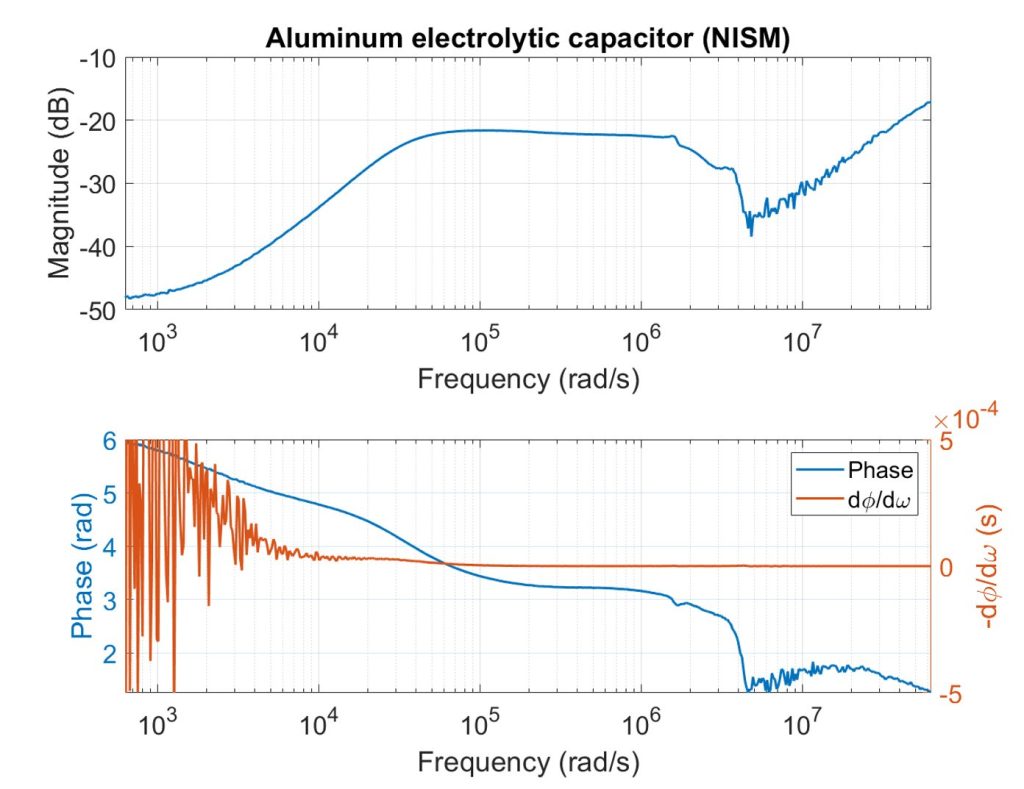
アルミ電解コンデンサの場合、図10に示す振幅と群遅延のプロットには顕著な共振ピークは見られません。この共振ピークが現れた場合、システムは十分に減衰されており(位相余裕が約70°以上)、したがって安定していることを示します。この仮定は、位相余裕と減衰比の関係(式16参照)が、ある位相余裕値までは線形関係にあることから成り立ちます。この線形関係は次のように近似できます。
\(\zeta \approx \frac{\phi_m}{100} \) (18)
この領域が非線形になる位相余裕は臨界減衰境界であり、共振ピークが消失する点です。周波数領域における2次伝達関数(式12)の振幅の極大値を求めると、式14が得られます。これを0とすると、減衰比は0.707になります。この値は位相余裕として約70˚に相当します。したがって、共振ピークがない場合、位相余裕は約70˚を超えており、ループは十分に減衰され、非常に安定していると考えられます。
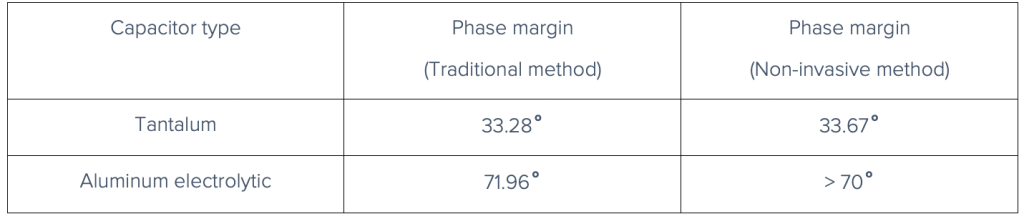
表1は、各安定性測定法で測定された位相余裕値の比較を示しています。各方法の値は概ね良好に一致しています。タンタルコンデンサを用いたNISMで得られた位相余裕は、従来の安定性測定による位相余裕よりもわずか0.39˚高いだけでした。NISMではアルミ電解コンデンサに明確な共振ピークが見られなかったため、従来の方法による位相余裕と比較するための正確な値は得られません。しかし、共振ピークが見られないことから推定される範囲(> 70˚)は、従来の方法で測定された位相余裕71.96˚と一致しています。
製品概要
NISMは、回路を物理的に遮断することなくループの安定性を評価する効果的な方法です。このアプリケーションノートでは、Moku:Proの周波数応答アナライザを使用して、従来の安定性測定で得られた位相マージンの結果とNISMから得られた結果を比較し、ほぼ同一の値を示しました。NISMは回路を遮断することなく、回路の出力インピーダンスを用いて群遅延のピークに基づいて共振時のQ値を求め、この関係を用いて位相マージンを信頼性の高い方法で推定します。
さらに、レギュレータ基板上で異なるESRを持つコンデンサの効果を評価しました。その結果、ESR値が高いほどインピーダンス勾配が緩やかになり、ゲイン周波数のクロスオーバーがシフトするため、位相マージンが増加することがわかりました。
全体として、NISMは制御ループの安定性を解析するための信頼性、効率性、そして非破壊的な手法であることが証明されています。煩雑な測定を回避できる利便性により、パワーエレクトロニクスにおける設計検証とトラブルシューティングの両方において貴重なツールとなっています。しかし、考慮すべき制限事項もいくつかあります。NISMは、限られた位相余裕範囲内でループ安定性の信頼性の高い推定値を提供します。従来の手法では制御ループを分割する必要がありますが、NISMではNISMでは実現できないより包括的な安定性評価が可能になります。したがって、より大きな位相余裕の解析が必要なシステムでは、従来の手法の方が適しています。NISMは、位相余裕が小さいシステムや、ループを分割することが非現実的または望ましくない環境で特に有利です。
参考情報
[1] GF Franklin、JD Powell、A. Emami-Naeini、「フィードバック制御と動的システム」、第8版、グローバル版、ピアソン、2019年。