



このシリーズでは、周波数領域で発生するフィードバック制御について簡単に紹介することで、ループの設計とデバッグに関する実用的なリファレンスを提供します。
6.1 イントロダクション
PIDコントローラー 多くのデバイスに搭載されており、 モク家Mokuはスタンドアロンの PIDコントローラー、および統合PIDコントローラの一部として レーザーロックボックス の三脚と ロックインアンプこのシリーズの最終回では、Moku PID フレームワークの同等の周波数領域モデル 2 つを紹介し、ユーザーが外部ソフトウェアで制御ループをモデル化できるようにします。
第1部 伝達関数の定義を確立し、複雑なシステムをモデル化するための制御ループブロック図を構築するためのコンポーネントを提供します。 第2部 フィードバック制御システムを使用して外乱を抑制したり、プロセス設定値を追跡したりする方法を説明します。ノイズの多いセンサーに関連する複雑さについても説明します。オープンループシステムとは異なり、フィードバック制御下のデバイスは不安定になる可能性があり、パフォーマンスと堅牢性の間に緊張関係があります。最終的には、信号伝播の遅延が最も厳しい制限を課す可能性があります。これらの問題は、 第3部周波数領域では、フィードバックシステムのほとんどのパラメータは、そのオープンループ伝達関数にリンクできます。 第4部 この重要な量を測定する方法を説明し、それを形作る際によく使用される関数のリストを示します。 第5部 アクチュエータの飽和を回避する 6 つの方法について説明し、複数のアクチュエータの処理に役立つアイデアを紹介します。このシリーズの第 XNUMX 部では、PID コントローラについて学習して終了します。この一般的な制御アーキテクチャは、通常、時間領域の観点から検討されますが、ここでは補完的な周波数領域表現について説明します。
6.2 伝達関数
PIDコントローラの出力は、比例、積分、二重積分、微分という独立したパスの加重和として記述できます。これにより、次の形式の伝達関数H(s)が得られます。
\(P + frac{K_I}{s} + frac{K_{I+}}{s^2} + K_Ds\)
または飽和項を含む、
\(H(s) = P + frac{K_I}{s} frac{s}{(s-p_{IS})} + frac{K_{I+}}{s^2} frac{s^2}{(s-p_{IS})^2} + K_Ds frac{-p_{DS}}{(s-p_{DS})}\)
\(= P + frac{K_I}{(s-p_{IS})} + frac{K_{I+}}{(s-p_{IS})^2} + K_Dsfrac{-p_{DS}}{(s-p_{DS})}\) (6.1)
周波数応答は、この式から次の代入によって得られる。 s = iωここで、 i は虚数単位であり、 ω 角周波数。利用可能な機能のサブセットは、不要な項を削除することでモデル化できます。
表 6.1 は、モデル パラメータが機器に提供される値とどのように関連しているかを示しています。
表 6.1: モデル パラメータ。Moku 機器ソフトウェアで設定されたパラメータは表の最初の部分にリストされ、派生パラメータはその後に表示されます。
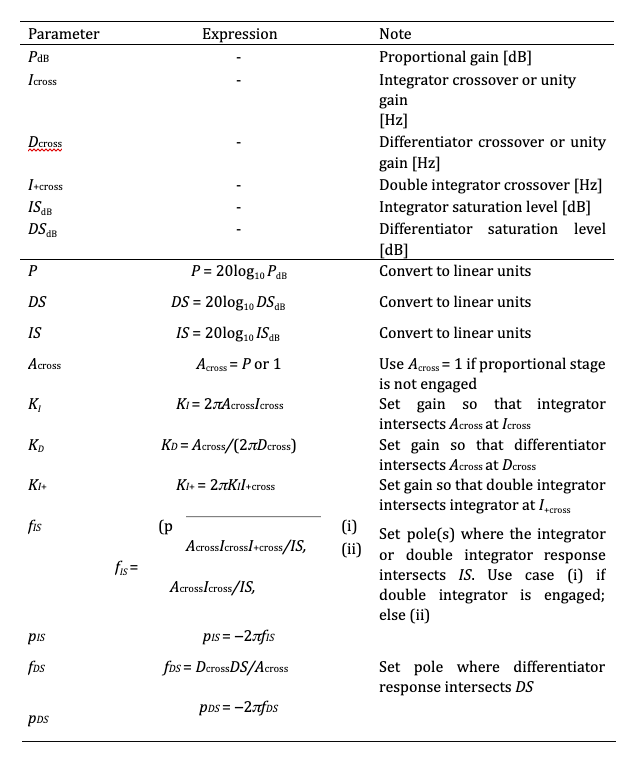
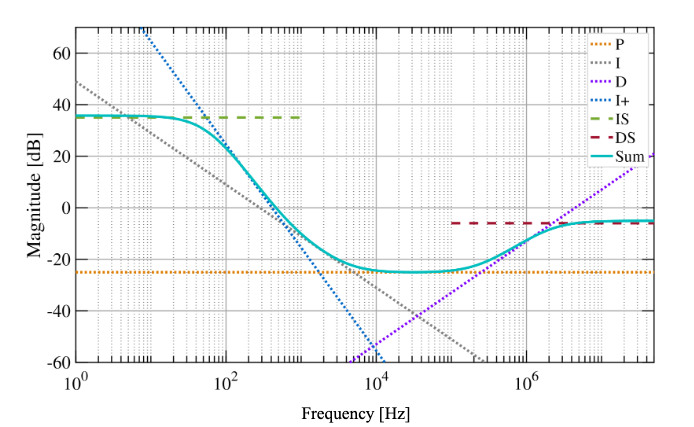
図 6.1: 有効なすべてのステージ (点線) の合計は、全体的なコントローラー応答 (実線) を示します。積分器と微分器の飽和レベルは破線で示されます。ユーザー定義のパラメーターは、さまざまな寄与の相対的な大きさを定義します。
図 6.1 は、寄与パスの合計によって総応答がどのように与えられるかを示しています。
6.3 ゼロ、極、ゲイン
別のアプローチとしては、応答を零点、極、全体のゲインで記述する方法があります。つまり、
\(H(s) = K frac{(s-z_1)(s-z_2)ldots(s-z_N)}{(s-p_1)(s-p_2)ldots(s-p_N)}.\) (6.2)
このような記述は式(6.1)の展開と簡略化によって実現できる。一般的な場合には、
\(H(s) = (P-K_Dp_{DS})frac{(s-z_1)(s-z_2)(s-z_3)}{(s-p_{IS})^2(s-p_{DS})},\) (6.3)
ここで、ゼロは方程式の根によって与えられる。
\((P-K_Dp_{DS})s^3+\)
\((2K_Dp_{IS}p_{DS} + K_I – Pp_{DS} – 2Pp_{IS})s^2+ % s^2\)
\((-K_Dp_{IS}^2p_{DS} – K_Ip_{DS} – K_Ip_{IS} + K_{IP} + 2Pp_{DS}p_{IS} + Pp_{IS}^2)s+\)
\((K_Ip_{DS}p_{IS} – K_{IP}p_{DS} – Pp_{DS}p_{IS}^2)=0.\) (6.4)
解析的な方法は少々扱いにくいので、この方程式を数値的に解きます。
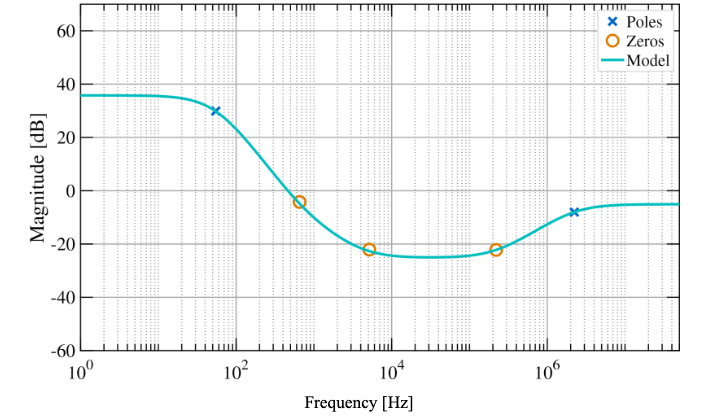
図6.2: 極と零点の周波数がマークされた制御器の応答。50 Hz付近の極の多重度は2であることに注意してください。
図 6.2 は、図 6.1 に示した応答を、合計パスではなく極とゼロの観点からどのように特徴付けることができるかを示しています。
6.4 測定データとの比較
図6.3は、我々のモデルと、 レーザーロックボックス の Moku:Pro対象周波数範囲全体にわたって許容可能な一致が観察されます。
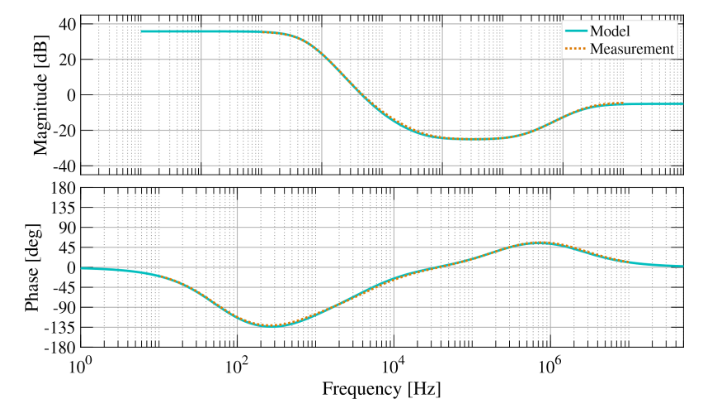
図6.3: モデルと測定データの比較。最悪の場合でも1dB/3◦以内の一致が見られ(図参照)、通常はXNUMX桁以上良好な一致が見られます。
6.5 より正確なモデル
数値上の理由から、 PIDコントローラー は、上で説明したように((6.1)を参照)、項の純粋な和として実装されるのではなく、(P + I + D) × (P + I)ここで、 P、私 の三脚と D 比例項、積分項、微分項に対応する。二重積分器を生成することに加えて 私 × 私 項では、モデルに追加する必要がある他の2つの交差項も実現します。
\(H^{素数}(s) = frac{1}{P}timesleft(P + frac{K_I}{(s-p_{IS})} + K_Dsfrac{-p_{DS}}{(s-p_{DS})}right)timesleft(P + frac{P}{K_I}frac{K_{I+}}{(s-p_{IS})}right)\)
\(=H(s) + Pfrac{K_{I+}/K_I}{(s-p_{IS})}+K_Dsfrac{-p_{ds}}{(s-p_{DS})}frac{K_{I+}/K_I}{(s-p_{IS})}.\)
極零点ゲインモデルでは零点のみを修正する必要がある。(6.4)の左辺に次の項を加える。
\((PK_{I+}/K_I – K_Dp_{DS}K_{I+}/K_I)s^2+\ % s^2\)
\((K_Dp_{DS}p_IK_{I+}/K_I – Pp_{DS}K_{I+}/K_I – Pp_IK_{I+}/K_I)s+\)
\(( Pp_{DS}p_{I}K_{I+}/K_I).\)
追加条件は、 I+ 二重積分ステージが作動しており、典型的なモデルに必要な精度レベルでは一般に重要ではありません。
6.6 要約と結論
このシリーズの第1回目では、周波数領域モデルを紹介しました。 PIDコントローラー 見つかった モク 楽器。通常は時間領域の動作で説明されますが、この例では2つの領域の相補性がよく強調されています。このモデルは浮動小数点ソフトウェアで実装される予定です(マトラブ, Python など)を使用して、ユーザーの実験の設計と分析を支援します。モデルは測定データとよく一致します。ただし、最高の精度が必要な場合は、システム応答を直接特性評価することをお勧めします。 周波数応答アナライザ.
このシリーズ全体で、周波数領域制御の基礎を説明しました。伝達関数の定義から始めて、ブロック図を使用してフィードバック制御ループを構築し、定常状態で信号がループ内を伝搬する様子を示しました。この作業により、外乱除去、設定点追跡、安定性というアイデアが生まれました。最後に、開ループ伝達関数を形成する際にこれらの概念がどのような相互作用をするかを簡単に説明しました。この作業全体を通じて、特に安定性に関する事項では、数学的な詳細を最小限に抑えるよう努めました。より詳細で厳密な内容を求める読者には、以下に引用した文献が役立ちます。
参考情報
A. アブラモビッチとJ. チャプスキー、 フィードバック制御システムオランダ、ドルドレヒト:Springer、2000年XNUMX月。
緒方 憲一 現代制御工学、第5版。アッパーサドルリバー、ニュージャージー州:ピアソン、2009年XNUMX月。

