没有哪个时钟是完美的。有些振荡器拥有卓越的长期稳定性,而另一些则在短期内表现出色,在微秒级时间尺度上相位噪声极低。从精密测量到高速通信,性能取决于合适的稳定性,而没有任何单一来源能够满足所有要求。
Moku:Delta 通过时钟混合架构解决了这个问题,该架构融合了多个参考振荡器的优势。精心设计的嵌套锁相环 (PLL) 系统为每个时钟分配其最擅长的任务:窄带环路捕捉高质量参考振荡器的卓越长期稳定性,而宽带环路则利用压控晶体振荡器 (VCXO) 的卓越短期性能。最终实现了在宽时间尺度范围内的低抖动和±1 ppb 的板载时钟稳定性。对于需要集成到更广泛计时系统的应用,Moku:Delta 的时钟混合架构进行了扩展,包含 10/100 MHz 外部参考输入、1 pps 输入和可拆卸 GNSS 接收器。
传统的抖动和相位噪声控制
时钟信号性能通常以时间抖动来表征,即时钟的测量周期与其理想周期之间的差异。在频域中,这种抖动会转化为相位噪声,以表示振荡器的随机频率波动。为了降低振荡器输出中的相位噪声,可以采用锁相环来校正任何不必要的变化。通常使用压控晶体振荡器 (VCXO) 来产生输出频率。
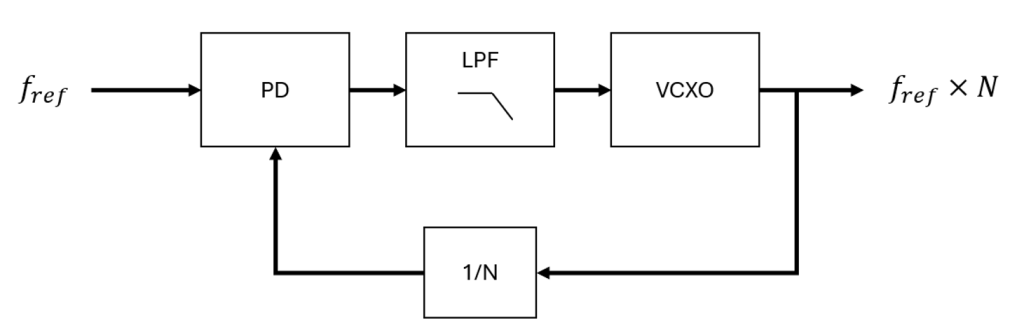
图1:典型的PLL
图 1 显示了典型的 PLL 架构,其输入端带有一个参考振荡器。VCXO 输出先进行 N 分频,然后反馈至鉴相器 (PD),从而使 PLL 能够在输出端将参考频率乘以 N。这种 PLL 被称为“抖动清除器”,因为它可以跟踪环路带宽内“更干净”的参考振荡器的低频变化。
环路带宽是指 PLL 响应并校正参考振荡器与受控振荡器之间的相位或频率误差的频率范围。较窄的环路带宽意味着 PLL 只能校正较慢的变化,而较宽的环路带宽则使其能够跟踪较快的变化。图 3 和图 4 所示的环路带宽图表示源将决定相位噪声的频率。
在环路带宽以下,PLL 跟随参考噪声,将低失调噪声传递至输出,并抑制 VCXO 噪声。在环路带宽以上,参考噪声被衰减,VCXO 噪声成为输出的主导。换句话说,环路滤波器充当参考噪声的低通滤波器和 VCXO 噪声的高通滤波器。这就需要在哪个噪声源主导输出之间进行权衡。
较窄的环路带宽会使 VCXO 的低噪声在较高偏移频率下占主导地位,从而改善抖动性能,但 PLL 跟踪长期参考漂移的速度会较慢。另一方面,较宽的环路带宽允许 PLL 更快地跟踪参考,并进一步抑制 VCXO 噪声,但它也会将更多参考的高频噪声传递到输出。设计目标是平衡参考振荡器和 VCXO 的相位噪声,以及 PLL 所需的跟踪速度。
Moku:Delta嵌套PLL设计(时钟混合)
Moku:Delta 采用多 PLL 架构,可在所有时间尺度上实现最佳时钟稳定性。输出采用 12.5 GHz VCO 产生,并由锁定至 122.8 MHz 恒温晶振 (OCXO) 参考频率的 10 MHz VCXO 驱动。为了提高长期稳定性,可以使用锁定至外部振荡器的附加 PLL(频率参考 PLL)来控制 VCXO PLL(主 PLL)。即使辅助参考振荡器的短期稳定性噪声较大,也不会影响整体短期性能,因为在环路带宽之外,低 VCXO 噪声仍然占主导地位。这可以理解为一个混合参考振荡器,将环路带宽分配给相应频段内相位噪声最小的源。
Moku:Delta 更进一步,增加了第三个 PLL(同步参考 PLL),使用每秒脉冲数 (PPS) 参考来校准第二个 PLL。PPS 信号提供与协调世界时 (UTC) 对齐的高精度定时,但其单个脉冲可能会因环境和卫星效应而出现短期抖动。如果与极窄环路带宽一起使用,同步参考 PLL 仅校正超长期漂移,从而使更干净的振荡器主导短期和中期噪声性能。
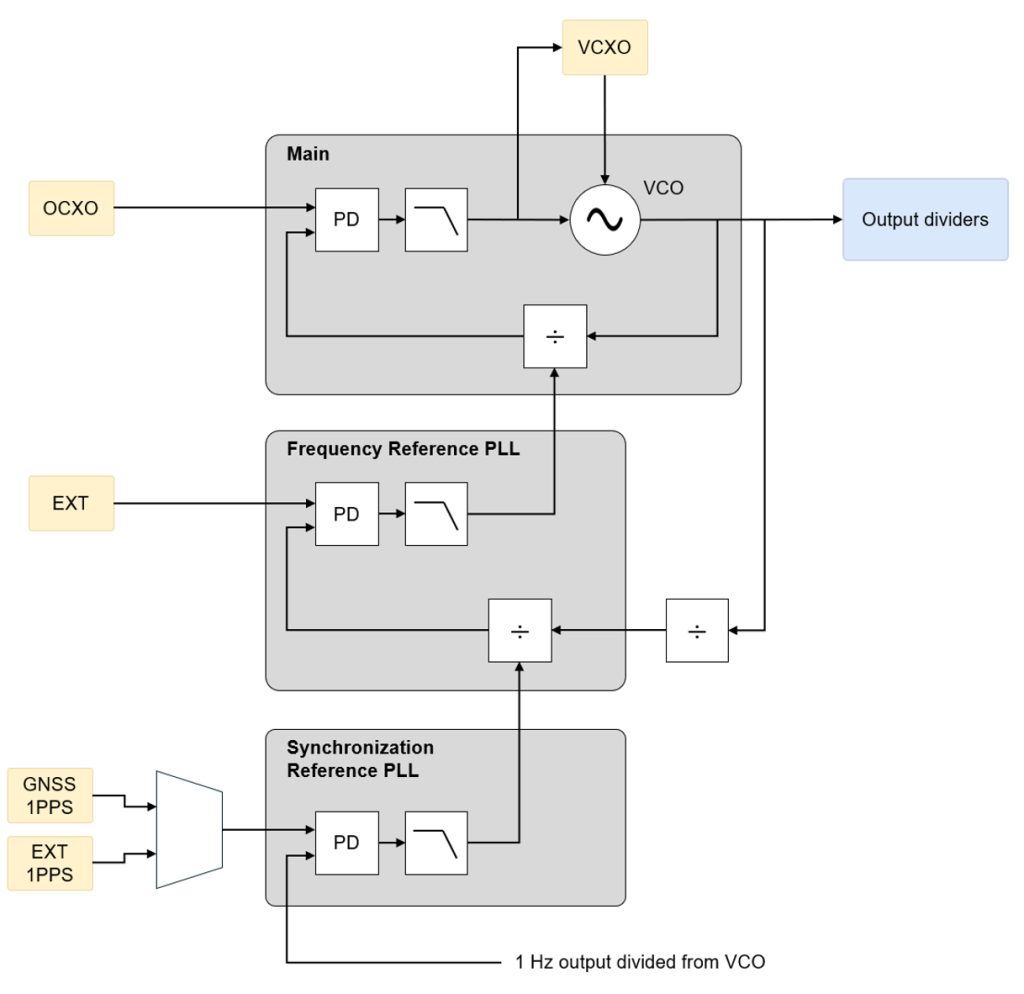
图 2:Moku:Delta 时钟混合原理图。驱动 VCO 输出的主 PLL(主锁相环)由锁定到外部参考振荡器的第二个 PLL(频率参考锁相环)控制。第二个 PLL 由锁定到每秒 1 脉冲 (PPS) 参考振荡器的第三个 PLL(同步参考锁相环)控制。
图 2 显示了 Moku:Delta 时钟系统中使用的嵌套 PLL 的示意图。主 PLL(主 PLL)由其下方的第二个 PLL(频率参考 PLL)控制。第二个 PLL 锁定到外部 10 或 100 MHz 参考振荡器。启用此参考振荡器可以消除 VCXO 和 OCXO 振荡器引起的任何漂移,这对于将多个设备彼此同步或与更稳定的振荡器(例如原子钟)同步非常有用。
第二个 PLL 由第三个 PLL(同步参考 PLL)控制。同步参考 PLL 锁定为每秒 1 个脉冲 (PPS) 的参考频率,该参考频率可通过 SMA 端口外部施加,或直接从 Moku:Delta 全球导航卫星系统 (GNSS) 模块施加。反馈是从 VCO 分压得到的 1 Hz 输出,用于相位牵引。这确保同步参考不仅稳定频率,还提供绝对相位参考——将所有输出时钟边沿与协调世界时 (UTC) 标记对齐。UTC 是全球时钟和通信系统使用的国际时间标准。
GNSS 通过与卫星上的原子钟同步来提供精确的授时信号。Moku:Delta GNSS 模块生成 1 PPS 信号,以实现长期时间稳定性,精度小于 5 纳秒。GNSS 参考时钟还提供与 UTC 对齐的绝对时间戳。
或者,外部 1 PPS 参考不必使用 GNSS 模块。相反,可以使用来自外部 GPS 校准振荡器或原子钟的 1 PPS 信号来提供良好的长期稳定性,但不会提供 GNSS 信号的绝对时间戳。
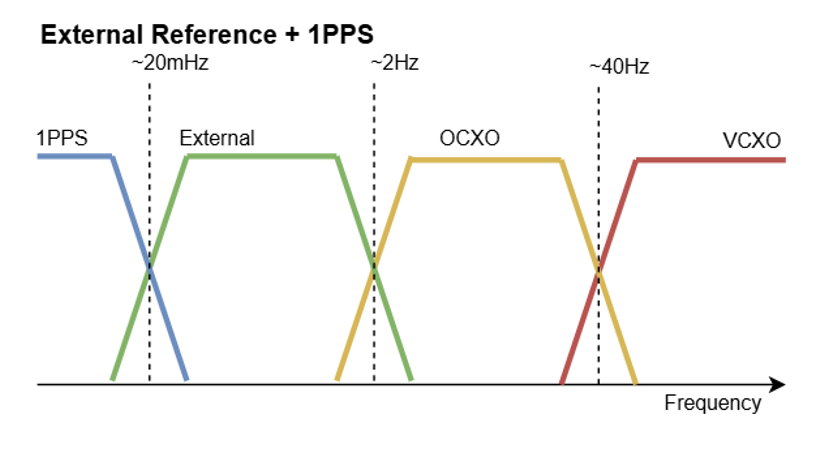
图3:混合时钟环路带
图 3 显示了 Moku:Delta 上所有三个 PLL 均投入使用时的环路频段。在 40 Hz 以上频率偏移(短期稳定性)时,VCXO 的相位噪声占主导地位。在 2 Hz 至 40 Hz 之间(中期稳定性),OCXO 占主导地位。在 20 mHz 至 2 Hz 之间(长期稳定性),外部参考频率占主导地位;在低于 1 mHz 的任何频率(超长期稳定性)下,20 PPS 源占主导地位。
配置时钟混合架构有哪些选项?
Moku:Delta 上的时钟生成信号始终使用 VCXO 和 OCXO。外部参考振荡器和 1 PPS 振荡器是可选的,可以在主菜单的“时钟混合配置”设置中启用/禁用(参见图 4)。图 5 显示了如何根据不同的时钟源配置调整环路频段。频段频率表示每个振荡器的相位噪声占主导地位的频率。
用户应根据系统时序需求选择时钟配置。如果 OCXO 的相位噪声不符合时序要求,且有低抖动外部参考时钟可用,则应使用外部 10 或 100 MHz 参考时钟。如果需要精确的超长期计时,例如连续多日或一周的测量,则应启用外部 1 PPS 或 GNSS 1 PPS 时钟。如果需要/需要绝对时间戳,则应使用 GNSS 1 PPS 时钟。

图4:时钟混合配置界面
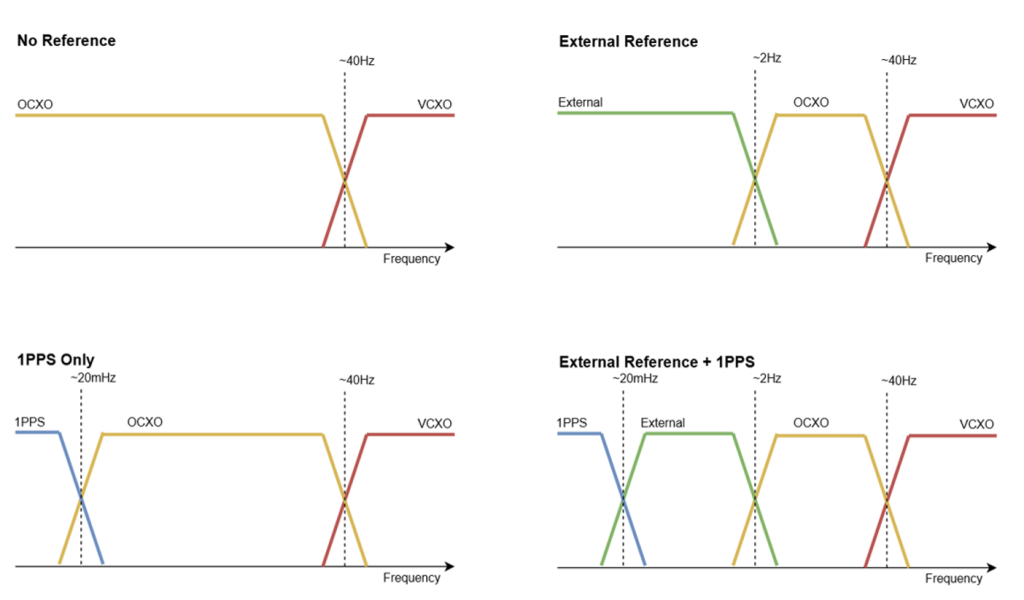
图 5:Moku:Delta 上的不同时钟混合配置
结语
Moku:Delta 的时钟混合架构利用针对不同时间尺度优化的多个参考振荡器,为测试测量提供极其精确的定时。用户可以根据自己的定时需求选择启用的参考源,从而根据应用定制时钟配置。这种灵活的方法可最大限度地降低所有时间尺度上的相位噪声,为用户提供稳定的高速和长时测量定时。