



Moku:Go

Moku:Go 在一台高性能设备中结合了 15 多种实验室仪器。 本应用说明使用 Moku:Go PID 控制器、示波器和可编程电源提供一种视觉上引人入胜的方式来学习 PID 控制器的各种调整方法。

引言
比例-积分-微分 (PID) 控制器是最常见的反馈控制形式之一,广泛用于各种应用,例如汽车的巡航控制或无人机的电机控制。 PID 控制器的目的是驱动过程达到指定的输出,通常称为设定值。 控制器的反馈用于调节和优化该过程的控制。 Moku:Go 具有数字控制的 PID 控制器。 图形用户界面动态可视化增益曲线,让用户能够将增益值直接拖放到频率响应图上,实时计算和显示 PID 控制器的传递函数。 这允许学生在改变 PID 增益值和交叉频率时直接看到系统的极点和零点。
此应用程序的目的是演示如何更新控制理论实验室以更好地满足现代本科实验室的需求。 通常,控制理论是通过严格的数学建模来教授的,很少有使用设备的物理实验室。 该应用程序通过应用更直观的组件引入了现代控制理论教育方法,帮助学生更轻松地将课堂上学到的理论与现实生活中的控制系统联系起来。 这是通过使用直流电机风扇、红外距离传感器和 Moku:Go 可用的几种集成仪器来控制乒乓球的高度来完成的。 Moku:Go 提供 15 多种实验室仪器,其中三种用于本实验:示波器、PID 控制器和可编程电源。 这些仪器大多数是同时使用的,可以驱动电机控制电路,接收传感器数据,并输出指定信号以同时控制直流电机的速度。 这样,可以通过通用图形用户界面控制和测量乒乓球的上升时间、过冲和稳态高度等特性,使学生能够快速掌握多个高级概念。 它还允许通过 Moku: 应用程序进行实时调整,以便学生可以看到不同的 PID 增益如何在数学和物理上影响系统。
操作理论
本实验中将使用一台 Moku:Go 为 PCB 供电、读取传感器数据、实现 PID 控制器并生成控制信号。 Moku:Go M2 型号具有四通道可编程电源装置 (PPSU),在此类项目中非常有用,并且使其成为许多实验室的一体式解决方案。 本实验中使用两个 PPSU 通道为 PCB 和作为要控制的主要系统的直流风扇供电。 Moku:Go 还有两个用于读取数据的输入通道和两个用于生成波形的输出通道。 在此实验中,两个输入通道和一个输出通道都用于读取数据并生成控制信号。 请参见下图了解 PID 演示套件和 Moku:Go 如何在闭环系统中协同运行。
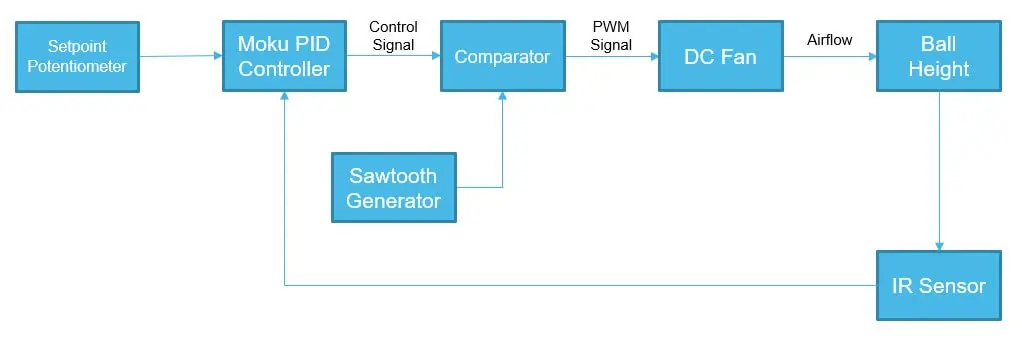
图 1:PID 演示套件框图
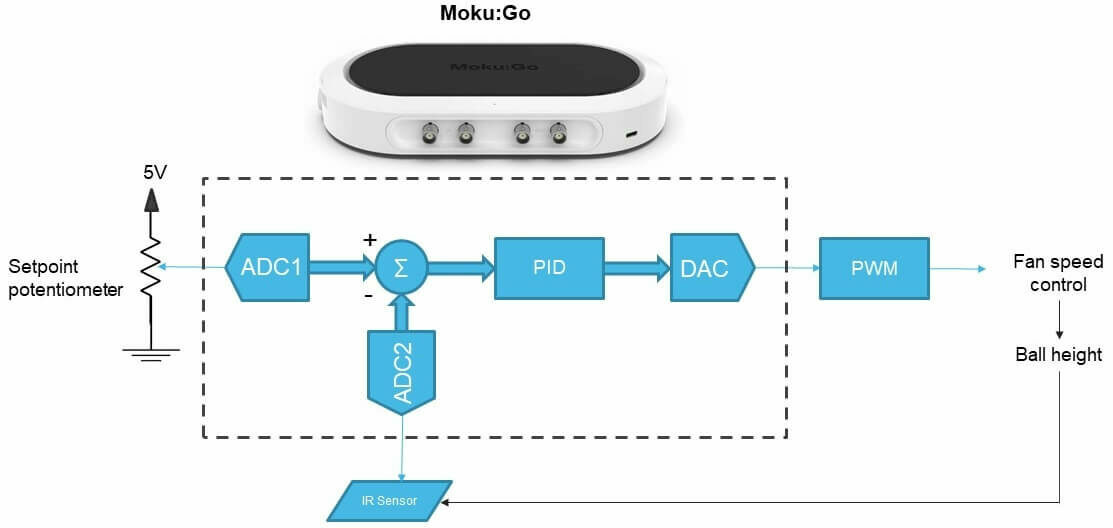
图 2:带有演示套件框图的 Moku:Go PID 控制器
ADC1 将读取由电位计控制的设定点信号。 ADC2 将读取贴在管子顶部的红外传感器。 这两个信号被发送到 Moku:Go 上运行的 PID 控制器,而控制信号由 DAC 生成并发送到 PWM 驱动电路。 该控制信号将决定 PWM 的占空比,这将直接改变直流风扇,随后改变球在管内的高度。
PWM 驱动器使用 NE555 定时器 (U1) 产生锯齿波,并将其馈入比较器 (U2) 的反相输入端。来自 Moku:Go 的 PID 控制器输出 (Out1 或 DAC1) 被馈入比较器的同相输入端,从而产生 PWM 信号。该信号被发送到控制 2 V 风扇功耗的 MOSFET (Q5)。风扇的功耗直接转化为乒乓球的悬浮高度。
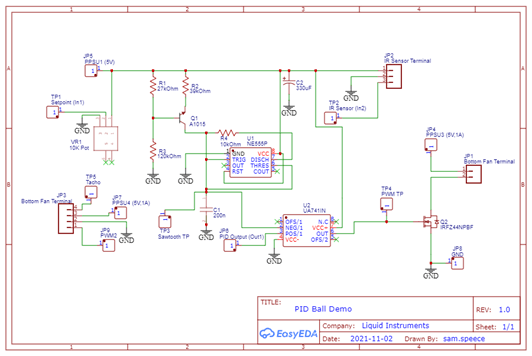
图 3:PID 控制器演示原理图
该实验室装置的另一部分是用于悬浮球的机械系统。它由一个 5 V 直流风扇、3D 打印部件(管子、风扇连接器和传感器连接器)、一个红外传感器和一个乒乓球组成。管子侧面有一个 ¼ 英寸宽的狭缝,可作为系统的可变阻力。管子上每隔 20 毫米有一个较小的垂直狭缝,并进行标记。这些标记应从球的顶部进行测量,因为这是红外传感器首先看到的。这对于稍后调整 PID 控制器非常重要。
实验装置
组件清单
- Moku:Go
- PID 控制器演示 PCB
- PID 控制器演示 3D 打印部件

图 4:PID 控制器演示套件
调整 PID 控制器
Moku:Go PID 控制器设置
该演示的 PCB 设置如下图 5 所示。 所需的电缆包括两个示波器探头、一根 BNC 到鳄鱼皮电缆(或 BNC 到迷你电缆)和三根香蕉到鳄鱼皮电缆。 所有这些电缆(不包括 BNC 到鳄鱼夹)均包含在 Moku:Go 中。
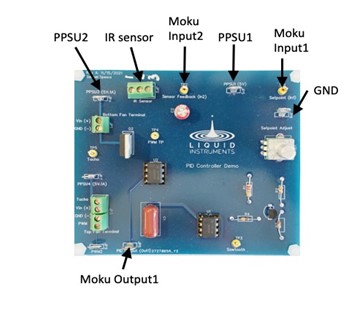
图 5:PCB 电缆设置
由于采用框图式界面,PID 控制器的软件设置非常简单,该界面允许学生将控制系统理论无缝地应用于实际操作。连接到 Moku:Go 后,打开 PID 控制器仪器。将控制矩阵的第一行设置为 [1 -0.2]。控制矩阵允许从物理系统获得反馈,方法是将输入 2 的数据缩放并从输入 1(设定点)中减去。这与图 1 中使用的求和块非常相似。选择 -0.2 作为标量的原因是红外传感器的动态范围必须与锯齿波发生器的动态范围匹配。接下来,将输入偏移设置为 -1 V,输出偏移设置为 2 V。输入偏移的原因是由于球的起始位置(距离红外传感器约 1 毫米)导致该系统的红外传感器偏移量约为 200 V。输出偏移设置为 2 V,因为锯齿波发生器的偏移为 2 V。请注意,您可能需要根据红外传感器的平均偏移更改输入偏移;但是,1 V 是一个合理的起点。
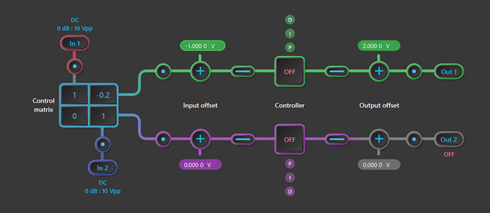
图 6:闭环控制器设置
PID 控制器演示硬件和 Moku:Go PID 软件现已设置为进行闭环调整。
开环响应
在开始闭环调节方法之前,最好先测试一下系统,了解其运行方式和控制方法。系统的开环响应是一种非常常见且简单的测量方法,只需向被测系统发送一个阶跃输入并测量其响应即可。这可以通过将 PID 控制器的控制矩阵设置为 [1 0]、输入和输出偏移量设置为 0 V 以及比例增益设置为 0 dB 来实现。此设置允许输出跟踪输入,即输入 1 从设定点电位器读取的电压。
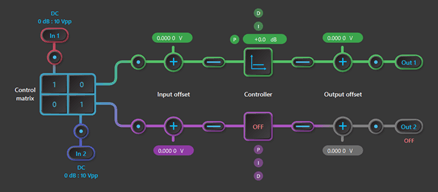
图 7:开环控制器设置
改变设定点电位器,您会注意到球的高度发生变化。 要查看设定点电位器信号,请在输入 1 后启用探测点(单击红色探测点图标)并启用跟踪光标,以便在电位器变化时更容易地查看设定点电压。
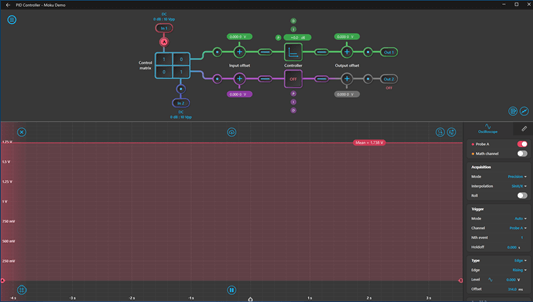
图 8:设定点电位器信号
要进行开环阶跃响应测量,请在输入 2(红外传感器)处启用探针点,将触发模式设置为“正常”,并将触发通道设置为探针 B。使用设定点电位计为球选择合适的高度,然后单击 Out 1 禁用输出。根据所选球的高度选择合适的触发级别,一旦再次启用控制器输出,球将上升到其之前的位置,并类似于下面图 9 中的图形。
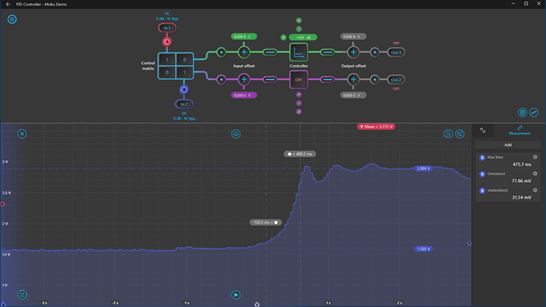
图 9:开环阶跃响应
嵌入式示波器还具有光标和自动测量功能,可以快速表征开环响应信号。
闭环 PID 控制器整定
有几种众所周知的 PID 控制器手动调整方法,其中一种称为 Ziegler-Nichols 方法,它使用系统的开环响应来确定 PID 增益,并在另一篇应用笔记中完成 开始. 此应用程序将使用闭环方法来提供相当稳定的结果。 在开始闭环调整之前,请确保将控制器设置重置为类似于图 6 的设置。
a. 打开 PID 控制器仪表,仅打开比例增益并将其设置为 0 dB。调节设定值电位器,直到球达到所需的调节高度。如果起始高度不同,PID 控制器参数的值将与下方不同。本应用将球的起始高度设为 60 毫米,即 V设定 = 2.1 V(距球顶部 60 毫米,因为这是红外传感器所看到的)。
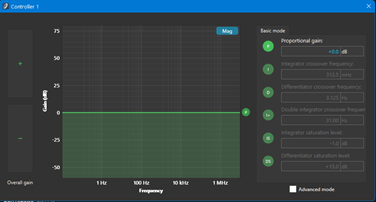
图 10:比例增益设置
b. 增加比例增益,直到球开始摆动。 请记住,您可以使用鼠标拖动增益并直接在图形上进行调整。 还可以选择使用鼠标滚轮滚动数字进行调整,或手动输入值。
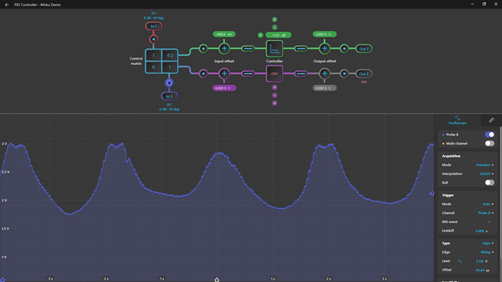
图 11:系统振荡图
c. 使微分器增益达到其最高交叉频率并降低微分器交叉频率,直到振荡停止(或大大降低,因为由于传感器噪声,球通常会在管中有一些小的移动)。
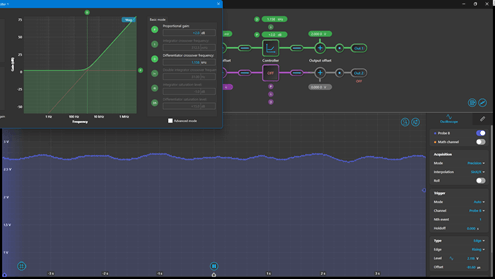
图 12:PD 控制器值和系统响应
d. 在其最低交叉频率启用积分器增益。 这将导致控制器饱和,因此也启用积分器饱和水平。 这将限制积分器交叉频率,因此系统也不会饱和。 启用这两个参数后,球的高度会增加,因此在进一步调整之前,降低比例增益,直到球的高度与步骤 a 中开始调整时的高度相同(在本例中约为 60 毫米)。
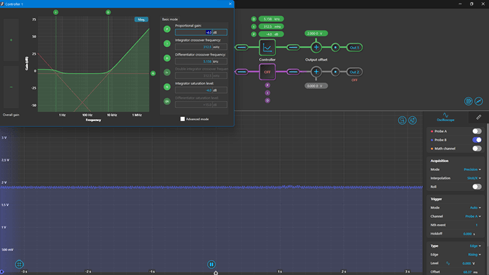
图 13:PID 控制器值和系统响应
如果球开始以类似于步骤 b 的幅度振荡,则调整积分器交叉频率和微分器交叉频率,直到 IR 传感器输出类似于上面的图 13。
e. 既然已经找到了初始 PID 增益,就可以使用下表作为指导,根据对阶跃输入的闭环响应调整每个增益,通过反复试验来进一步调整系统。 在调整最佳增益值时,在最小点和最大点之间改变设定点非常重要。
表 1:PID 增益调整指南

请记住,当增加 KP 时,需要降低设定值以保持相同的球高。 随意直接在传递函数图上拖动 P、I 或 D 增益值,以查看每个增益值如何改变系统的不同方面。 上表中的假设是否与系统响应 PID 控制器中相关增益值变化的方式相匹配?
f. 使用 PID 控制器内的内置示波器,通过在 PID 控制器信号链内放置一个探测点来获取用于表征系统的测量值。 IR 传感器反馈应该在输入 2 上。在 PID 控制器块之前和之后还有一个数字开关,这有助于通过阶跃输入刺激系统,而无需物理开关或不断拔下电缆。
下面是对所需 60 毫米球高度逐步增加的调整良好的响应。
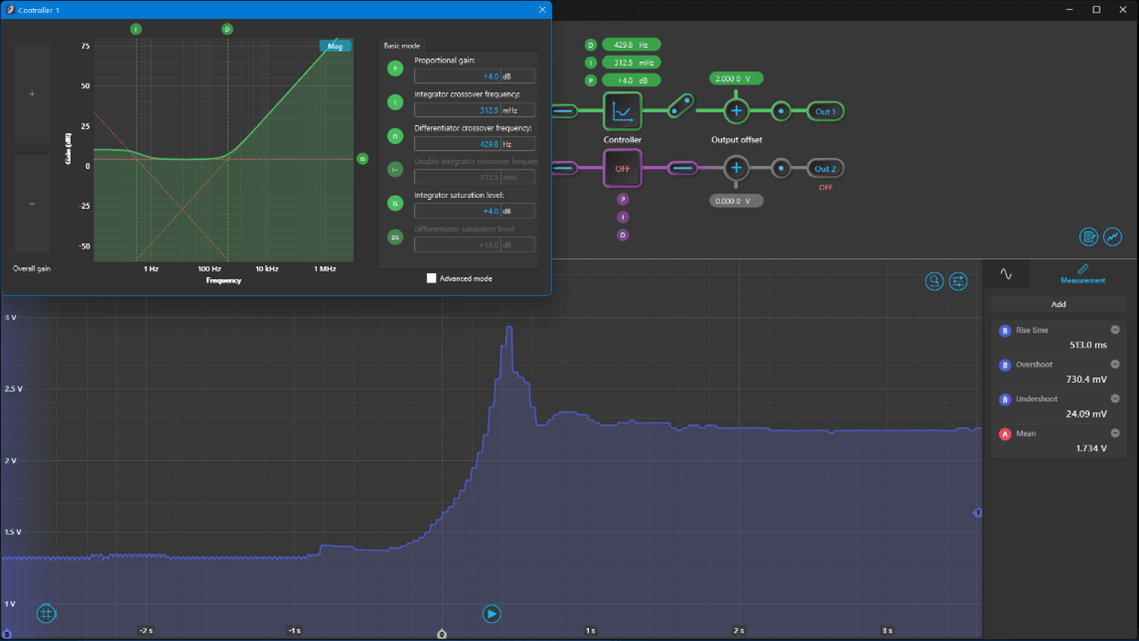
图 14:调整后的 PID 控制器增益和系统响应
此阶跃响应是使用设定点电位器从低电平 40 mm 输入到高电平 160 mm 输入。 有趣的是,尽管球几乎没有超过所需的设定值,但图表的超调量仍然相对较高。 这可以通过 IR 传感器的数据表来解释,其中当物体进入传感器的 40 – 50 毫米范围内时,传感器输出电压存在非线性,这会导致我们的系统出现看似较大的过冲。
结语
本应用笔记展示了如何使用 Moku:Go PID 控制器调整闭环控制系统,以改善常见的系统特性,例如上升时间、过冲和稳态误差。除了 PID 控制器外,本笔记还使用了集成示波器、波形发生器和可编程电源,为电路驱动器和直流风扇供电和控制。通过使用浮动乒乓球以及交互式传递函数图来可视化 PID 控制器的工作原理,有利于希望通过动手、高度可视化的示例来增加控制理论课程深度的学生和教授。 Moku:Go PID 控制器可以帮助学生通过这个实验将理论与现实世界的实现联系起来。
Moku:Go 的好处
对于教育工作者和实验室助理
有效利用实验室空间和时间
易于一致的仪器配置
专注于电子设备而不是仪器设置
最大化实验室助教时间
个人实验室,个人学习
通过屏幕截图简化评估和评分
对于学生
以自己的节奏进行的各个实验室可以增强理解和记忆
便携式,选择实验室工作的节奏、地点和时间,无论是在家、在校园实验室还是远程协作
熟悉的 Windows 或 macOS 笔记本电脑环境,但配备专业级仪器
Moku:Go 演示模式
您可以在 Liquid Instruments 网站下载适用于 macOS 和 Windows 的 Moku:Go 应用程序。 演示模式无需任何硬件即可运行,并提供了使用 Moku:Go 的精彩概述。
致谢
我们要感谢 Vivek Telang 博士花时间帮助设计这个项目,以用于进一步的控制系统教育。 如果您想就有关本应用说明的问题与 Telang 博士取得联系,请联系他: vivek.telang@utexas.edu.

