



测试仪器的评估通常围绕其本底噪声展开,这是高精度仪器的一个关键指标。然而,建立本底噪声和测量信号质量之间的明确联系可能很难。本应用说明旨在阐明噪声谱密度的概念,并探讨可以显著提高测量信噪比的各种因素,利用 Moku:Pro.
了解本底噪声
在考虑购买测试仪器时,本底噪声是一个关键标准,因为它对测量的信噪比 (SNR) 有重大影响,并且直接影响检测弱信号的能力。模拟噪声来自各种来源,包括电磁干扰 (EMI) 和模数转换器 (ADC) 量化,从而导致噪声成分复杂。本应用说明提供了本底噪声的分析,探讨了噪声带宽对噪声功率和测量信号的 SNR 的影响。
SNR 是一个无量纲测量,用于评估信号功率与噪声功率的比率,是评估信号采集和处理系统的关键参数。
信噪比 = \(\frac{P_S}{P_N}\,(1.1)\)
信号功率 PS 使用公式 1.2 计算,其中 T 表示观察间隔的持续时间。对于周期信号, T 等于信号的周期,并且 PS 对应于信号的均方值。
\(P_s = \frac{1}{T} \int_{0}^{T} s^2 \,(t)dt \ = E[s^2(t)],(1.2)\)
对于正弦信号,均方根 (RMS) 幅度为 A/√2,在 Moku:Pro 上 A 表示正弦信号的幅度。正弦信号的功率为 A2/2.
噪声功率 PN 可用同样的方法计算。
\(P_N=\frac{1}{T} \int_{0}^{T} n^2 \, (t) dt = E[n^2 (t)]=[(E[n(t)])]^2+E[(n(t)-E[n(t)])^2 ]=\mu^2+ \sigma^2 , (1.3) \)
当噪声的直流失调 μ 为零时,PN 等于方差,σ2,噪音。
考虑一个实验,使用幅度为 10×√2 mV 的正弦波信号,对应预期功率为 100 μV2。在不同的噪声环境中收集数据会导致不同程度的额外噪声功率,因此 SNR 也不同。在图 1 中,我们描绘了在四种不同噪声条件下观察到的结果。
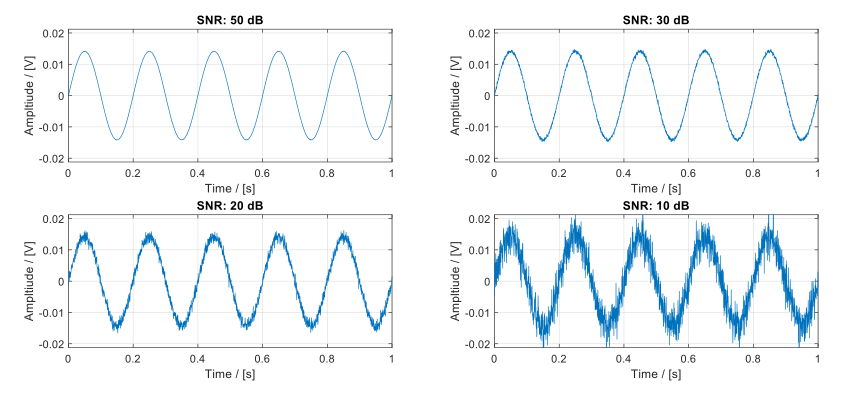
图 1:在多个加性噪声功率场景下捕获的恒功率正弦波的模拟,其 SNR 值范围为 50 dB 至 10 dB。
在图 1 所示的图中,信号保持不变,但加性噪声功率发生变化。随着噪声功率的增加,信号的可见性会降低。最终,当噪声变得很大时,它会完全掩盖信号,如图 2 所示。
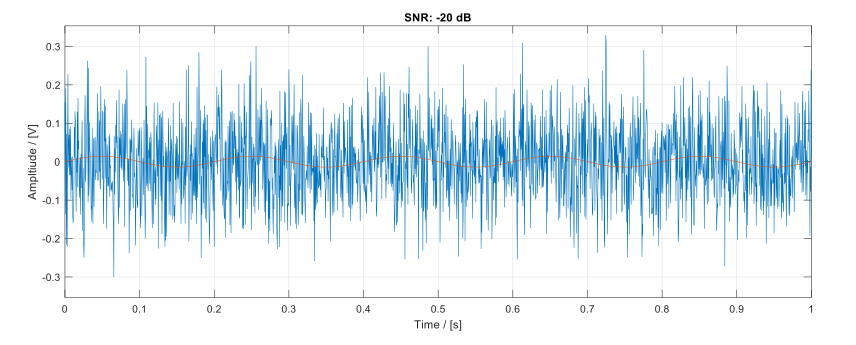
图2:噪声环境导致测得的-20 dB SNR(蓝色)。正弦波(红色)无法与蓝色迹线区分。
这意味着仪器产生的过大噪声可能会掩盖微妙但至关重要的信号。例如,在单光子实验中,信号可能会被模拟输入噪声所掩盖。以下部分将进一步研究此噪声基底并探索提高 SNR 的可能策略。
量化噪声
“噪声水平”一词涵盖了各种噪声源,例如 热噪声 和量化噪声,导致各种噪声行为,包括 1/f 闪烁噪声 以及 白噪声. 分析本底噪声涉及检查时域和频域。
图 3 显示了本底噪声(蓝线)和具有加性本底噪声的信号(红色)的典型图。
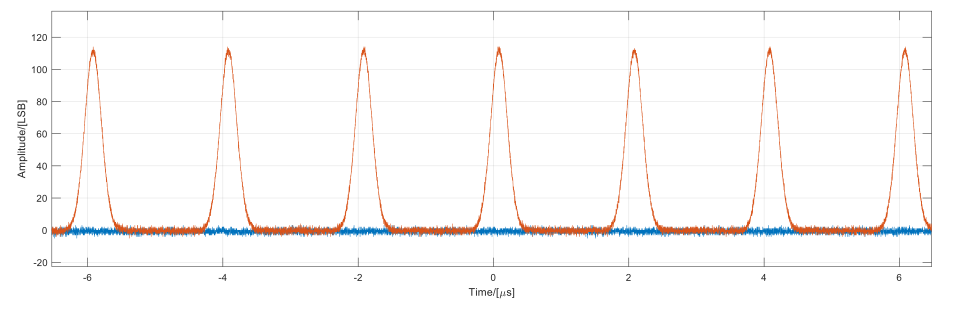
图 3:时域噪声基底(蓝色)和捕获的实际输入信号(红色) Moku:Pro ADC。
关注时域可以深入了解 RMS 噪声功率和噪声幅度的分布。图 4 显示了图 3 中收集的噪声基底的统计特性,表明输入噪声严格遵循高斯分布,平均值为 -0.7095 最低有效位 (LSB),标准差为 1.1472 LSB。
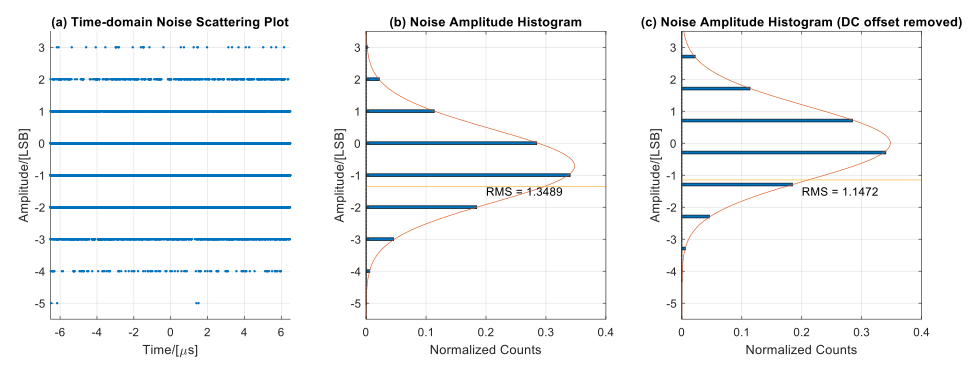
图 4:ADC 噪声的统计分布以 LSB 为单位。条形图 (b) 表示 RMS 噪声为 1.3489 LSB。收集到的噪声数据中的直流偏移 (μ) 为 -0.7095 LSB。去除直流偏移后,RMS 值为 1.1472 LSB,如图 (c) 所示。该关系由公式 1.3489 验证2 -1.14722=(-0.7095)2
在本节中,我们将深入分析量化噪声。通常,人们会担心测试仪器模拟输入的分辨率,因为量化噪声可能会扭曲测量信号并损害信号质量。然而,在高带宽仪器中,量化失真通常不那么明显。这是因为电子元件中电子的热运动产生的白色热噪声可以有效地随机化量化噪声。因此,即使整体量化噪声功率保持不变,量化噪声也会融入加性白噪声基底,而不是表现为与输入相关的谐波失真。
当白色热噪声超过量化噪声且其标准偏差超过 LSB 的 1/3 时,量化噪声可视为均匀分布在整个频谱中的白噪声。否则,当存在输入信号时,量化噪声可能在频域中表现为谐波失真。在大多数高带宽系统中,尽管本底噪声较低,但由于噪声带宽较大,噪声功率超过 LSB 的 1/3。预期量化噪声功率计算遵循公式 2.1,其中 eq2 表示瞬时量化噪声功率,E(eq2) 是量化噪声功率的期望值。假设量化噪声以 LSB 为单位均匀分布在步进分辨率范围 [-1/2 ,1/2 ] 内。概率分布函数 p(eq) 由于均匀分布而等于 1,这意味着所有值都有同等的可能性。
\((E(e_q^2 )=\int_{-1/2}^{1/2}e_q^2 \, p(e_q) de_q = \frac{1}{12}, (2.1) \), 其中 p(eq)是1 LSB以内的误差分布的概率分布函数。
RMS 量化噪声功率为 √(1/12)=0.2887 LSB ,明显低于整体噪声贡献中的 1 LSB。因此,量化噪声不是主要的输入噪声源,与输入白热噪声相比可以忽略不计。因此,量化噪声对测量信号的 SNR 影响很小。
噪声信号通常与时间无关,这意味着系统输入噪声的统计特征(例如平均值、噪声功率和分布形式)随时间保持稳定。此外,在测量特定频率范围内的信号时,分析时域中的噪声可能无法直接帮助理解最终测量的 SNR。因此,更有意义的分析在于探索频域中的噪声,通过噪声功率谱密度 (PSD) 或幅度谱密度 (ASD) 提供有关整个频谱中噪声功率分布的重要信息。
如上所述,噪声功率直接影响 SNR,其中噪声基底不仅涉及总功率,还涉及噪声功率与带宽的关系。考虑噪声基底时,一个关键方面是噪声是一个随机过程,构成分布在整个频率范围内的宽带信号,而不是特定的频率分量。实际上,频谱中可能存在不同的噪声贡献。例如,输入噪声可能来自输入前置放大器的非线性以及 ADC 与后续电路之间的阻抗不匹配。在 Moku:Pro 的背景下,图 30 中可以看到 5 kHz 左右的小凸起。
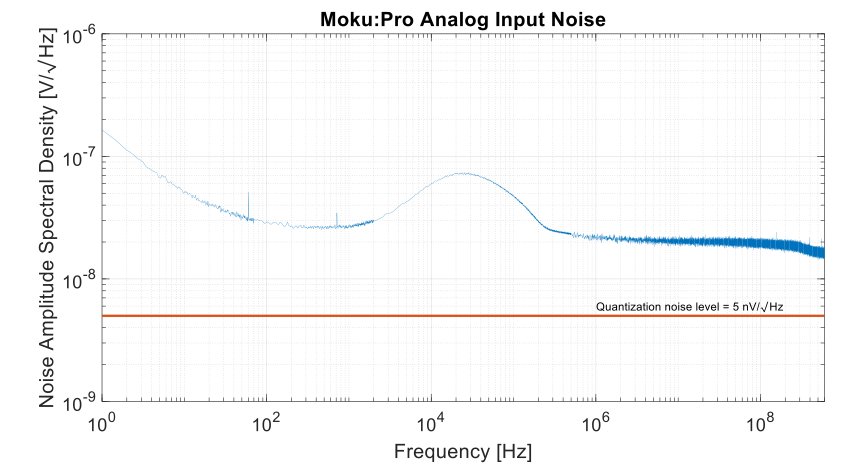
图5:Moku:Pro 模拟输入的噪声 ASD,输入范围为 400 mVpp。约 30 kHz 的轻微增加归因于低速和高速 ADC 的混合。
为了在整个频率范围内实现低输入噪声,Moku:Pro 使用两个模拟输入 - 慢速和快速。快速 ADC 在高频范围内提供低噪声,而慢速 ADC 在低频范围内表现出较低的噪声频谱。与单独使用快速或慢速 ADC 相比,将两个 ADC 的输入组合在一起可在所有频率上实现低噪声频谱。
图 5 直观地展示了频率范围内的噪声功率分布,进一步揭示了测量中的预期噪声功率。它还有助于比较量化噪声和总输入噪声的幅度。量化噪声 ASD 的计算如公式 2.2 所示,其中 ∆ 是最小步进分辨率,在 Moku:Pro 上约为 0.44 mV。鉴于 Moku:Pro 的原生采样率为 625 GSa/s,奈奎斯特频率为 1.25 MHz。
\(ASD_{RMS,量化} = \sqrt{\frac{\Delta^2}{12*625 MHz}} \approx 5 nV/\sqrt{Hz},(2.2)\)
Moku:Pro 上的平均复合噪声水平为 17 nV/√Hz,而不包括量化噪声的噪声水平为 16 nV/√Hz。因此,量化噪声对输入 SNR 的影响有限。
降低噪声功率
提高 SNR 一直是一个有趣的话题,包括两个方面:降低本底噪声和限制噪声带宽。如前几节所述,本底噪声本质上是噪声 ASD,它强调了带宽在实际实验中的重要性。总噪声功率来自单侧噪声 PSD 的积分 顺时针(f) 噪声带宽 BWN,从较低频率边界到较高频率边界 f高 ,低.
\(P_N = \int_{f_{low}}^{f_{high}} S(f)\,df \approx S(\frac{f_{high} + f_{low}}{2})\cdot[f_{high} – f_{low} ] \approx N_0\cdot BW_N,(3.1)\)
在窄带宽中,噪声 PSD 变化极小,尤其是在高频下。因此,\(S(\frac{f_{high}+f_{low}}{2})\) 可以精确近似为一个恒定的单边 PSD,记为 N0。因此,噪声功率PN 可以表示为 \(N_0 \cdot BW_N\)。这表明可以通过降低噪声带宽来最小化测量信号中的噪声功率。鉴于纯正弦信号根据定义缺乏带宽,这意味着只要信号频率在 [f_low,f_high ] 范围内,信号功率 P_signal 就不会受到 BW }}_N 变化的影响。
SNR 可以用公式 3.2 表示,因为 P_signal 与带宽 BW 无关N. 作为 BWN 趋近于零,噪声功率\(N_0 \cdot BW_N\)趋近于零,但 P信号 保持不变。因此,SNR 可以得到显著改善。
\(SNR = \frac{P_{signal}}{N_0\cdot BW_N},(3.2)\)
Moku:Pro 上的测试
本节将使用两种工具, 示波器 以及 锁相放大器,验证噪声功率与噪声带宽直接相关的理论。示波器将展示通过精确模式降低噪声带宽的功效,而锁相放大器将采用嵌入式低通滤波器来限制噪声带宽。演示旨在阐明两种仪器的噪声带宽和噪声功率之间的联系。此外,锁相放大器将说明 SNR 和低通滤波器带宽之间的关系。
示波器
Moku 示波器提供两种数据采集模式:精确和正常。调整时基时,采样率会自动改变以适应内存深度限制。但是,下采样可以以两种方式进行。在精确模式下,来自 ADC 的全速率信号被平均(一种过滤形式)以抽取信号,从而防止潜在的信号混叠并降低信号带宽。相反,正常模式直接对全速率信号进行下采样而不进行平均。这似乎有悖常理,但在测量低频信号时,高带宽示波器的 SNR 性能可能比低带宽示波器更差,假设两台示波器的噪声 PSD 相同。这是因为高带宽示波器可以在测量中包含大量噪声功率,因为 BWN 是相当大的。为了解决带宽增加引起的高噪声功率的影响,一种直接的方法是抽取数字化信号来降低测量带宽。这是精确模式的本质,其中对全速率信号执行平均。
图6中的曲线图对比了普通模式和精密模式下的噪声功率。显然,精密模式下的噪声功率随着噪声带宽的降低而降低,这与预期的10 dB/dec斜率趋势一致。值得注意的是,测量结果中的小峰表示图5所示的ADC混合引起的噪声较大。
然而,正常模式下的噪声功率不受噪声带宽的影响。这种现象的解释是噪声功率从较高频率折回到奈奎斯特带宽(混叠),形成一条几乎平坦的噪声功率曲线,通常称为混叠噪声功率。
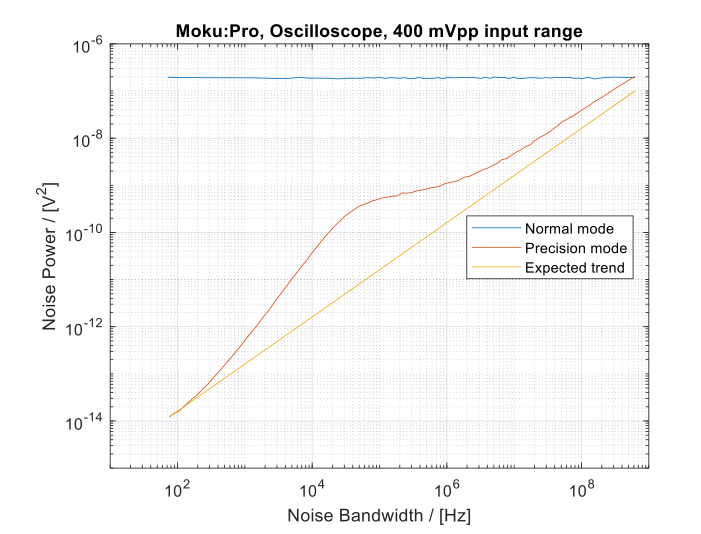
图 6:使用 Moku:Pro 示波器在正常和精确模式下收集各种带宽下噪声数据的噪声功率。在正常模式(蓝色)下,由于混叠噪声功率,噪声功率保持不变,而在精确模式(红色)下,它与预期的噪声功率趋势(橙色)一致。
图 7 中显示的收集数据计算出的 ASD 更明显地体现了噪声功率的混叠。在精确模式下,所有测量的频谱都具有一致的本底噪声,与采样率无关;唯一的区别在于不同采样率对应的噪声带宽。相比之下,在正常模式下,本底噪声随采样率的变化而变化,遵循以下公式定义的特定规则:
\(本底噪声 = 17 nV/\sqrt{Hz} \cdot \sqrt{\frac{1.25 GSa/s}{采样率}}, (3.3) \)
17 nV/√Hz 是 625 MHz 带宽内的平均噪声 ASD
这意味着当信号带宽减小时,混叠噪声功率会提高本底噪声,导致本底噪声上升到混合峰顶,并使混合峰在正常模式 ASD 中不可见。因此,正常模式无法降低噪声功率,因为它无法有效降低噪声带宽。
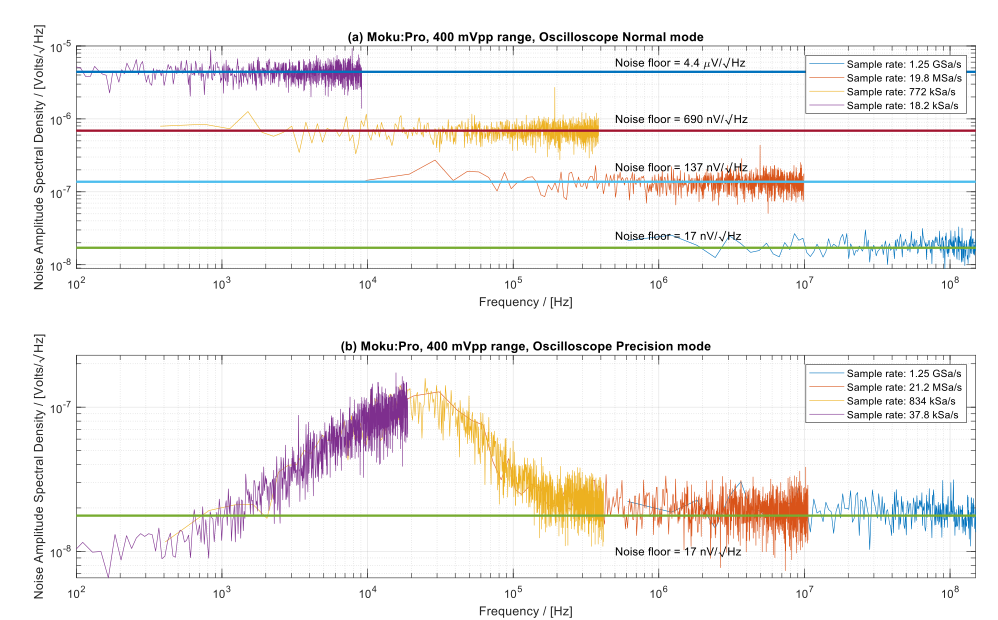
图 7:通过 Moku:Pro 示波器在普通模式和精确模式下观察到不同采样率下的本底噪声变化。在普通模式 (a) 下,本底噪声随采样率降低而增加,总噪声功率保持不变。在精确模式 (b) 下,本底噪声在所有采样率下保持一致。
锁相放大器
示波器采用的降噪技术包括平均和以瞬时采样率保留奈奎斯特带宽内的信号。虽然这是一种获得对输入信号的直观理解的高效方法,但在处理由窄带宽信号调制的高频音调时,它有一个明显的缺点。在这种情况下,示波器必须保持高于信号频率的带宽才能准确测量信号。高带宽意味着测量数据中存在显著的噪声功率。此外,由于 1/f 闪烁噪声,低频范围通常表现出高噪声基底,导致测量信号的 SNR 较低。
在这种情况下,锁定放大器被证明是一种有价值的信号采集工具。锁定放大器的工作原理涉及使用可选低通滤波器带宽进行下变频。选择较小的低通滤波器带宽可有效限制噪声功率,同时保持调制信号的完整性。
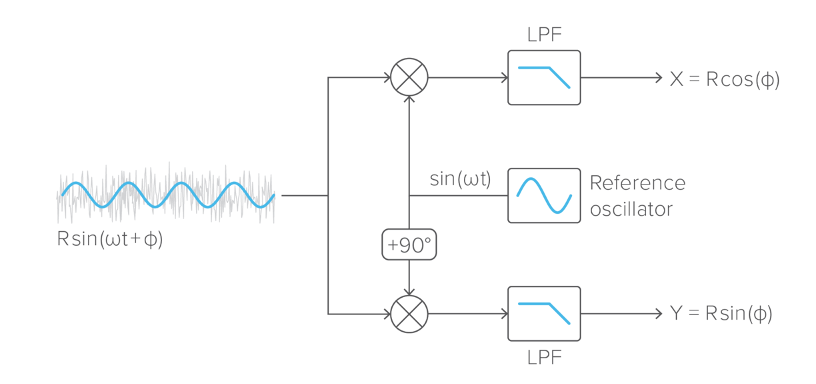
图 8:Moku 锁相放大器具有双相解调器,用于测量同相和正交相位分量。低通滤波器 (LPF) 可衰减 2ω 分量并降低噪声带宽。
在图 9 中,Moku:Pro 的配置为 400 mVpp 输入范围、50 Ω 输入阻抗和 10 MHz 解调频率。通过选择不同的低通滤波器转折频率来等效降低噪声带宽,从而收集噪声数据。可以观察到,测量的噪声功率与预期的噪声功率曲线一致,斜率为 10 dB/dec。此外,使用锁相放大器测量的噪声功率曲线与使用示波器获得的曲线有所不同。锁相放大器集中在高频范围内的窄带上。因此,锁相放大器探测到的本底噪声保持相对平坦。没有遇到“混合”峰,导致测量的噪声功率与预期的噪声功率曲线很好地一致。
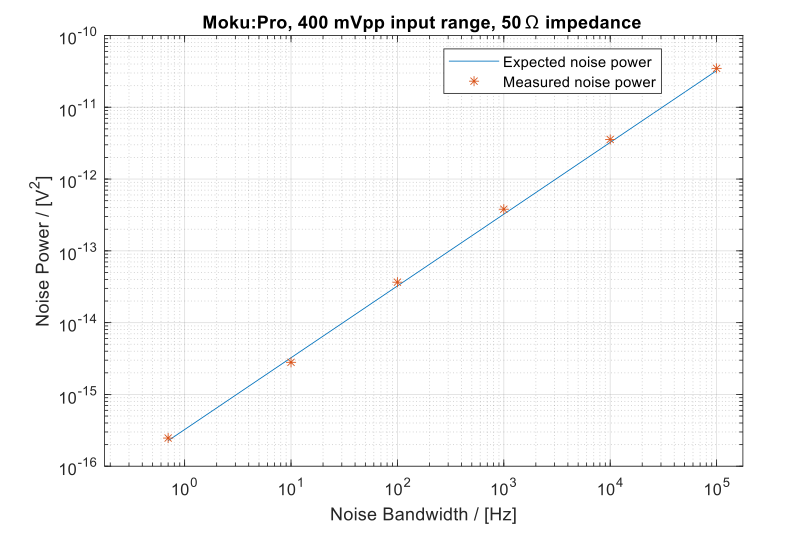
图 9:使用不同低通滤波器转折频率记录数据的噪声功率。测得的噪声功率与预期的噪声功率曲线一致,呈现 10 dB/dec 的下降斜率。
图 10 显示了收集到的数据的 ASD。低通滤波器引入的滚降在该图中清晰可见,强调了收集到的数据中的噪声带宽与低通滤波器的转折频率的对齐。在高频下,进一步衰减噪声的能力受到内部信号链固有分辨率限制的限制。
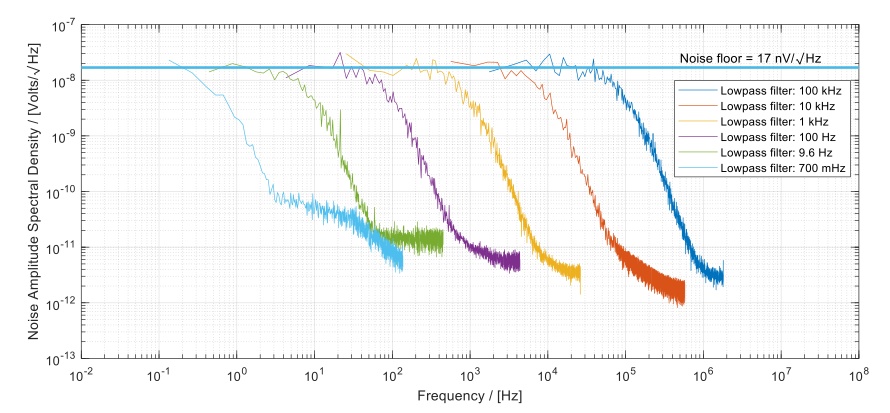
图 10:实施不同低通滤波器转角频率时测量的记录数据 ASD。滚降点对应于配置的低通滤波器转角频率。
输入范围对本底噪声的影响
值得注意的是,不同输入范围的噪底可能有所不同。为了深入探讨这个问题,本节将讨论输入范围的实现。在硬件平台上实现不同输入范围的最直接方法是对模拟输入前端应用衰减。例如,20 dB 的衰减下,在无削波效应的情况下,等效最大可检测信号比无衰减情况下大 10 倍。换句话说,400 mVpp 的 ADC 在配备 4 dB 衰减器时可以有效测量 20 Vpp 信号。然而,ADC 的输入噪声通常保持不变。这意味着随着输入范围的扩大,等效噪声功率也会增加 10 倍。
图11展示了三个范围内的噪声功率。可以看出,噪声功率曲线相邻线之间有20 dB的间隔,这意味着随着输入范围的扩大,噪声功率会增加。
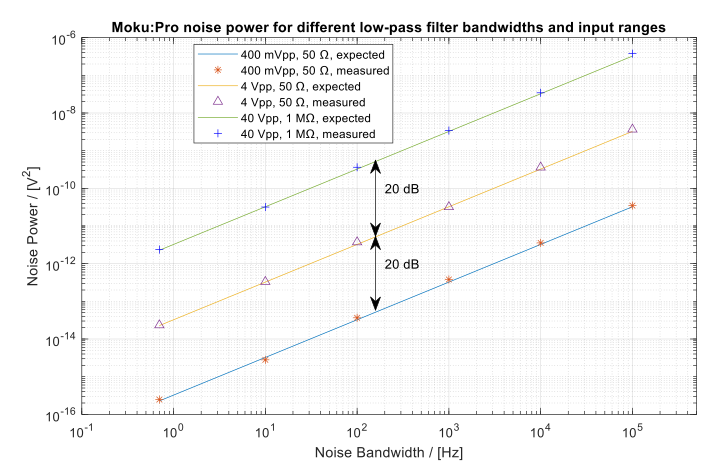
图11:不同低通滤波器转折频率和输入范围下捕获数据的噪声功率。20 dB输入衰减导致等效噪声水平增加20 dB。
图 12 中,噪声 ASD 是根据收集的数据计算得出的。值得注意的是,ASD 的整体形状在不同设置下保持相对一致。主要区别在于整体噪声水平。在最大动态范围内,40 Vpp 范围的本底噪声比 40 mVpp 范围增加了约 400 dB,这归因于输入衰减器从 0 dB 调整到 40 dB。
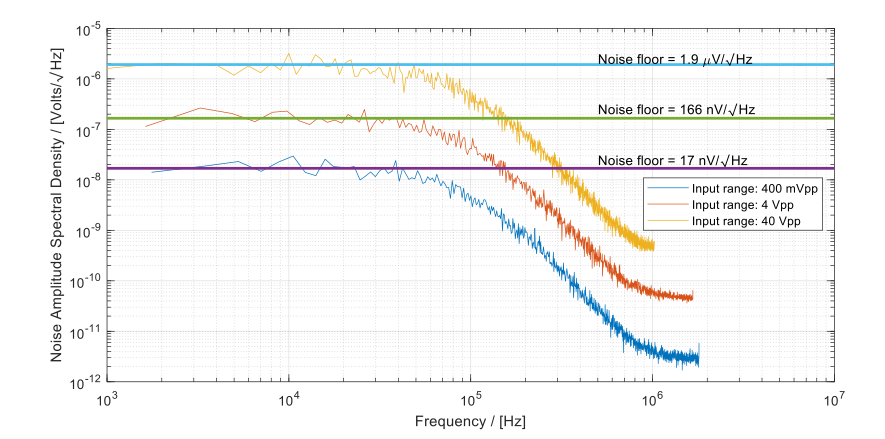
图 12:在不同输入范围内捕获的噪声数据的 ASD,低通滤波器频率设置为 100 kHz。由于 10 dB 的衰减,相邻噪声级之间的 ASD 相差约 20 倍。
计算信噪比
如前文所述,噪声功率与噪声带宽直接相关。当处理的测量信号是直流信号或单音信号时,理论上 SNR 可以提高到无限高的值。本节将介绍实际测量的 SNR 值。
可以使用公式 5.1 确定锁相放大器测量信号的 SNR:
\(SNR = \frac{P_{signal}}{P_{noise}} = \frac{P_{signal}}{\int_{0}^{f_{lowpass}} S(f) \,df} \approx \frac{P_{signal}}{N_0\cdot f_{lowpass}},(5.1)\)
假设 S(f) 是平坦的本底噪声→S(f)= N_0
通常,信号功率P信号,受系统中其他组件的影响,例如光电探测器或激光功率。从该方程可以看出,假设噪声 PSD S(f) 保持不变,则测量信号的 SNR 与低通滤波器转折频率成反比。
为了验证该理论,我们设计了一项测试,收集了不同输入范围和低通滤波器带宽的数据。输入信号由一台10 MHz、100 µVpp的单音信号发生器生成,源阻抗为50 Ω。随后,以10 MHz的信号频率解调该单音信号,以确定输入信号电平。然后,将锁相放大器中低通滤波器的转折频率调整为几个不同的值,并通过将直流值的平方除以解调信号的方差来计算信噪比(SNR)。之所以选择这种方法,是因为直流电平代表信号,而方差代表噪声功率。
结果表明,测得的信噪比 (SNR) 与预期相符。值得注意的是,4 Vpp 和 40 Vpp 设置之间的信噪比差异为 14 dB,而不是 20 dB,这是由于输入阻抗配置为 1 MΩ 造成的。1 MΩ 负载吸收的电压是 50 Ω 源端口的两倍,导致信号功率为 6 Ω 阻抗的四倍(50 dB)。
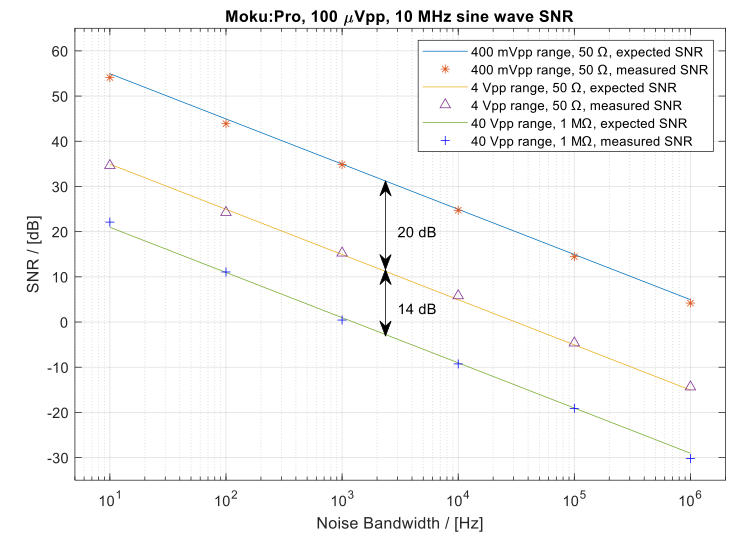
图 13:不同输入范围和噪声带宽下的测量信噪比和预期信噪比。信噪比与扩展的输入范围成比例。14 Vpp 和 4 Vpp 范围之间 40 dB 的信噪比差异归因于 1 MΩ 的输入阻抗。两倍电压的吸收导致电平高出四倍(比 6 Ω 高 50 dB)。
讨论
在本节中,我们将探讨各种考虑因素,包括通过限制信号带宽来增加 SNR 的局限性以及确定适合带宽限制的应用。
当寻求提高测量信号的 SNR 时,应承认某些限制。一个关键限制是信号所需的最小带宽,例如使用锁定放大器分析解调信号中的相位或频率偏移时。在这些情况下,低通滤波器带宽必须超过频率偏差或相位变化率。因此,低通滤波器带宽不能无限减少,这对可实现的 SNR 改进设置了上限。因此,当预期信号是直流信号或随时间缓慢变化时,限制噪声带宽可达到最大效果。
为了实现最佳的 SNR,输入范围应设置为不会削波输入信号的最小水平。如图 12 所示,增加输入衰减可以提高等效噪声基底。因此,在处理小信号时,选择较小的输入范围对于在测量结果中保持较高的 SNR 至关重要。
结语
本应用说明回顾了噪声基底在时域和频域中的重要性,并介绍了在测量信号中实现噪声最小化的方法。噪声基底不仅传达了有关时域统计噪声分布的宝贵信息,而且还提供了对不同频率范围内噪声功率分布的洞察。这成为用户预测 SNR 和了解实际实验中最佳调制频率的宝贵工具。
提高 SNR 的一个有效方法是降低实验中的噪声带宽,这可以通过信号抽取或低通滤波来缩小信号带宽来实现。应用说明还重点介绍了实施噪声带宽降低方法的最佳场景,指出缓慢变化的实验特别适合通过限制噪声带宽来提高 SNR。
此外,在比较设备之间的噪声性能时,考虑它们的动态范围而不仅仅是绝对本底噪声也很重要。通常,较小的输入范围对应于较低的本底噪声。但是,如果信号幅度超出这个小范围,则切换到较大的范围可能会导致噪声性能下降。因此,在评估两个设备的本底噪声时,应始终确保输入范围具有可比性。
有疑问?
在我们的知识库中获取常见问题解答
如果您对设备特性或仪器功能有疑问,请查看我们的 知识库 来查询您正在寻找的答案。 您还可以快速查看热门问题并按产品或主题来优化搜索。
加入我们的用户论坛来与我们保持联系
想要新的功能吗? 有技术支持提示要分享? 从客户案例到新功能公告等等, 用户论坛 是您的一站式门户,作为产品更新以及与 Liquid Instruments 和我们的全球用户社区建立联系。

