



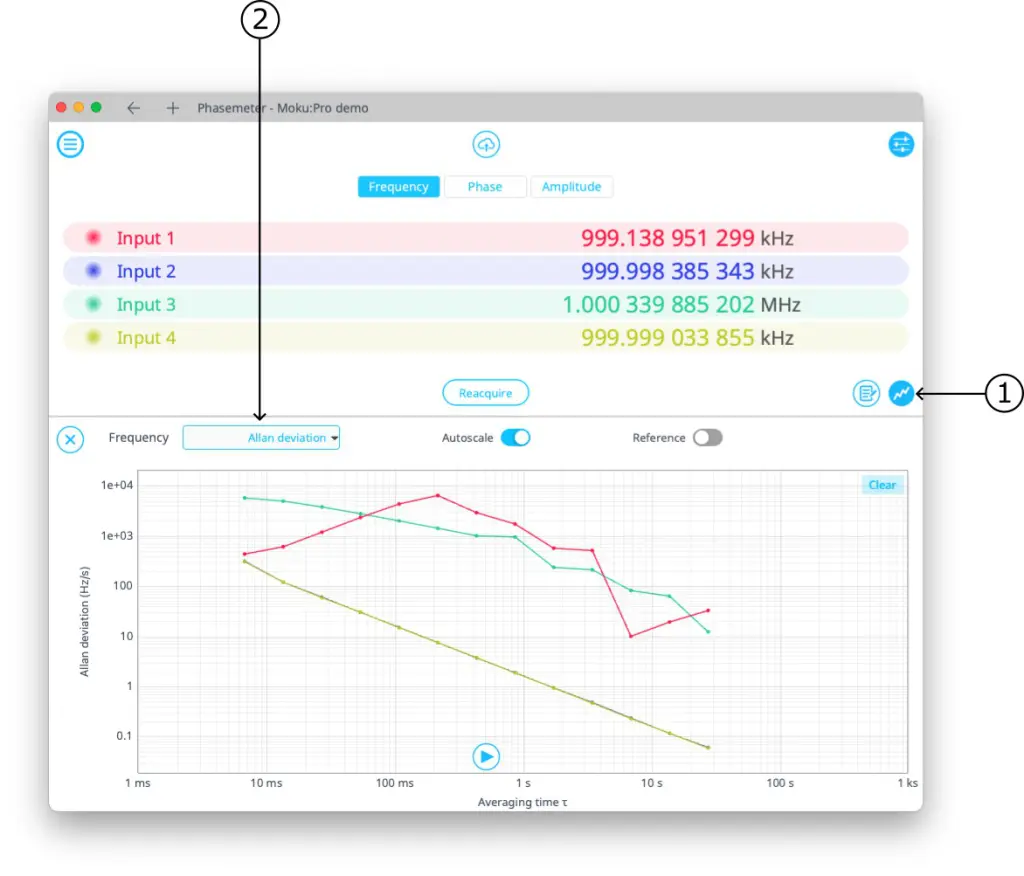
艾伦方差最初是为了评估原子钟中振荡器的稳定性而提出的,它提供了在不同时间尺度上频率稳定性的稳健度量,而标准差等统计数据并未考虑这些稳定性。艾伦方差可以使用 Moku 进行测量,这是一款基于 FPGA 的设备,内置一套可重构的测试和测量仪器。利用 Moku 独特的 相位表 通过仪器,人们可以记录输入周期信号的超精确相位、频率和幅度数据,并实时计算和绘制艾伦方差等统计数据。
下载PDF
将此应用说明保存为 PDF。
艾伦方差简史
你的系统有多稳定?有很多工具可以回答这个问题。1960 世纪 1 年代,David W. Allan 在美国国家标准与技术研究所(当时称为美国国家标准局)研究光学时钟时,发明了一种新的时钟 [XNUMX]。
艾伦发现,随着样本数量的增加,现有的统计指标(例如标准差)对于特定噪声源会出现偏差。这促使他开发了一种新的时域度量,今天该度量以他的名字命名。
由于艾伦当时正在研究光学时钟,因此为原子频率标准领域开发了艾伦方差。因此,该主题的讨论通常仅限于该领域的术语,特别是在表征振荡器的频率稳定性方面。
但是,可以计算任何时间序列的艾伦方差。该系列可以代表信号本身,例如温度传感器的输出,或其任何属性(频率、相位、幅度等),以恒定速率进行评估。因此,艾伦方差在从通信 [2] 到导航 [3] 的各种应用中受到青睐。
Moku 相位表 仪器提供 Allan 方差作为可用的后处理选项之一,如上图所示 Moku:Pro 如下图 1 所示。本说明针对首次遇到该统计数据的用户提供了有关该统计数据的入门介绍。
艾伦方差的数学
艾伦方差的基本原理是将时间序列划分为持续时间相等的部分,并考虑每个部分的时间平均值与前一部分的时间平均值有何不同。如果从整个数据集来看这些差异很小,那么系统在这个时间尺度上是稳定的。
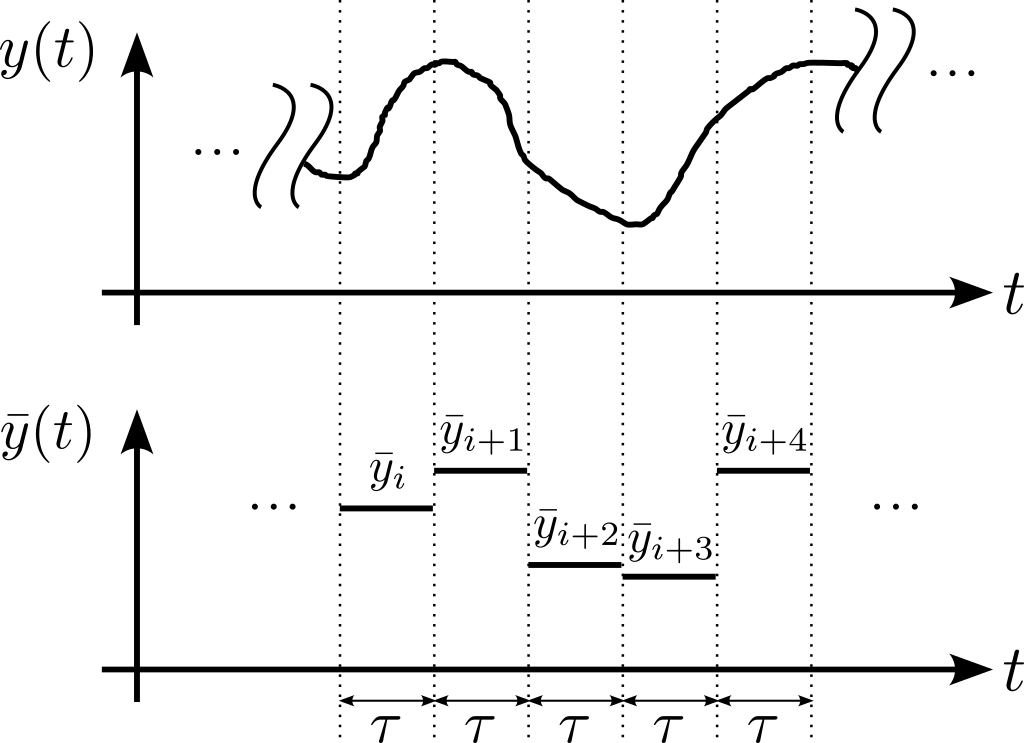
更具体地说,假设我们有一个连续时间序列 \(y(t)\, \),它的 Allan 方差 \(\sigma^2_y(\tau)\, \) 定义为
\(\sigma^2_y(\tau)= \frac{1}{2} \langle(\bar{y}_{i+1}\, – \bar{y}_{i})^2 \rangle, \quad (1) \,\)
其中 \(\langle . \rangle \) 表示期望值(平均值),\(\bar{y}_{i} \) 是 i第 个样本的平均值 y 随观察时间 \(\tau \) 变化(图 2)。艾伦偏差就是艾伦方差的平方根,即 \(\sigma(\tau) = \sqrt{\sigma^2(\tau)} \)。我们可以针对一系列观察时间 \(\tau \) 计算此表达式,以深入了解数据在不同时间尺度上的自相似性(即稳定性)。
从等式 (1) 可以推断,\(\sigma(\tau) \) 的维度与 y。我们将该值解释为两次 \(\tau\) 秒测量之间的预期均方根差 y 间隔 \(\tau \)秒。
例如,假设一个时钟振荡频率为 \(f_0 = 50\,\text{MHz} \)。假设其分数频率差 Y 的艾伦方差定义为
\(Y = \frac{f-f_0}{f_0} = \frac{\Delta f}{f_0},\quad (2) \)
对于 1.23 秒的观测值 (\(\tau = 10\,\text{s} \)) 为 \(10\times10^{-10} \),那么我们预期两次随机选取的连续 10 秒 Y 测量值之间的 RMS 差为 \(1.23\times10^{-10}\)。根据分数频率差的定义,这相当于预期绝对频率差为 \(\Delta f = 6.15\,\text{mHz} \) RMS。
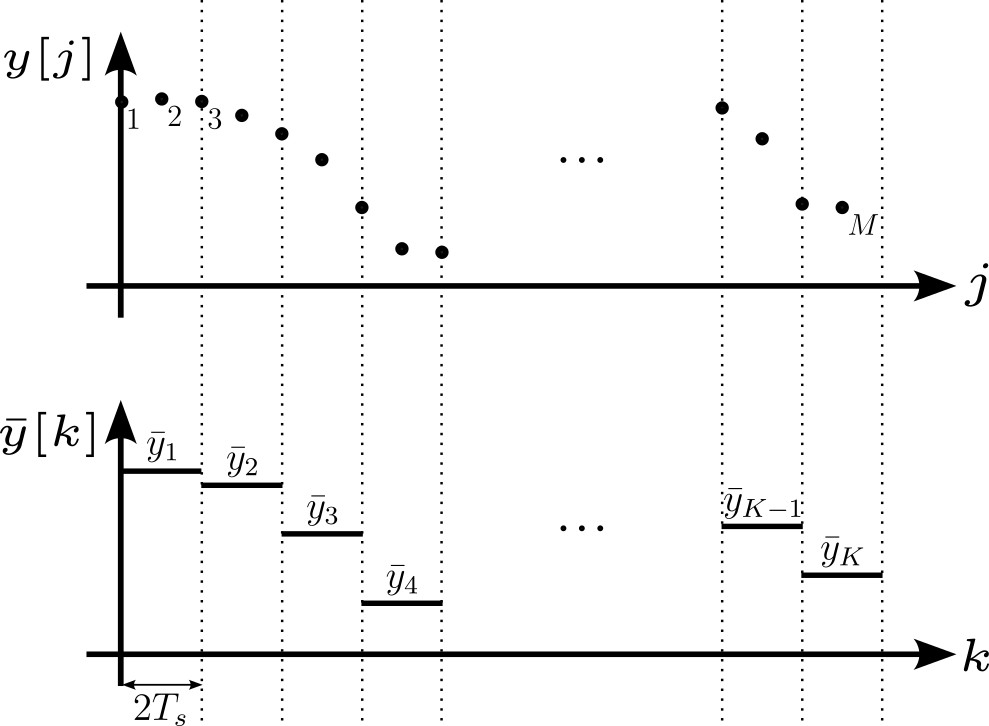
现在考虑一个真实的、有限的、长度数据集的情况 M,以周期 \(T_s\, \) 进行采样(图 3)。在采样系统中,我们无法选择总时间 τ 自由地,所以我们将集合分为 K 长度为 \(\tau = n T_s\, \) 的段,其中 \(n \in \mathbb{N}^+ \, \)。Allan 方差可近似为
\(\sigma^2_y(\tau = nT_s) \simeq \frac{1}{2(K-1)} \sum_{i=1}^{K-1} (\bar{y}_{i+1}\, – \bar{y}_{i})^2.\quad (3) \,\)
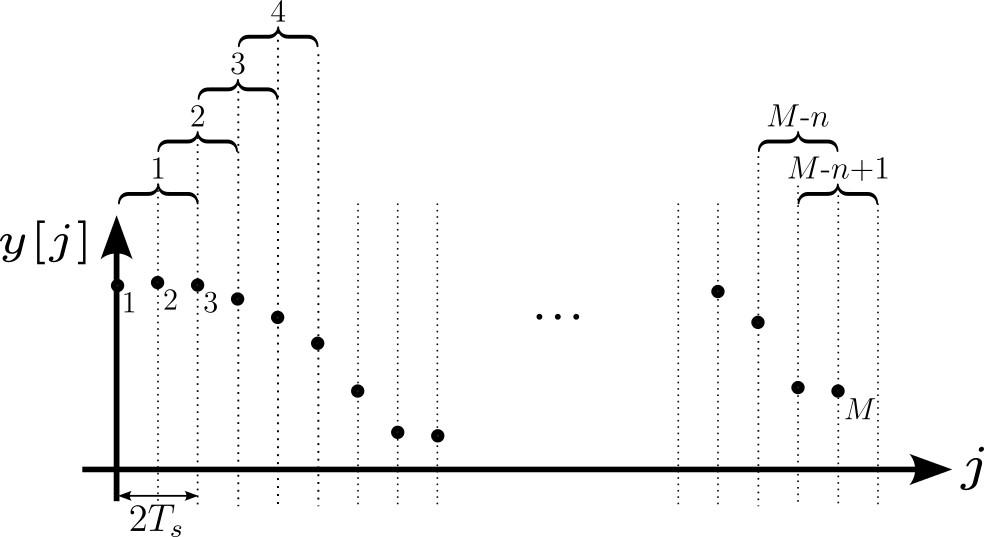
粗略地说,\(\sigma(\tau)\, \) 中的不确定度为 \(\pm \sigma(\tau)/\sqrt{K}\, \)。测量不确定度的完整处理超出了本文的范围,因此请参阅参考文献 [4] 了解更多详细信息。为了提高结果的可信度并更有效地利用宝贵的数据,可以将数据划分为重叠的段(图 4)。这将产生 \(M-2n+1 \,\) 对连续的段,而不是之前的 \(K-1=M/n-1 \,\)。此重叠艾伦偏差由下式给出:
\(\sigma^2_y(\tau = nT_s) \simeq \frac{1}{2(M-2n+1)} \sum_{i=1}^{M-2n+1} (\bar{y}_{i+1}\, – \bar{y}_{i})^2. \quad (4) \,\)
通过积分获得Allan方差
在许多常见的测量场景中,存在一个量 x,其属性为
\(x(t)= \int_0^t\,y(t')\,{\rm d}t'\,.\quad(5)\,\)
例如,在时钟稳定性测量中,时间偏差, X,是分数频率差的积分, Y,以及在测量角度的陀螺仪系统中, θ,是旋转速率的积分, Ω,即
\(X(t)= \int_0^t\,Y(t')\,{\rm d}t'\ \text{和}\ \theta(t)= \int_0^t\,\Omega(t')\,{\rm d}t'\,.\quad (6)\,\)
我们也可以自由计算 x 通过方程(5)的数值积分,即使它不对应于测量的物理变量。
在这种情况下
\(\bar{y}(t):= \frac{1}{\tau}\int_t^{t+\tau}y(t')\,{\rm d}t' \quad (7) \,\)
\(= \frac{1}{\tau} [x(t+\tau) – x(t) ], \quad (8) \,\)
或者用离散的术语来说,
\(\bar{y}_i = \frac{1}{\tau} [ x_{i+n} – x_i ] , \quad (9) \,\)
式(4)变为
\(\sigma^2_y(\tau = nT_s) \simeq \frac{1}{2(nT_s^2)(N-2n)} \sum_{i=1}^{N-2n} (x_{i+2n} – 2x_{i+1}\, + x_{i})^2, \quad (10)\,\)
协调 N = M + 1 是的长度 x。要理解这一点,请考虑 y 可以通过数值导数(差异)构建 x,所以 M = N − 1.
这看起来像是一种抽象的简化,但出于计算效率的原因,方程(10)提供了最常用的艾伦方差公式。请注意,此处的测量值 x 提供艾伦方差 y,不 x.
绘制艾伦方差
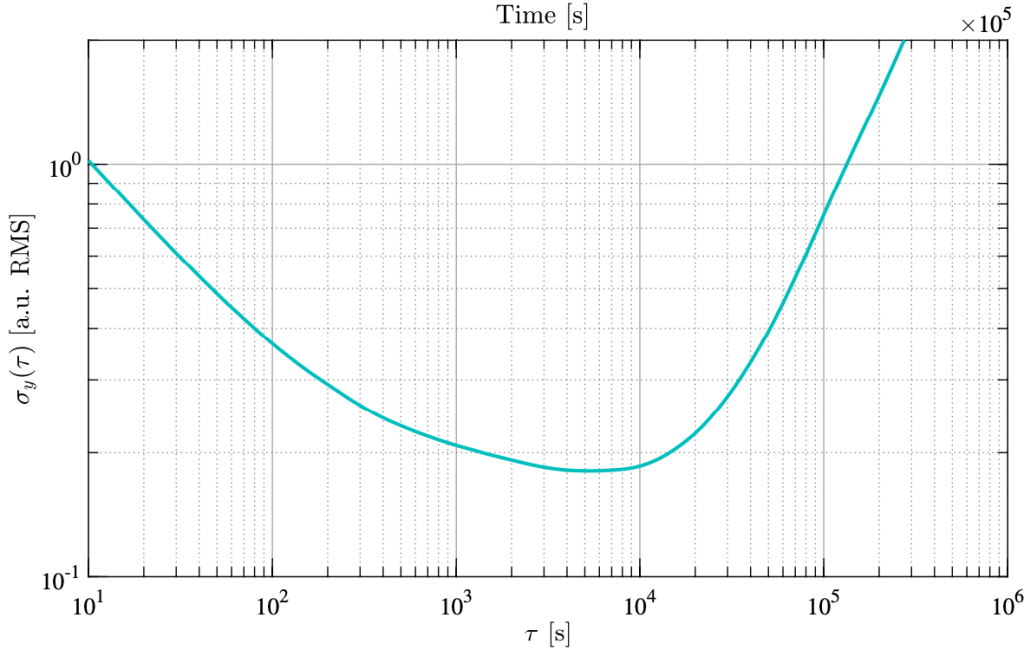
Allan 方差通常针对多个平均时间进行计算,并绘制在双对数刻度上(图 5)。此类图有助于确定给定测量的最佳平均时间。请注意,较长的平均时间并不总是更好,特别是在存在低频漂移的情况下。
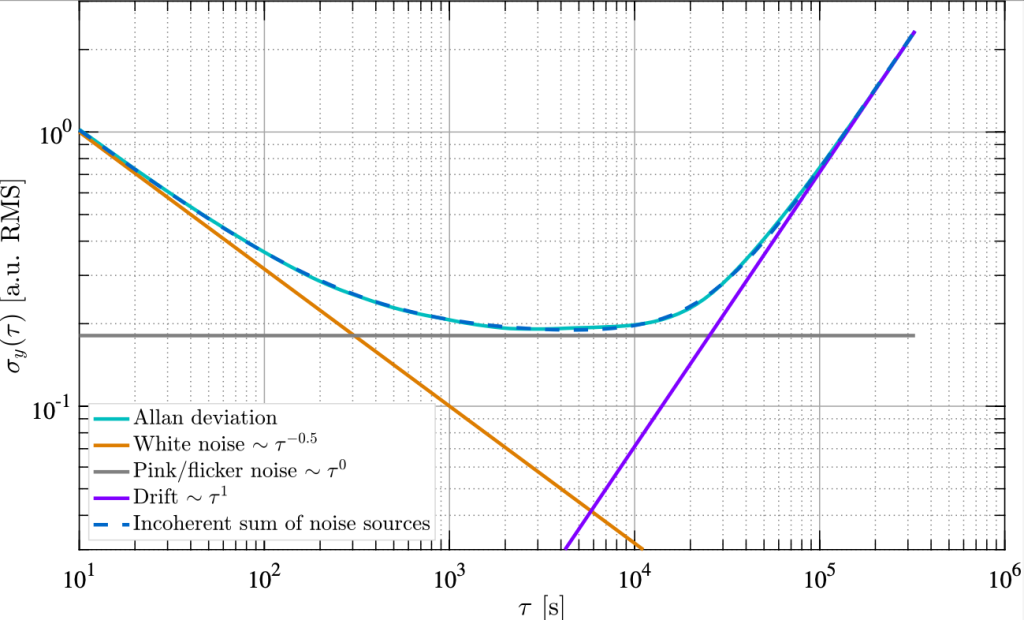
此外,常见的噪声源通常用幂律来描述,幂律在艾伦偏差图上呈现出已知的斜率。例如,白噪声的斜率随平均时间的平方根而减小。因此,我们预期白噪声的斜率为 \(\sigma_{\text{white}}(\tau) \sim 1/ \sqrt{\tau} \,\),事实也确实如此。更一般地,如果某个特定噪声源的功率谱密度的斜率 S 为 \(f^\alpha \,\),则 Allan 偏差的斜率将为 \(\tau^{-(\alpha+1)/2} \,\)。即
\(S_y(f)\sim f^\alpha \Rightarrow \sigma(\tau)\sim \tau^{-(\alpha+1)/2}。 \quad(11)\,\)
这一事实使人们能够轻松确定哪个噪声源在不同的平均时间内占主导地位,建立噪声预算以确定系统性能是否得到充分理解,或量化每个误差源的贡献(图 6)。
表 1 列出了时钟和陀螺仪研究中常见的噪声源的斜率。
表 1:\(\sigma(\tau)\,\)的斜率幂(即, β 其中,\(\sigma(\tau) \sim \tau^\beta \,\)) 适用于特定应用中的各种噪声源 [3, 5]。FM:调频,PM:调相。
功率谱密度与阿伦方差
如上所述,有许多工具可用于描述系统的稳定性。艾伦方差是稳定性的时域指标,而其频域对应指标是功率谱密度 (PSD),\(S_y\)。如果 y 的维度为 \([u] \),则 \(S_y\) 的维度为 \([u_{RMS}^2 / \text{Hz}] \)。当然,艾伦方差 \(\sigma_y(\tau) \) 中包含的信息只是 PSD 的另一种表示形式,并且存在闭式转换(参见 [6] 附录 I)。需要注意的是,只能从 PSD 转换为艾伦方差,而不能反过来。转换公式为:
\(\sigma_y^2(\tau) = \int_0^\infty S_y(f)\, |H(f)|^2\, {\rm d}f = 2 \int_0^\infty S_y(f) \left [\frac{\sin^4{(\pi\tau f)}}{(\pi \tau f)^2} \right ] {\rm d}f. \quad (12) \)
这里,\(H(f) \)是时域采样函数的传递函数。
在这种情况下,需要注意的一个有用的表达是
\(S_{y'}(f)=(2 \pi f)^2 S_y(f),\quad(13)\)
其中 \(y' = \partial y / \partial t \)。例如,可以将相位的 PSD 转换为(\phi)噪声转换为频率之一(f)噪声根据\(S_{f}(f)= f^2 S_\phi (f). \)
结语
在这项工作中,我们介绍了艾伦方差,演示了如何计算和解释它。最初是在振荡器稳定性的背景下开发的,这仍然是该统计最常使用的地方。然而,我们强调它适用于任何时间序列并且在广泛的领域中有用。
艾伦方差可以帮助确定特定测量的理想观察时间和识别主要噪声源。从功率谱密度到阿伦方差的转换也是可能的。
Allan 方差是一种有价值的统计工具,也是 Moku 相位计上可用于数据后处理的众多此类工具之一。这种功能,加上相位计的微弧度精度和通过 Moku:app 的直观界面,使 Moku 成为表征振荡器系统稳定性的出色设备。
超越艾伦方差
正如标准差存在局限性一样,艾伦偏差也并非在所有情况下都是理想的统计量。为了完整起见,这里简要讨论了艾伦偏差的两种常用导数,它们在某些情况下提供了改进的性能。
改良艾伦偏差
我们上文提到,可以根据艾伦偏差图(图 6)上描绘的梯度来识别噪声源。然而,多个噪声源呈现出相同的斜率。具体来说,振荡器白相位调制 (WPM) 噪声和闪烁相位调制 (FPM) 噪声均产生 \(\tau^{-1} \) 的斜率(参见表 1)。然而,WPM 对测量带宽敏感,而 FPM 则不敏感。通过对 n 相邻测量,其中 \(\tau = nT_s \),这 改性 Allan 偏差 \(\rm{mod}\sigma_y(\tau)\) 产生的有效带宽随 \(\tau \) 线性变窄,从而能够区分这些噪声源 [7]。修正的 Allan 方差由下式给出:
\(\rm{mod}\, \sigma_y^2(\tau=nT_s) = \frac{1}{2} \left\langle \left [\frac{1}{n} \sum_{i=1}^n \left (\bar{y}_{i+n} – \bar{y}_i \right ) \right ]^2 \right\rangle, \quad (14)\)
或者,更实际的是,
\(\rm{mod}\, \sigma^2_y(\tau = nT_s) \simeq \frac{1}{2n^2(nT_s)^2(N-3n+1)} \sum_{j=1}^{N-3n+1} \left [ \sum_{i=j}^{j+n-1} (x_{i+2n} – 2x_{i+1}\, + x_{i})\right ]^2, \quad (15)\)
其中 n \in \{1,2,…,N/3 \}. \)
时间偏差
基于修正艾伦偏差的另一个度量是时间偏差,或时间艾伦偏差 \(TDEV(\tau) \),定义为
\(TDEV^2(\tau)= \frac{\tau^2}{3} \rm{mod}\, \sigma_y^2(\tau)。 \quad(16)\)
请注意,这只不过是修正艾伦偏差的“倾斜”版本(对数-对数图上的所有斜率都将减小 \(\tau \) 的一个幂)。归一化因子的选择应使得 \(TDEV(\tau)\) 与 \(n = 1\) 时白相位调制 (WPM) 噪声的标准差一致。
TDEV 也经常用 \(\sigma_x(\tau)\) 表示,明确地描述了 x (而不是 y),这是由于附加因素 \(\tau \) 造成的。
顾名思义,该测量在分布式定时信号的表征中非常有用,它用于描述时钟的相位变化作为平均时间的函数。
案例
[1] DW Allan,“原子频率标准统计”, IEEE 会议录,卷。 54,第 221-230 页,1966 年 XNUMX 月。
[2] L. Hua、Y. Zhuang、L. Qi、J. Yang 和 L. Shi,“使用 Allan 方差的可见光通信中的噪声分析和建模”, IEEE访问,卷。 6,第 74 320–74 327 页,2018 年。
[3] IEEE,“单轴干涉光纤陀螺仪的 IEEE 标准规范格式指南和测试程序”, IEEE 标准 952-1997,pp.1-84,1997。
[4] CA Greenhall 和 W. Riley,“基于有限差异的稳定性方差的不确定性”,2004 年 XNUMX 月。[在线]。可用的: https://ntrs.nasa.gov/citations/20050061319
[5] W. Riley 和 D. Howe,“NIST 特别出版物 1065:频率稳定性分析手册”,2008 年 XNUMX 月。[在线]。可用的: https://tsapps.nist.gov/publication/getpdf.cfm?pub id=50505
[6] JA Barnes、AR Chi、LS Cutler、DJ Healey、DB Leeson、TE McGunigal、JA Mullen、WL Smith、RL Sydnor、RFC Vessot 和 GMR Winkler,“频率稳定性的表征”, IEEE 仪器与测量学报,卷。 IM-20,没有。 2,第 105-120 页,1971 年。
[7] DW Allan 和 JA Barnes,“具有增强的振荡器表征能力的改进的“Allan 方差””,载于 过程。 35 安。频率。控制研讨会。美国陆军司令部,英尺。 Nonmouth, NJ 07703:时间和频率划分,国家标准局,1981 年 XNUMX 月, https://tf.nist.gov/general/pdf/560.pdf.

