



Moku:Pro 激光锁频/稳频器 将 Pound-Drever-Hall 激光锁定技术的多个关键电子元件集成到一台仪器中,使激光锁定过程比以往更加简单,同时不会影响性能。本应用说明将介绍 PDH 锁定的原理,概述使用 Moku:Pro 激光锁定盒将激光锁定到高精细度腔体的过程,并展示使用这种锁定技术时激光频率稳定性显著提高的结果。要了解更多信息, 下载有关 Pound-Drever-Hall (PDH) 激光锁定的终极指南的电子书。
Pound-Drever-Hall 激光锁定技术
在标准实验室环境中,激光器的频率可能会因环境温度、注入电流和量子涨落等一系列因素而发生漂移。因此,激光频率稳定是利用激光进行精确测量的应用中的一个必要过程,例如引力波检测、原子物理和分子痕量气体检测。有多种方法可用于执行激光频率稳定 - 最常见的方法之一是将激光频率锁定到具有稳定机械设置的光学参考腔。这 庞德-德雷弗-霍尔 (PDH) 方法是其中一种方法。它利用反射激光强度的导数作为误差信号,将激光频率锁定在腔谐振点,从而抑制频率波动。 [1].
当将激光器锁定到腔体时,激光器发出的光只有当其波长的整数倍与腔体的往返长度匹配时才能穿过腔体。此时腔体反射光的最小值也随之减小。图1显示了反射强度与激光器频率(相对于腔体谐振频率)之间的关系。然而,由于反射光强度围绕谐振频率对称,并且在谐振频率上下均为正值,因此很难将该信号用作反馈系统中的误差信号。如果激光频率偏离谐振频率,则无法确定是否需要提高或降低激光频率。然而,由于反射信号强度的最小值,反射光的导数在谐振频率的两侧将出现不同极性的零交叉。当频率低于谐振频率时,该导数为负值;当激光频率高于谐振频率时,该导数为正值。可以通过对激光频率进行微小调制(也称为抖动)来测量反射强度的导数。 PDH技术利用反射强度对激光频率的导数作为误差信号,动态调整激光频率以匹配腔体的谐振。
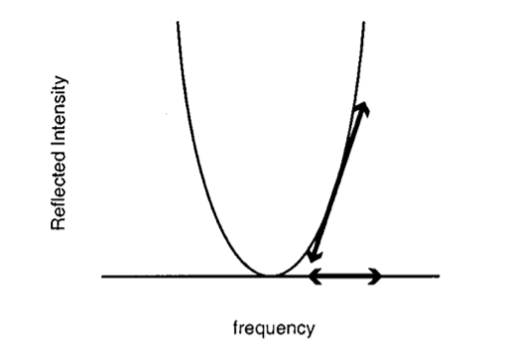
数字 1:光学腔的反射光强度与激光频率的函数关系 [2]
图2展示了PDH激光器锁定系统的组件和布局。其中,频率由本振驱动的电光调制器 (EOM) 进行调制。光电探测器捕获反射光,其输出通过混频器由本振解调。然后,混频信号通过低通滤波器,从调制频率的二次谐波中分离出直流(即极低频)分量。该直流分量用作误差信号,它不仅可以明确指示系统距离谐振点有多远,还可以指示必须朝哪个方向进行调整才能恢复谐振。然后,误差信号被发送到伺服放大器或比例-积分-微分 (PID) 控制器,并进入激光器上的调谐端口,将激光器锁定在谐振腔内。
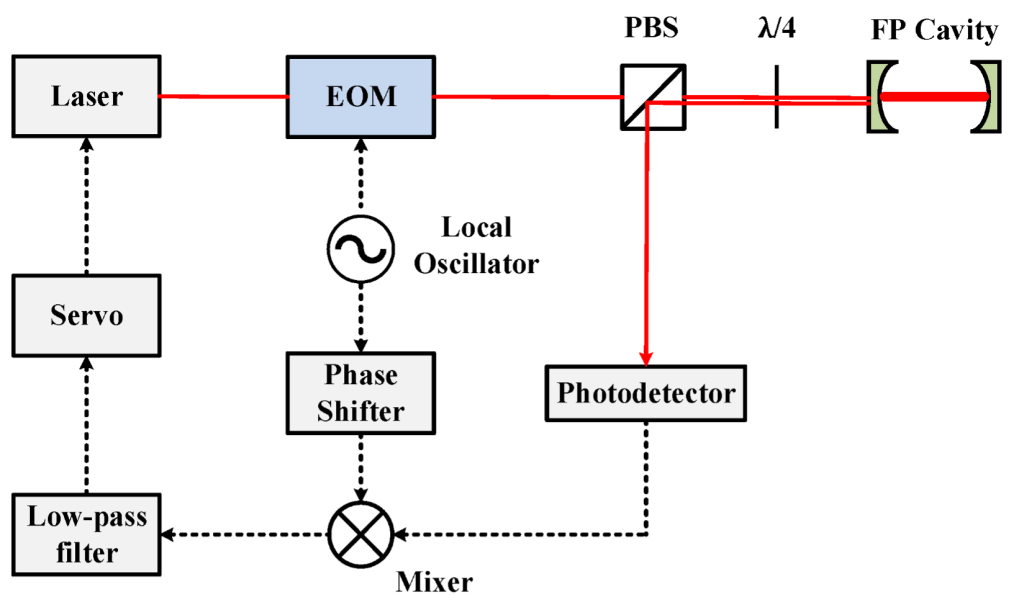
图2:PDH激光锁定技术框图 [3]
Moku:Pro 激光锁盒
传统的 PDH 激光锁定过程需要多种专用的定制电子仪器,包括信号发生器、混频器、低通滤波器、伺服系统和示波器。Moku:Pro 激光锁频/稳频器 将大部分 PDH 电子元件集成到一个紧凑、易于使用的仪器中,提供高精度激光频率锁定。它包括一个 波形发生器 用于扫描和调制激光频率,用于解调误差信号的混频器和低通滤波器,以及两个级联 PID控制器 将快速和慢速控制信号反馈给激光器的执行器,例如压电或温度控制器。使用内置 示波器,用户还可以监控反射光的扫描响应并实时显示PDH信号(图3)。
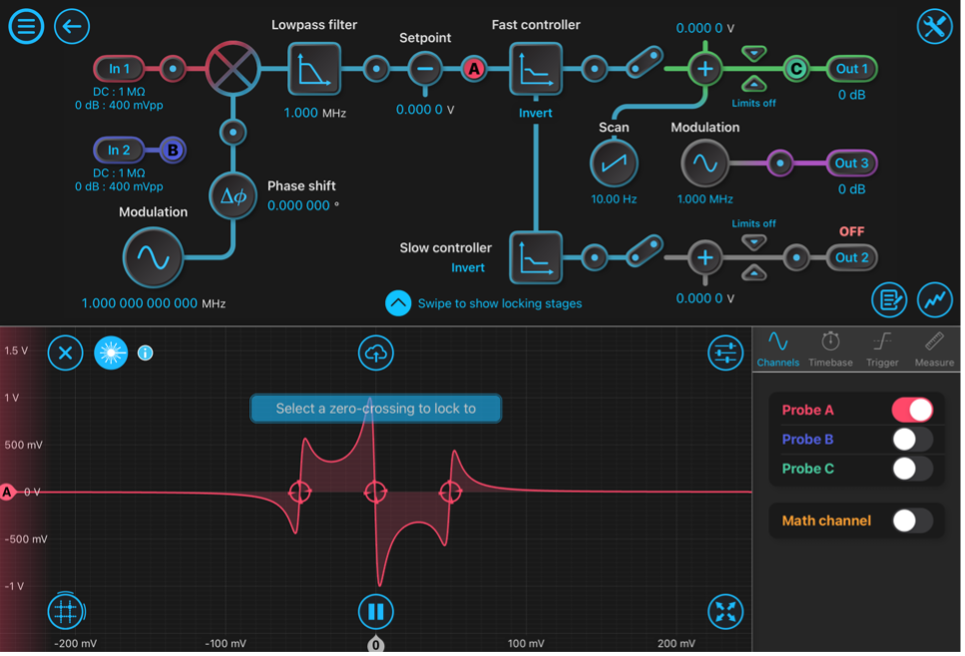
图3:Moku:Pro 激光锁盒的主用户界面
PDH激光锁定实验装置
在本实验中,我们使用 Moku:Pro 激光锁定盒将激光器锁定到高精细度腔体上。图 4 展示了 PDH 激光稳定系统,该系统包含 Moku:Pro.
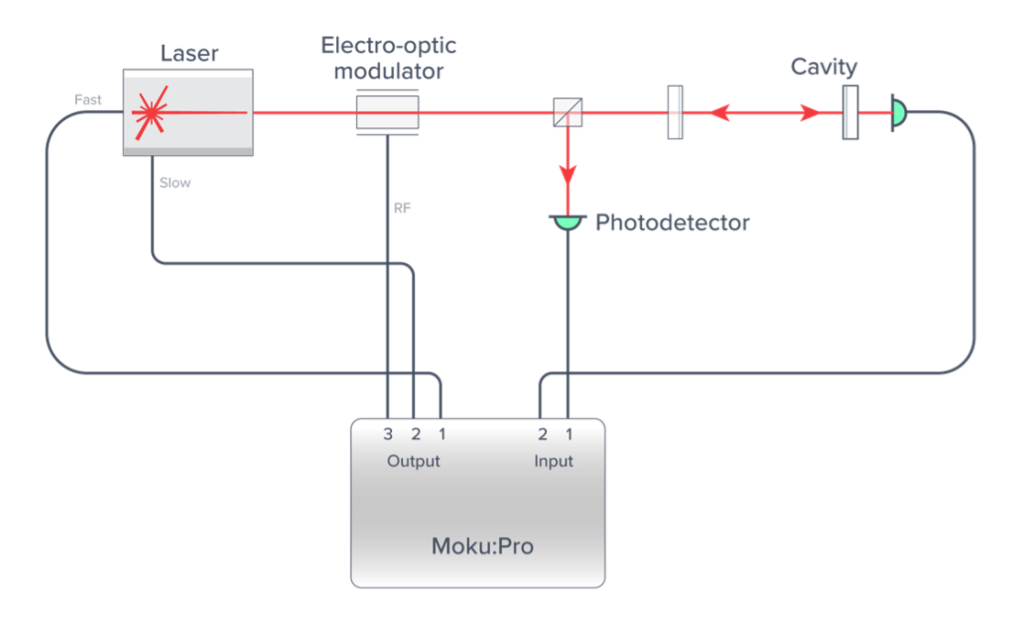
图4:使用 Moku:Pro 激光锁盒进行 PDH 技术的实验装置说明
Coherent Mephisto S 光纤激光器 (1064 nm) 通过电光调制器 (EOM) 进行调制,并重定向到 10 cm 线性平凹腔(精细度 100,000)。 放置两个光电探测器 (PD) 来检测腔体中的透射光和反射光。 在 PD 上检测到的信号被馈送到 Moku:Pro 输入 1(用于反射信号(混频器输入))和输入 2(用于传输信号(监视器))。 然后,快速 PID 的输出 1 直接连接到激光器的压电元件以驱动激光频率,慢速 PID 的输出 2 连接到激光器的温度控制。
图5描述了激光锁箱的配置和设置。一个幅度为500 mV的本振(LO)pp 使用 Moku:Pro 激光锁盒波形发生器生成约 2.885 MHz 的 LO 信号。然后,LO 信号从 Moku 输出 3 发送以驱动 EOM。相同的 LO 信号还用于解调腔体反射,使用数字实现的混频器,然后使用转角频率为 4 kHz 的数字四阶巴特沃斯低通滤波器。使用 Moku:Pro 激光锁盒的集成扫描功能,我们将扫描发生器设置为以 300.0 Hz 的频率向 PZT 执行器(输出 1)输出信号。启用扫描信号后,我们可以使用滤波器输出端的内置示波器探测点查看 PDH 误差信号。然后,我们调整施加到温度控制器的偏移量,并将谐振点置于扫描中间。为了进一步优化误差信号,我们还调整了本振的相位,直到误差信号对称且在谐振点附近具有最大化的线性范围以实现锁定。在本例中,约 10 度的相移产生了最佳误差信号。我们将快速 PID 控制器的比例增益配置为 -113.6 dB,积分器交叉频率配置为 27 kHz,双积分器交叉频率配置为 7.5 Hz。我们将慢速 PID 控制器的积分器交叉频率配置为 70.60 mHz。
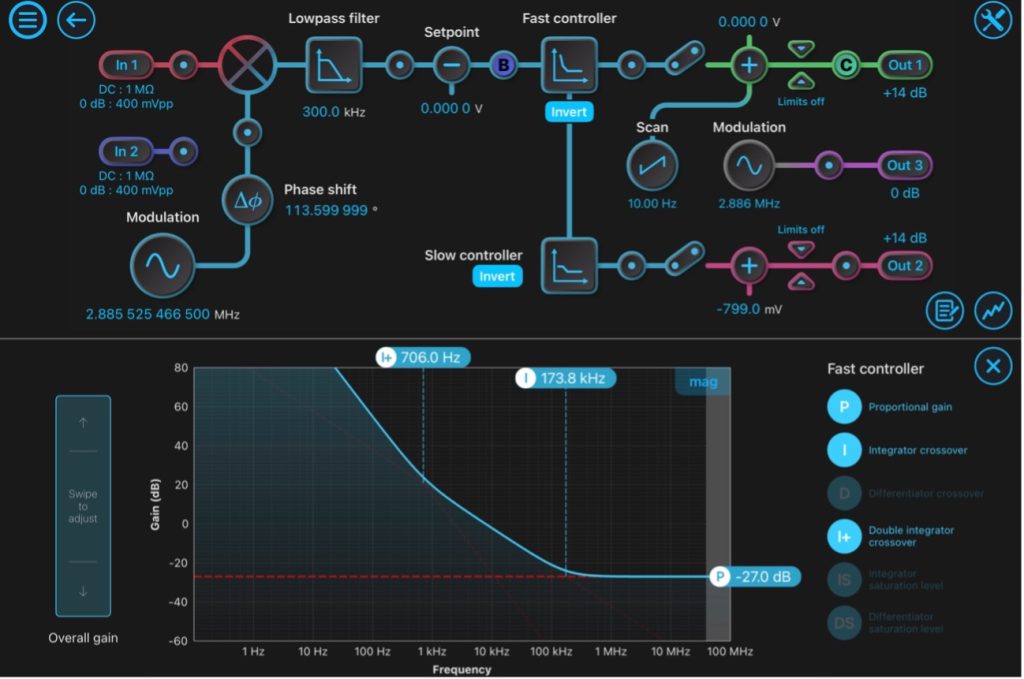
数字 5:快速PID控制器配置
为了启用 PDH 锁定,我们逐渐减小扫描幅度,然后依次启用快速和慢速 PID 控制器。 作为一项高级功能,用户还可以通过配置锁定阶段或使用锁定辅助功能来锁定。 此功能允许用户选择解调误差信号的过零作为锁定点,这将自动启用快速 PID 控制器并将激光频率锁定到腔谐振。 然后,我们禁用积分器饱和,以使激光频率与腔体的直流频率对齐。
结果与讨论
使用内置示波器探测点,我们可以测量误差信号 RMS 并优化整体环路增益,如图 6 所示。增加增益可能会最小化误差信号的 RMS,但增益过高会导致振荡,而增益过低意味着激光频率扰动无法得到充分抑制。
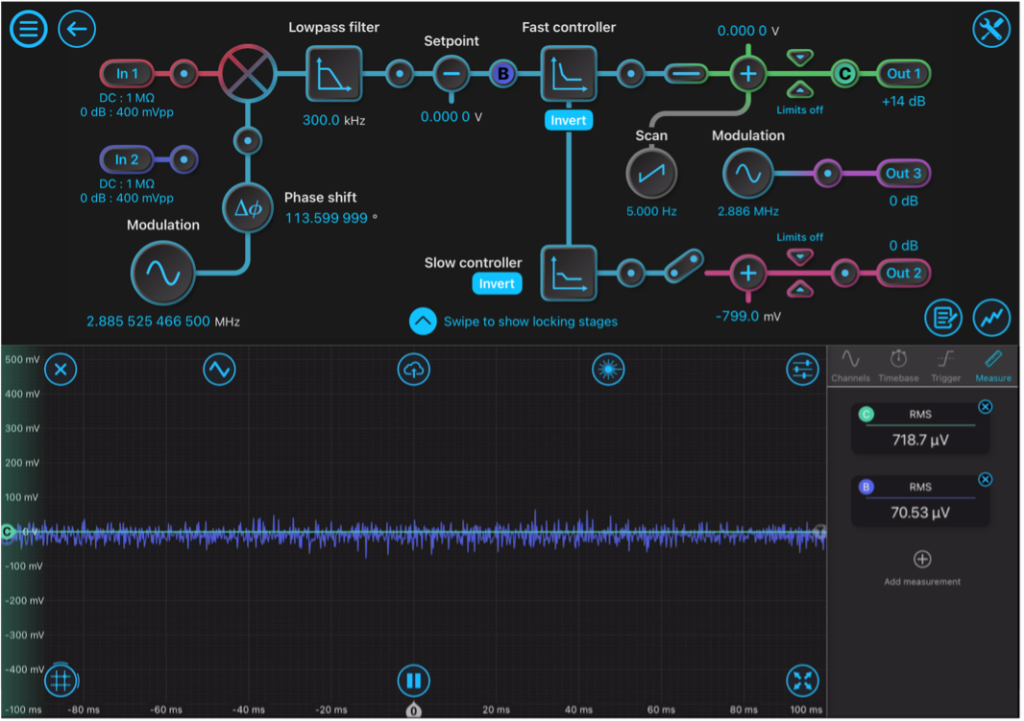
数字 6:测量到的误差信号的 RMS
用户可以使用 Moku:Pro 的多仪器模式功能验证闭环响应,从而进一步优化环路性能。Moku:Pro 可以使用频率响应分析仪,在 Moku:Pro 输出 1 和激光压电元件之间使用加法前置放大器注入扫频正弦扰动,并测量环路内注入扰动的抑制效果。有关频域优化的更多详细信息,请参阅 应用笔记.
我们使用一腔双激光器测试验证了优化的控制回路性能。第二个激光器被锁定到第一个激光器锁上方一个自由光谱范围 (FSR) 的空腔,并使用第二个相同的 Moku:Pro 激光锁箱设置。通过锁定两个独立的频率,将两个激光器与相同的共腔噪声、独立的电子噪声和不相关的激光频率噪声进行比较。这两个锁定激光器之间的残余频率变化与腔间隔件噪声、腔涂层的热噪声以及实验室环境中的常见振动无关。这种噪声仅由控制环路和传感器引起,通过将来自两个激光路径的光组合到高速光电探测器中,与稳定的 GHz 函数发生器混合并使用运行 相位表 仪器跟踪频率偏差。图7比较了使用Moku:Pro将激光器锁定到腔体前后的频率噪声。系统稳定性在0.001 Hz时提高了约10个数量级。频率噪声也降低到XNUMX-2赫兹/√赫兹。
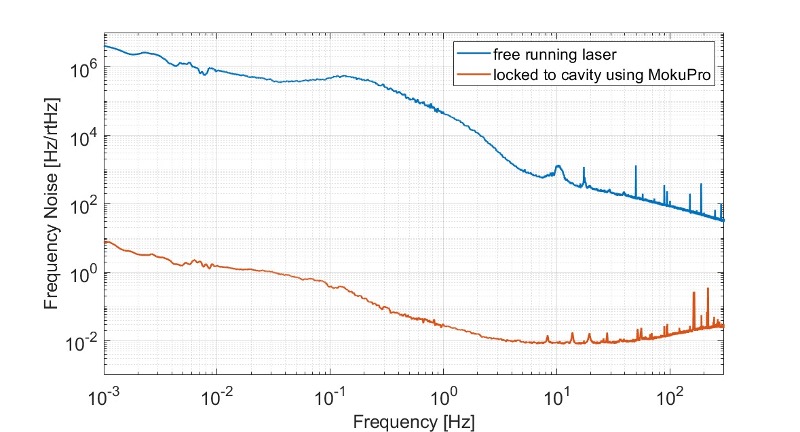
图7:锁定之前(蓝色)和之后(橙色)的节拍音符的频率噪声
致谢
我们要感谢 Andrew Wade、Kirk McKenzie、Emily Rees、Namisha Chabbra、Jue Zhang 和澳大利亚国立大学向我们提供有关他们的实验的详细信息、他们如何使用 Moku:Pro 的解释以及对此应用说明的反馈。
案例
[1] P·德雷弗 et al.,使用光学谐振器实现激光相位和频率稳定,卷。 31、应用。 Phys.B.,I983,第 97-105 页。
[2] ED Black,庞德-德雷弗-霍尔激光稳频简介,卷。 69,美国物理教师协会,2000 年,第 79-87 页。
[3] 刘正昌 et al.,远偏共振激光稳频技术,应用。 科学,2020。


