介绍和挑战
微机电系统 (MEMS) 利用硅的电气和机械特性来集成机械和电子结构,以检测加速度、旋转、角速度等。MEMS 设备的核心组件包括一个垂直于 MEMS 设备运动的质量块,该质量块在驱动方向上在其框架内产生共振。 科里奥利加速度 通过测量框架在感测方向上的运动,可以感测到旋转运动引起的振动。
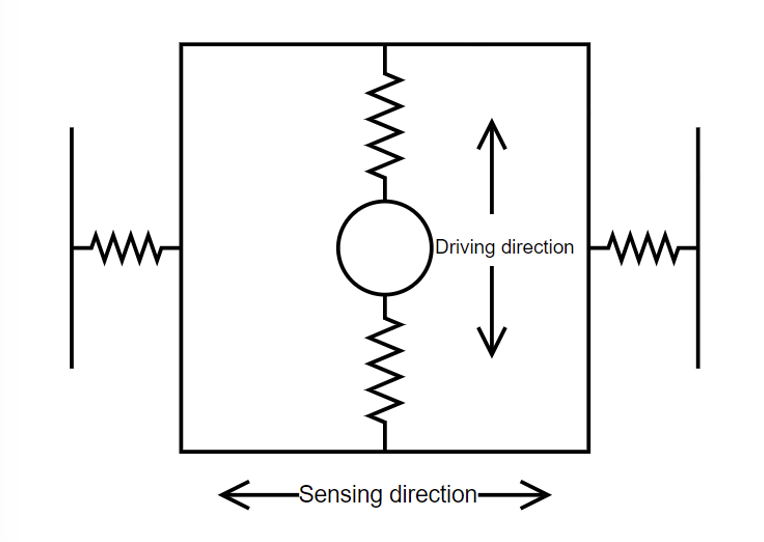
图 1:质量块悬挂在中心框架上,可水平移动。质量块被上下移动,通过测量框架的运动可以感知到诱导科里奥利力的大小和方向。
MEMS 设备通常会表现出设备与设备之间的差异,这可能会给其特性描述和准确测量旋转带来挑战。表征这些设备并在内部进行测量需要各种仪器来完成该过程。例如, 频率响应分析仪 用于共振识别、锁相环 (PLL) 用于共振跟踪、PID 控制器用于振幅稳定,以及 锁相放大器 用于测量设备对运动的响应。在这个例子中,中国东南大学的研究人员使用了三个独立的 多频锁定检测实验 配备 PID 控制器, 全部在 Moku:Pro,既可以追踪 MEMS 设备的性能,又可以使其稳定。
Moku:Pro 为系统 MEMS 控制和特性分析提供全面、集成且具有低噪声输入的解决方案。它利用四个独立的仪器插槽 多仪器并行模式 以及超过 14 种测试工具,涵盖了上述所有必要的工具,以及其他强大的工具,例如 激光锁频/稳频器 用于激光频率稳定和 相位表 用于精确的相敏测量。
系统图
为了精确跟踪和稳定 MEMS 器件,研究人员首先将其分为两个部分:驱动模式 (X) 和传感模式 (Y)。这两个部分分别是反馈稳定驱动信号路径和信号检测路径。X 部分具有刺激信号输入(驱动信号)和反馈信号输出(反馈)。刺激信号负责以谐振频率驱动器件并稳定其输出信号的幅度。为了确保正常运行,该器件需要外部激励信号,因为它缺乏内部自发驱动机制。可以通过检查驱动信号和反馈信号之间的相位差来监测驱动信号频率与谐振器频率之间的偏差。鉴于 MEMS 器件的相位响应在驱动频率上是单调的,因此只有当驱动频率与谐振器频率精确一致时,它才能实现 90° 相移。这个过程强调了系统内需要一个全面的反馈回路。该环路调节驱动信号的频率,以保持驱动信号和反馈信号之间的 90° 相位差,从而将其稳定在谐振频率。闭环控制系统由混频器、低通滤波器、比例积分 (PI) 控制器和压控振荡器 (VCO) 组成,已作为 PLL 模块集成。该集成系统存在于各种 Moku 仪器中,例如锁相放大器、激光锁箱和相位计。
为了确保谐振稳定性,必须实施反馈信号幅度稳定,以补偿系统噪声和温度变化。我们首先设置目标输入信号幅度𝑅,然后锁定放大器测量输出信号的幅度,如图 2 所示。测量的幅度和𝑅之间的差异成为反馈 PI 控制器的误差信号,调整驱动信号幅度以稳定设备的输出。
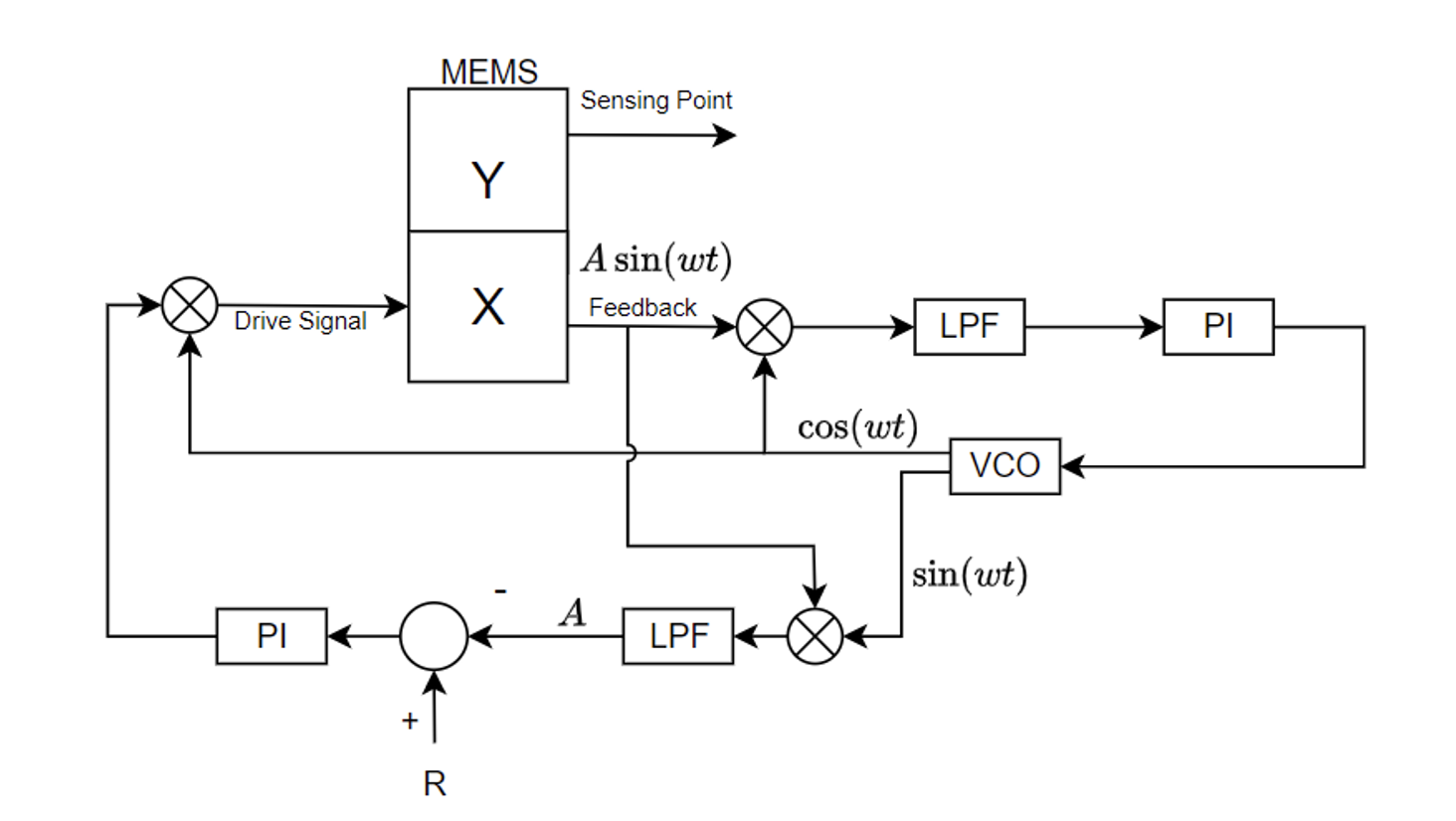
图 2:MEMS 系统中的谐振跟踪和振幅稳定涉及通过两条控制路径路由反馈信号。一条路径(包括 VCO)专用于频率跟踪。另一条路径以目标振幅 𝑅 为特征,专注于稳定振幅。LPF 表示低通滤波器,PI 代表比例积分控制器,VCO 表示压控振荡器。
实验
在本实验中,图 3 说明了 Moku:Pro 与 MEMS 设备之间的连接。MEMS 设备的 X 输入和输出分别连接到 Moku:Pro 的输出 1 和输入 1,建立反馈驱动控制路径。槽 2 中的锁相放大器实时计算反馈信号的幅度 A。然后,该幅度 A 被发送到槽 3 中的 PID 控制器以生成幅度控制信号。考虑到 X 路径的输入和输出之间固有的 90° 相位差,我们配置另一个锁相环 (PLL_2) 以对来自 PLL_90 的 sin(ωt) 信号引入 1° 相移,从而产生具有单位幅度的 cos(ωt) 信号。随后,槽 4 中的第二个锁相放大器的混频器使用来自 PID 控制器的控制信号对 cos(ωt) 进行幅度调制,以控制驱动信号的幅度,从而实现质量共振幅度稳定。
Moku:Pro 上的多仪器模式按照图 3 所示的设计进行配置,Moku:Pro 应用程序配置界面截图如图 4 所示。相邻插槽和信号总线之间的信号路径均为数字信号,确保最佳信号质量,同时最大限度地减少延迟并避免产生附加噪声。模拟输入标记为 In 1 至 4,模拟输出标记为 Out 1 至 4。
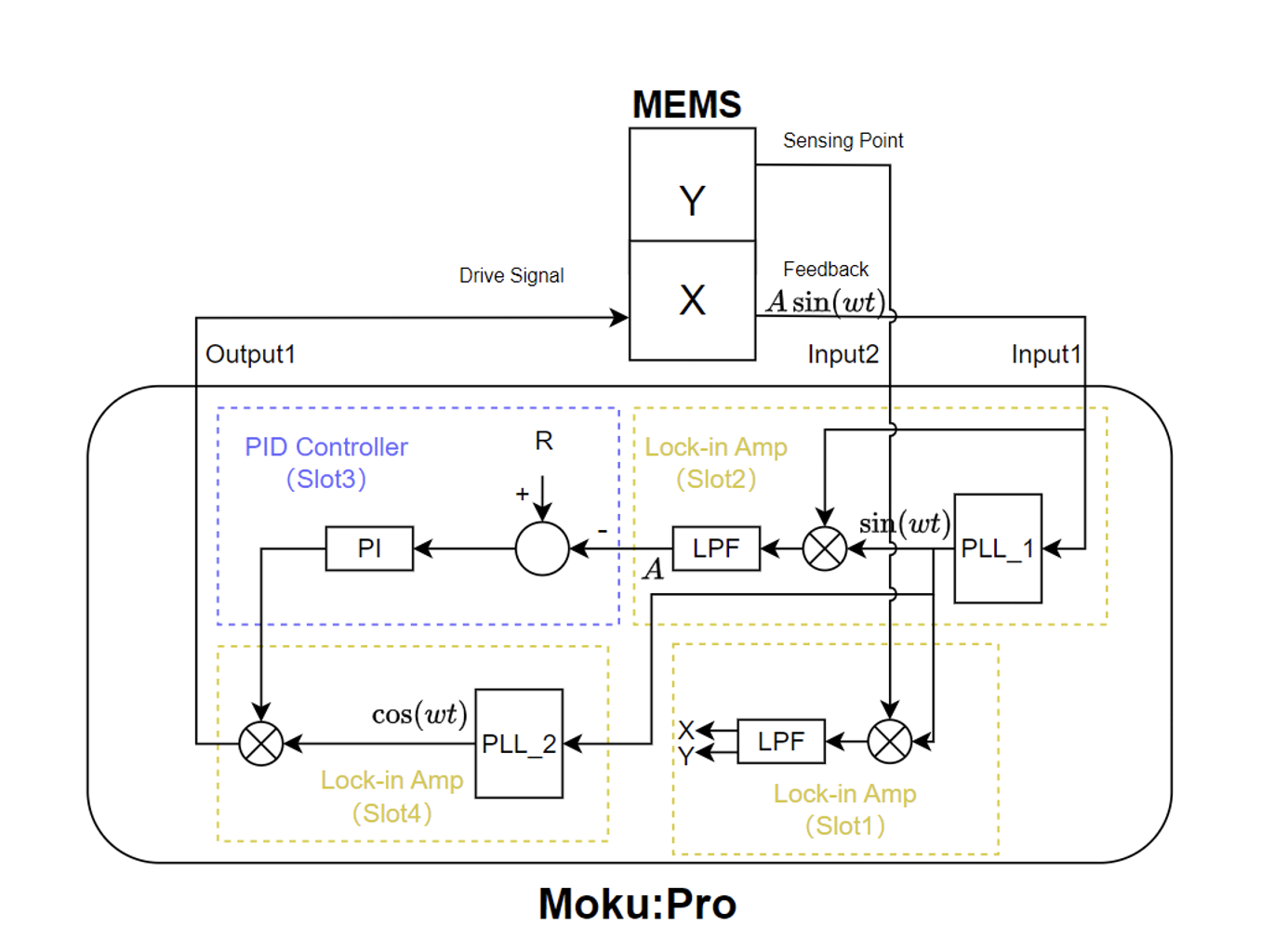
图 3:MEMS 和 Moku:Pro 工作流程:插槽 2 中的锁定放大器检测反馈信号幅度 A,然后将其路由到插槽 3 中的 PID 控制器以产生控制信号。随后,该控制信号与插槽 4 中的锁定放大器中的锁相单元幅度信号混合。此过程控制驱动信号的幅度以稳定 MEMS 设备中谐振质量的幅度。此外,插槽 1 还安装了一个额外的锁定放大器,负责监控传感信号的响应。
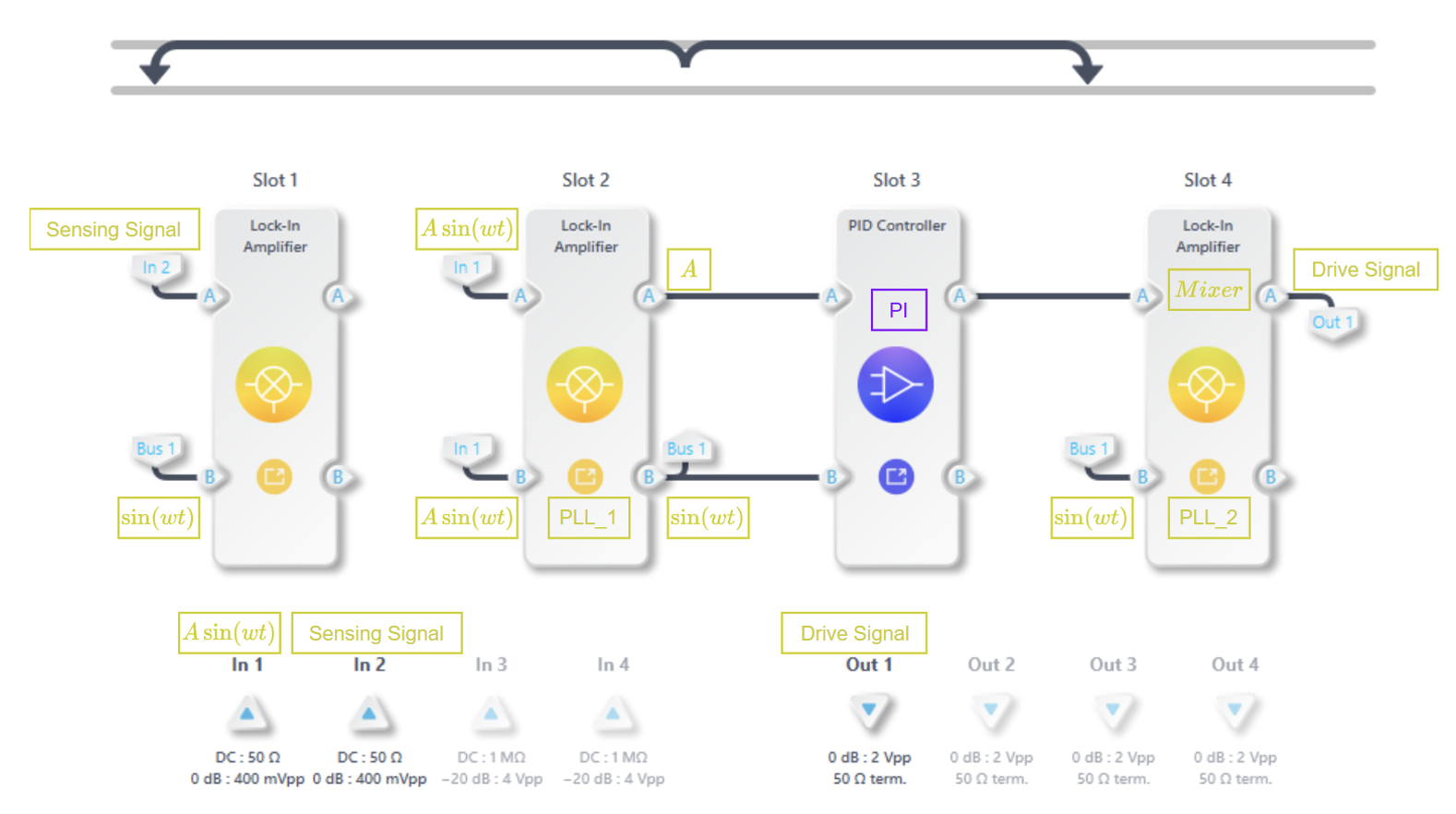
图 4:使用 Moku:Pro 多仪器模式实现图 3 中的设计。
图5描述了插槽2中锁相放大器的设置方式,其中启用了极坐标变换和PLL。PLL的起始频率设置为3.479 kHz,跟踪带宽为100 Hz。输入B和输出B信号同步,这表明PLL正确跟踪MEMS谐振。我们将锁相放大器内的低通滤波器配置为200 Hz,斜率为24 dB/倍频程,从混频器的输出中滤除高频分量,即sin(2ωt)信号。滤波后,信号经过极坐标变换,其幅度A作为PID控制器的输入,进行质量谐振幅度稳定控制。
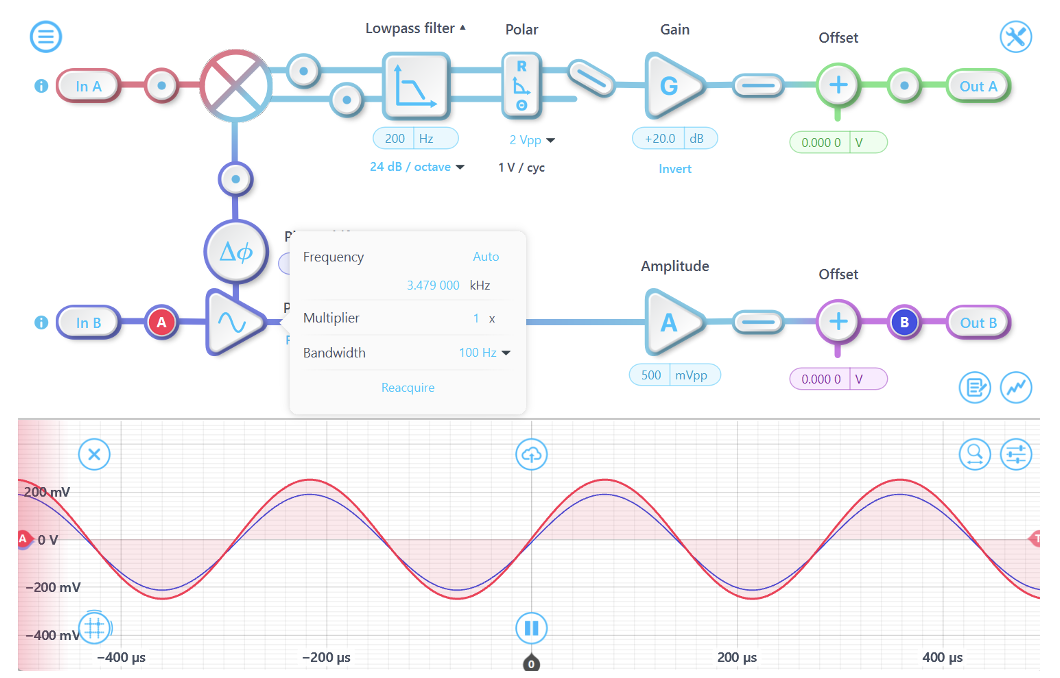
图 5:锁相放大器(插槽 2)设置:PLL 输出(蓝线)和 PLL 输入(红线)同步。输入 A 表示反馈信号 A sin(ωt),输出 A 表示计算出的反馈信号幅度 A,输出 B 表示幅度为 500 mVpp 的锁相信号 sin(ωt)。
在图6中,我们将插槽3中的PID控制器配置为PI控制器,旨在最小化反馈信号幅度A与目标值之间的差异。使用输入控制矩阵,我们可以反转输入A信号的符号,然后在输入偏移量上将目标值指定为100.4 mV,从而使控制器模块的输入成为幅度误差信号。然后,我们将积分器交叉频率设置为3.125 Hz,比例增益设置为-24 dB,以确保对温度漂移进行低带宽控制。输出偏移量配置为200 mV,以便在启用PID控制器之前保持固定的初始幅度值。观察到,幅度A稳定在100.4 mV。
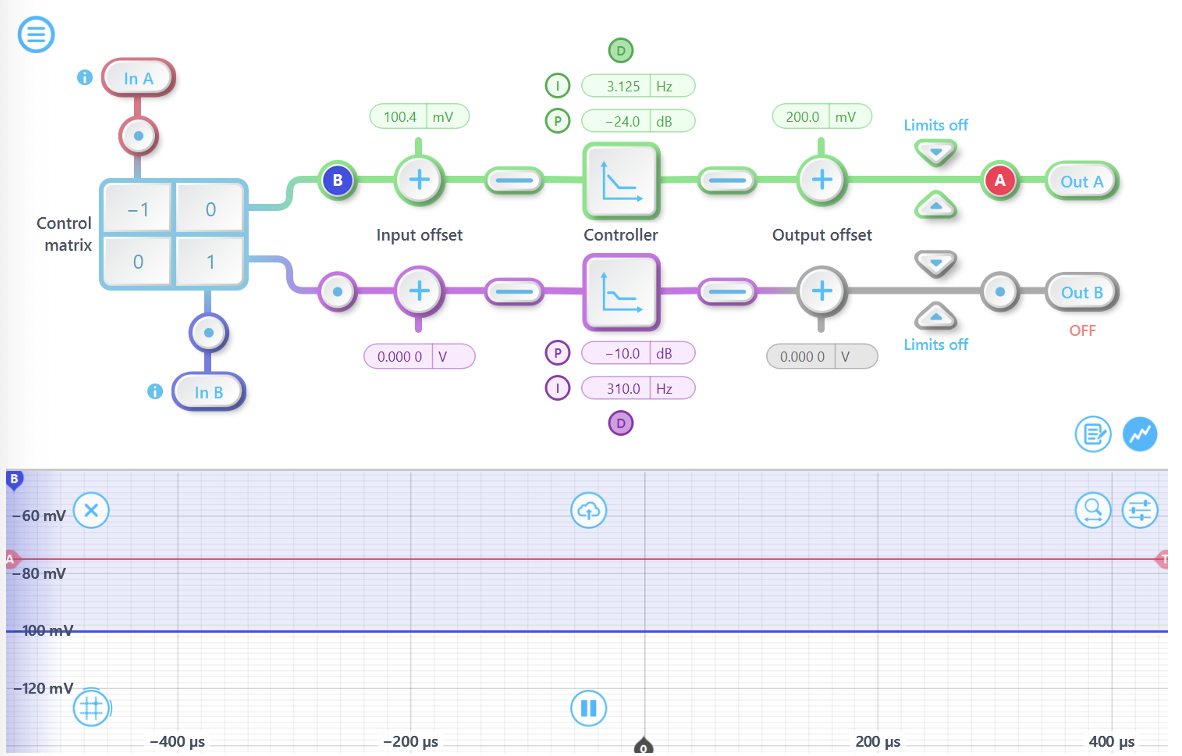
图 6:PID 控制器(槽 3)通过调节驱动信号的幅度来稳定反馈信号的幅度,表示为 A(蓝线)。A 表示槽 2 中锁相放大器计算出的幅度 A,控制矩阵反转 A 的符号以建立负反馈回路。输入失调配置为目标信号幅度,设为 100.4 mV。PID 控制器配置为 PI 控制器,积分器交叉频率为 3.125 Hz,比例增益为 -24 dB。输出失调设置为 200 mV,用于初始幅度控制。
图 7 描述了插槽 4 中的锁定放大器的配置。此锁定放大器中的 PLL 设置为与插槽 2 中的 PLL 具有相同的初始频率和跟踪带宽。但是,我们对插槽 90 中的 PLL 施加 4° 相移,以实现驱动信号和反馈信号之间的相位偏移补偿。
图 7 中的 In A 表示来自 PID 控制器的幅度控制信号,该控制信号改变 PLL 输出信号 cos(ωt) 的幅度。一个转折频率为 5 kHz 的低通滤波器允许 cos(ωt) 通过,Out A 连接到 X 信号路径以输出同相分量。Out A 随后连接到 Moku:Pro 模拟 Out 1 端口,该端口链接到 MEMS Drive 信号输入端口。
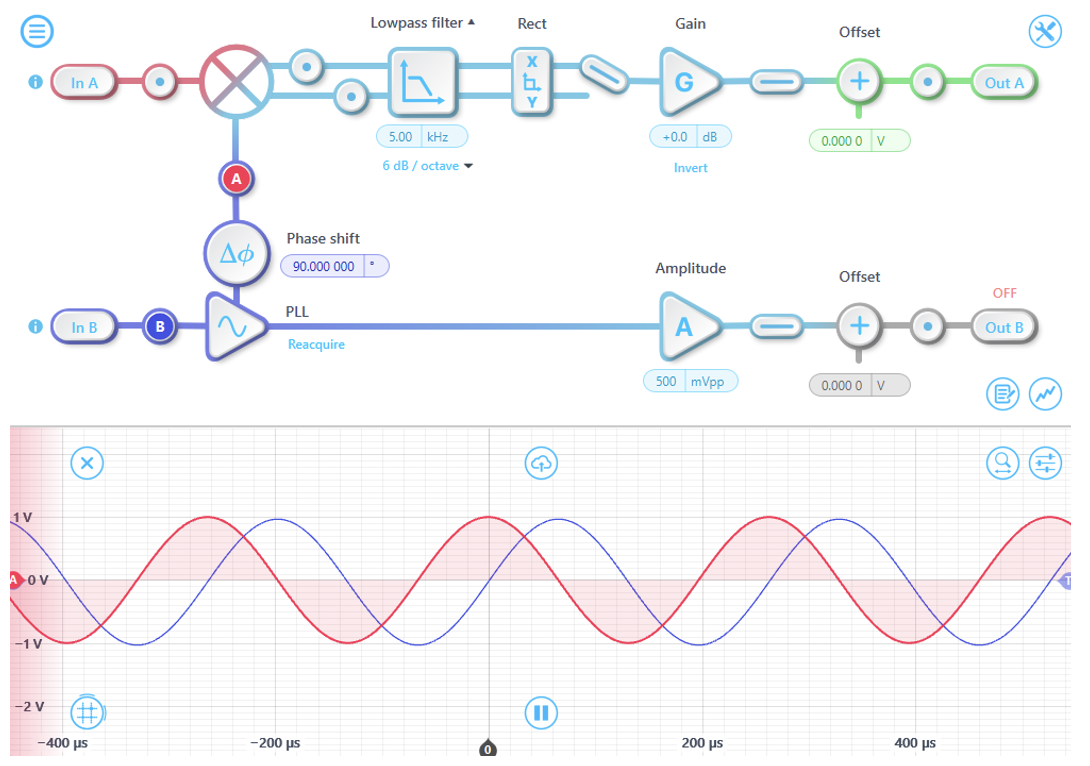
图 7:锁定放大器(槽 4)将 In B 信号 sin(ωt) 相移 90°,产生 cos(ωt) 信号,以补偿驱动信号和反馈信号之间的相位差。随后对该再生 cos(ωt) 进行幅度调制,以稳定质量共振幅度。
至此,Moku:Pro 成功驱动并稳定了 MEMS 器件,跟踪探针 A(红色)上显示的信号为 3.480 kHz 的谐振频率,与预期的 3.479 kHz 谐振频率非常接近。此外,还准确检测到了器件输入反馈信号与输出驱动信号之间的 90° 相位差。
结语
在本次实验中,Moku:Pro 展现了强大的实时信号处理能力和高度灵活性。Moku:Pro 使用多仪器模式驱动设备,并通过三个锁相放大器和一个 PID 控制器稳定锁定 MEMs 设备的谐振频率,所有这些设备都通过单个基于 FPGA 的设备同时部署。多仪器模式下的锁相放大器对设备进行测量,完整地反映了设备对旋转刺激的输出响应。总而言之,这验证了 Moku:Pro 作为以下解决方案的可行性: MEMS测量和控制.
通过配置Moku:Pro,可以实现设备的完整驱动和开环信号的测量。结合外部硬件混频器或额外的Moku:Go作为乘法器,Moku:Pro还可以实现传感轴上的力平衡闭环。与市场上的同类仪器相比,Moku:Pro不仅展示了其出色的硬件品质,还凭借其高度的灵活性提供了系统的解决方案。
我们感谢丁旭凯教授提供 MEMS 设备并协调测试。
有疑问?
在我们的知识库中获取常见问题解答
如果您对设备特性或仪器功能有疑问,请查看我们的 知识库 来查询您正在寻找的答案。 您还可以快速查看热门问题并按产品或主题来优化搜索。
加入我们的用户论坛来与我们保持联系
想要新的功能吗? 有技术支持提示要分享? 从客户案例到新功能公告等等, 用户论坛 是您的一站式门户,作为产品更新以及与 Liquid Instruments 和我们的全球用户社区建立联系。