在本应用说明中,我们讲述了我们的一位客户如何用 Moku:Lab 替换几个复杂的电子设备并使用 Pound-Drever-Hall (PDH) 技术将 Innolight Prometheus 激光器锁定到腔体的真实故事。


PDH技术简介
Pound-Drever-Hall (PDH) 技术由 RV Pound、Ronald Drever 和 John L. Hall 于 1983 年首次提出1. 将激光器的发射光频率与法布里-珀罗腔匹配是一种广泛使用的方法。 当激光射入腔体时,它会被反射、透射或吸收。 腔的长度越接近激光半波长的精确数量,传输的激光能量就越多。 不幸的是,激光的频率和腔的长度都会根据环境温度、注入电流和量子涨落等一系列因素不断变化。 PDH 锁定使用从腔体反射的光来产生一个误差信号,该信号可用于对腔体的长度或激光的频率进行微小的改变,以便它们保持匹配并最大化传输。
PDH 技术使用光电探测器捕获反射光,该反射光已由电光调制器 (EOM) 调制,并将该信号与本地振荡器混合,然后将其通过低通滤波器以分离信号的分量。不仅可以明确指示系统距共振有多远,还可以明确指示必须朝哪个方向进行调整才能恢复共振。然后,读出信号被发送到比例积分微分 (PID) 控制器以创建误差信号。有关 PDH 技术理论的详细信息可以在一些评论论文和论文中找到。要执行 PDH 锁定,需要多种专用和定制的电子仪器,包括信号发生器、混频器和低通滤波器。这 Moku:Lab Laser Lock Box 将大部分 PDH 电子器件集成到一个单一、紧凑、易于使用的仪器中,提供高精度激光频率锁定。
实验装置
莫库:实验室 激光锁频/稳频器 集成了波形发生器、混频器、低通滤波器和两个用于 PDH 技术的级联 PID 控制器。通过调节激光腔的长度,可以监测反射光的幅度,并在屏幕上实时显示PDH信号。用户只需轻按一下即可将激光器锁定到任何零交叉点。
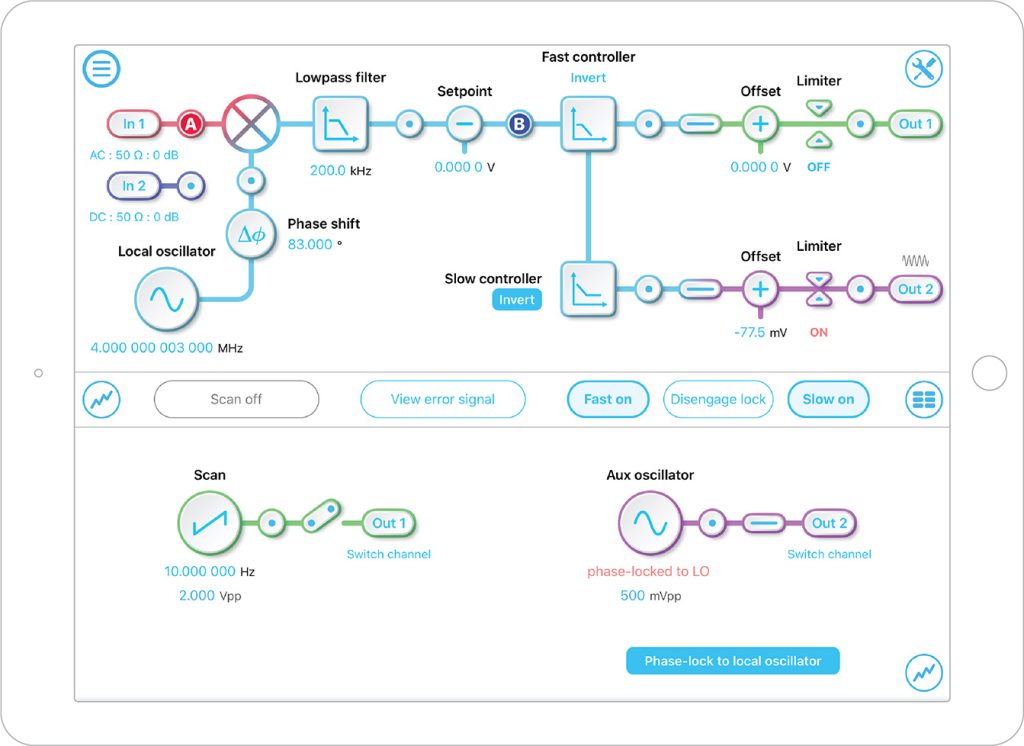
图1: Moku:Lab 激光锁盒的主要用户界面
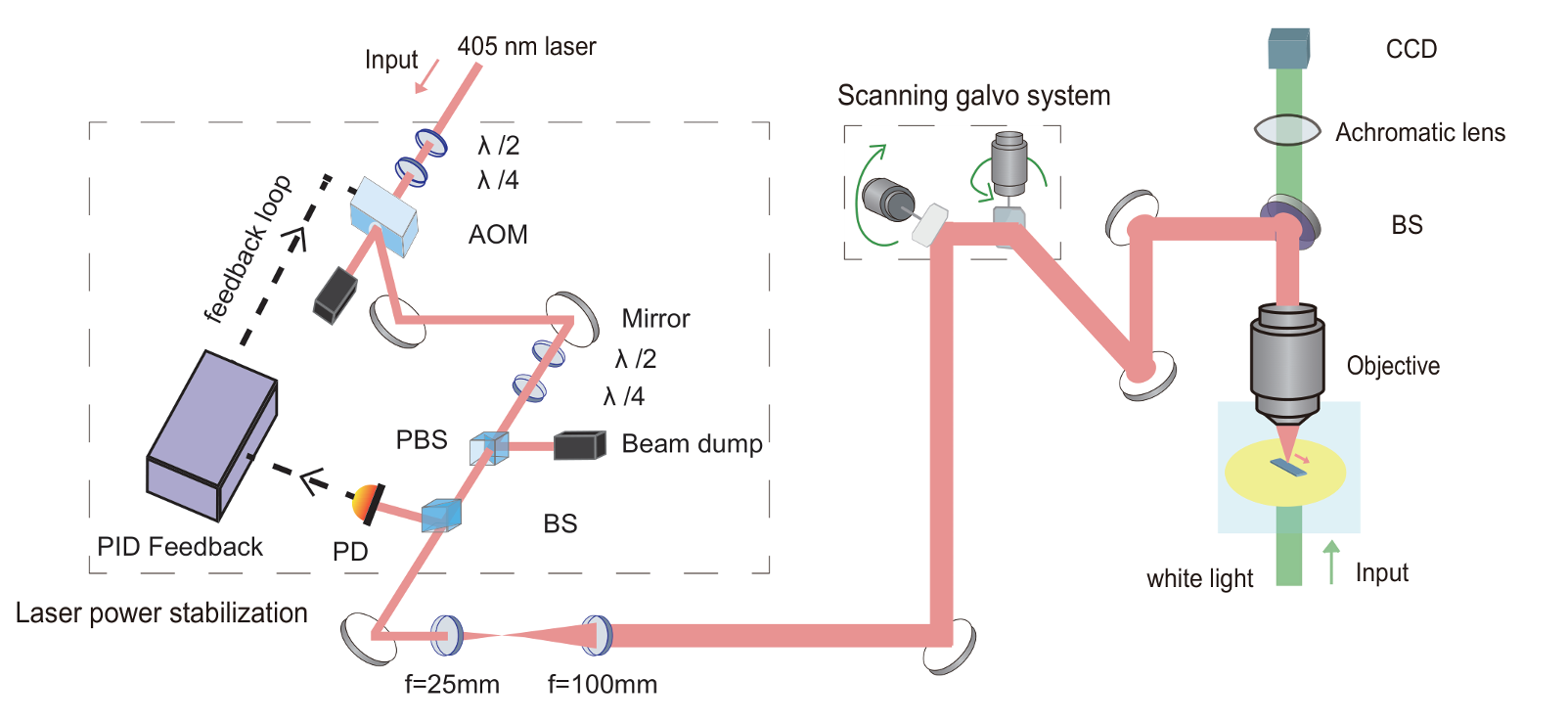
在示例设置中,Prometheus 激光器(Innolight,20NE)由电光调制器(EOM, iXBlue,NIR-MPX-LN-0.1),并重新定向到三镜行波腔(168 mm,即FSR为1.78 GHz),线宽为190 kHz。反射光由输入耦合器的瞬时反射捕获。两个光电二极管(PD,Thorlabs, 掌上电脑05CF2) 被放置用于检测腔体发射和反射的光。在 PD 上检测到的信号被馈入 Moku:Lab 输入 1(混频器输入,交流耦合 @ 50 Ω)和 2(监视器,直流耦合 @ 50 Ω)。使用 Moku 激光锁盒波形发生器生成 500 MHz 下 3.0 mVpp 的本振 (LO) 信号。然后,LO 从 Moku 输出 2 发送,通过偏置 T 型接头(Minicircuits, ZFBT-6G+).
还使用了 LO 波形的数字副本,通过数字实现的混频器解调来自光腔的反射响应,该混频器后跟一个转折频率为 4 kHz 的数字四阶巴特沃斯低通滤波器。通过扫描整个腔谐振频率的激光频率并调整相位延迟来调整混频器处 LO 的相移,直到误差信号峰峰值电压(斜率)最大化。快速 PID 控制器的积分器单位增益频率(300.0 dB 点)配置为 0 kHz,初始积分器饱和转角为 5.8 Hz。然后,快速 PID 的输出 100 直接连接到激光器的压电器件以驱动激光频率。在扫描模式下,还从该输出产生斜坡信号以发现腔谐振。慢速 PID 控制器的比例增益配置为 -1 dB,积分器交叉频率为 32.2 mHz。然后,该低频 PID 控制器输出通过输出 200 处的 Bias-Tee 进行分离,并送入激光器的温控 BNC 接口。2 dB 的衰减器(Minicircuits, HAT-20+) 也被放置在这个激光温度执行器的线上,以降低其灵敏度。
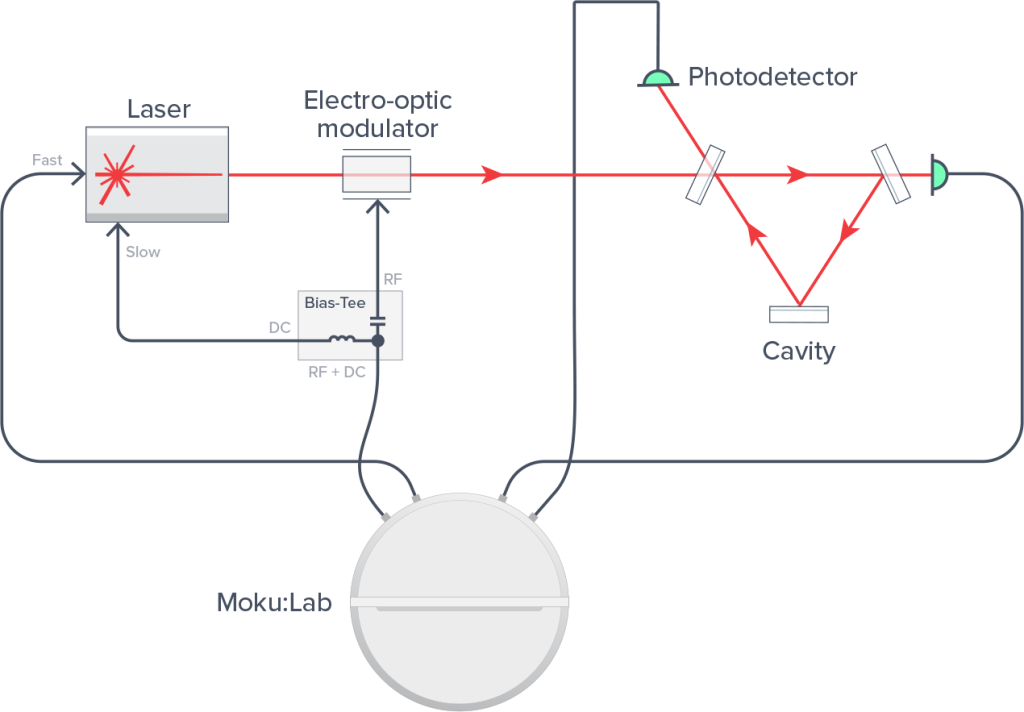
图2: Moku:Lab 的 PDH 技术实验装置
采用 Moku:Lab 的 PDH 技术激光频率锁定
为了实现PDH锁定,首先在激光锁定模式下通过斜坡扫描生成PDH读出信号。调整慢速温度偏移,使腔体谐振频率接近扫描范围的中间值。然后,单击中间的过零点作为锁定点。这将启动快速PID控制器,并将激光频率锁定到腔体。然后关闭积分器饱和功能,使激光频率达到腔体的直流频率。然后启动慢速控制器,这将减轻激光器压电换能器 (PZT) 在0.1 Hz以下频率的控制负担,并确保激光器在室内/实验室条件下的较大变化范围内保持锁定。
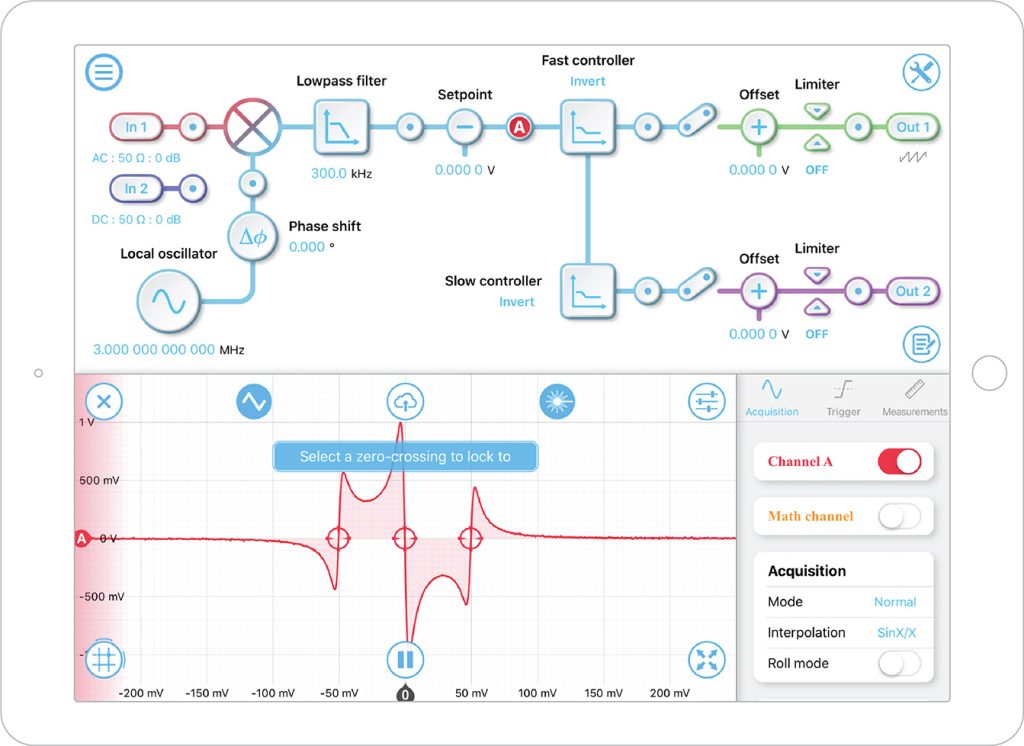
图3: 示例 PDH 误差信号图并点击以锁定过零点
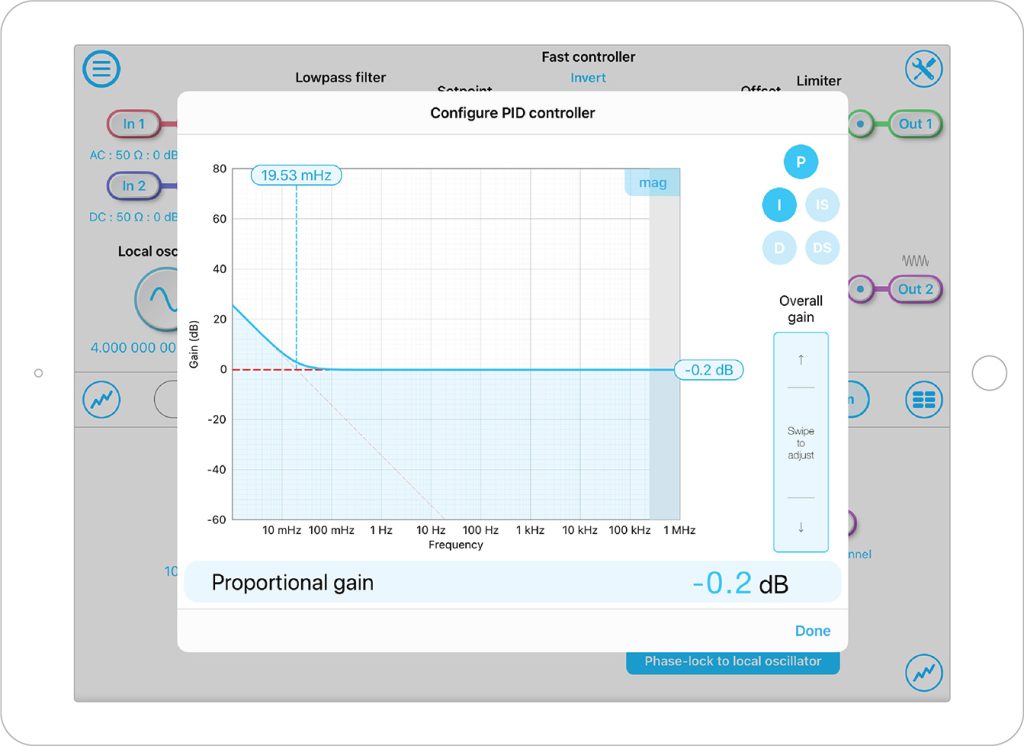
图4: 慢速(温度)PID 控制器的示例配置
结果与讨论
通过监测传输的光电探测器功率并使用 CCD 相机(也可以使用红外敏感观察卡)查看传输时的激光模式形状,验证了将激光锁定到 TEM00 模式。 这些监控信号的时域信号很容易在内置于示波器的 Moku:Lab Laser Lock Box 中实时查看。
通过使用内置示波器测量功能计算误差信号 RMS,对整体环路增益进行了基本优化。 增加增益以最小化误差信号的 RMS; 增益太大会引起振荡,增益太小意味着激光频率扰动仍未得到充分抑制。 可以通过频域优化进一步改进环路性能。 这可以通过使用求和前置放大器在 Moku:Lab 输出 1 和激光压电之间注入扫频正弦扰动并测量环路内对这种注入扰动的抑制来实现。 这种测量可以使用第二个 Moku:Lab 使用其频率响应分析仪仪器进行。 在这些高度优化的配置中,环路的单位增益频率应优化为 30-60 kHz(高于此频率对于激光器的压电响应通常太快)。
在一项测试中,使用一腔双激光器测试来验证控制回路性能。第二个激光器被锁定到第一个激光器锁上方一个自由光谱范围 (FSR) 的空腔,并使用第二个相同的 Moku:Lab 激光锁箱设置。通过锁定两个独立的频率,将两个激光器与相同的共腔噪声但独立的电子和 Moku 数字化噪声进行比较。这两个锁定激光器之间的残余频率变化与腔间隔件噪声、腔涂层的热噪声以及实验室环境中的常见振动无关。这种噪声仅由控制环路和传感器引起,测量方法是将来自两个激光路径的光组合到高速光电探测器中,与稳定的 GHz 函数发生器混合,然后使用第三台 Moku:Lab 仪器(相位计),跟踪频率偏差。莫库:实验室 相位表 通过生成相对频率噪声的ASD,已用于读出残余频率噪声。控制环路引起的残余噪声在0.1 Hz/环路频率下为10 Hz/√Hz。腔体激光锁的实际绝对性能最终将受到基频热涂层噪声在低频下的限制。
承认
我们要感谢 Andrew Wade、Kirk McKenzie 和澳大利亚国立大学向我们提供了他们实验的详细信息、Moku:Lab 的使用说明和反馈。 澳大利亚国立大学的实验得到了 ARC 引力波发现卓越中心的支持。
案例
[1] Drever, RWP, Hall, JL, Kowalski, FV, Hough, J., Ford, GM, Munley, AJ, & Ward, H. (1983)。 使用光学谐振器的激光相位和频率稳定。 应用物理 B, 31(2),97 105。
[2] Nickerson, M. Pound Drever Hall 激光锁频综述。 JILA、科罗拉多大学和 Nist.
[3] Lally, EM (2006)。 使用 Pound-Drever-Hall 稳定技术的 1550 nm 窄线宽激光器 (博士论文,弗吉尼亚理工大学)。