本次回顾和问答活动是对我们网络研讨会的补充, 频域中的数字反馈控制回路, 我们与 EE世界在线 8 年 2025 月 XNUMX 日。如果您无法现场参加, 现在注册 按需访问。
除了网络研讨会摘要之外,下面还涵盖了部分观众问题的详细解答。
网络研讨会回顾
本次网络研讨会探讨了反馈和控制系统等重要工具如何在研究和工业领域应用,以简化复杂系统并增强稳定性和响应能力。会议涵盖了频域控制环路理论的核心概念,包括传递函数、频率响应和稳定性分析,以及在参考跟踪和干扰抑制中评估系统行为的方法。数字 Moku 的现场演示 PID 控制器 强调了软件定义仪器如何实现快速迭代和高效的系统调整。
观众提问
Moku 是否接受数字接口作为反馈信号,如串行协议和正交信号?
建立 Moku:Pro 以及 Moku:Lab 由于缺乏数字 I/O 端口,所有输入信号必须先经过模拟前端,再由 ADC 进行数字化。数字化后,像 Moku PID 控制器这样的仪器就可以使用这些信号。然而,PID 控制器无法直接解析串行协议。在这种情况下,它可以与 Moku 一起使用。 逻辑分析仪/码型发生器,可以解码或合成串行数据流。对于正交信号,可以考虑使用 Moku 时间间隔与频率分析仪 测量两个通道之间的相位或时间延迟,也可以产生与测量时间间隔成比例的模拟输出。

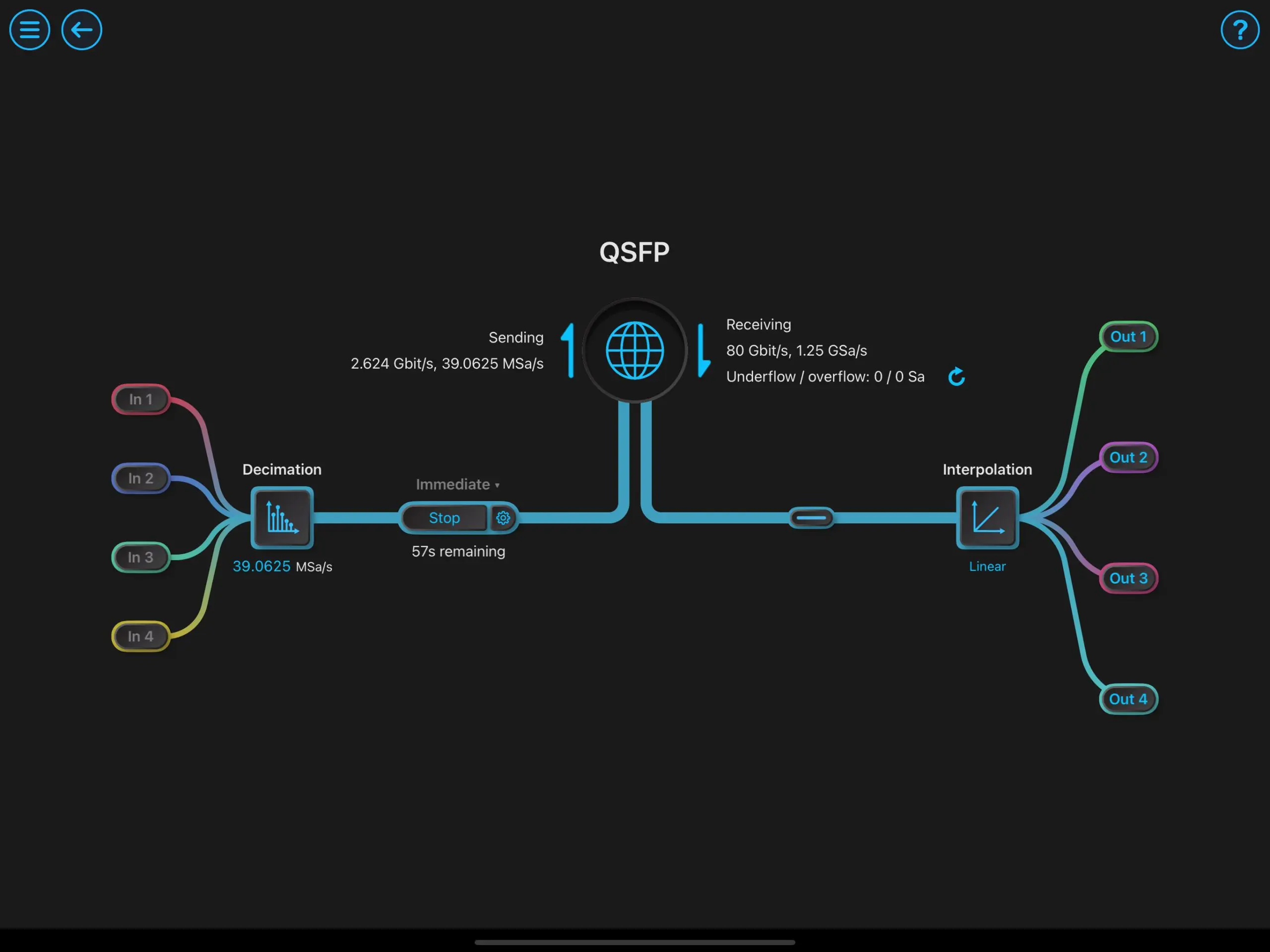
图 1. 在多仪器模式下,Moku:Go 数字 I/O 端口可以以与模拟端口相同的方式使用。
Moku:Go相比之下,它具有 16 位可配置数字 I/O,如图 1 所示。这些引脚可以任意设置为输入或输出,从而允许仪器直接访问数字信号。然而,同样的限制也适用:复杂协议的直接解码仍然必须由适当的仪器处理。
由于您的反馈系统是软件控制的,因此它必须基于数字时钟运行。您的控制环路的采样率或更新率是多少?由于奈奎斯特约束,您的环路带宽可能受到哪些限制?
是的,数字控制系统确实受到采样率约束的限制。在 Moku:Pro PID 控制器中,内部 DSP 的采样率为 78 MSa/s,由此得出约 38 MHz 的有效开环带宽。
在信号路径中包含 ADC 和 DAC 的闭环配置中,Moku:Pro 的实际反馈带宽指定为 ~150 kHz。该值主要取决于转换延迟和相位延迟,而非仅受奈奎斯特约束的影响。
在演示过程中,当你添加一个额外的积分器时,你并不担心稳定性问题,因为当相位接近-180°时,增益远高于XNUMX。为什么这不是问题?
确实,添加积分器会增加相位滞后,使系统更接近与不稳定性相关的-180°相移。然而,系统也以较大的增益裕度运行,这意味着系统在这些频率下的总增益仍然远高于XNUMX。
当开环传递函数接近复平面上表示的临界点 -1 时,即增益为 1 (0 dB) 且相位为 -180° 时,稳定性问题就会出现。在这种情况下,可能会出现正反馈,从而导致振荡或不稳定。在演示示例中,由于在相位接近 -1° 时增益仍然远大于 180,因此系统仍然远离该临界点。
更多问题?
在我们的知识库中获取常见问题解答
如果您对设备特性或仪器功能有疑问,请查看我们的 知识库 来查询您正在寻找的答案。 您还可以快速查看热门问题并按产品或主题来优化搜索。
加入我们的用户论坛来与我们保持联系
想要新的功能吗? 有技术支持提示要分享? 从客户案例到新功能公告等等, 用户论坛 是您的一站式门户,作为产品更新以及与 Liquid Instruments 和我们的全球用户社区建立联系。