本博客提供了使用单位阶跃响应法调整数字 PID 控制器的实用指南,利用实时反馈和示波器可视化进行有效调整。
当调整数字 PID控制器,您可以在增益图上以交互方式调整参数,并在嵌入式 示波器。这使得实验性地调整控制器比传统 反馈系统,并且需要用户进行更少的计算。有关频域控制的详细指南,请阅读我们的 应用笔记.
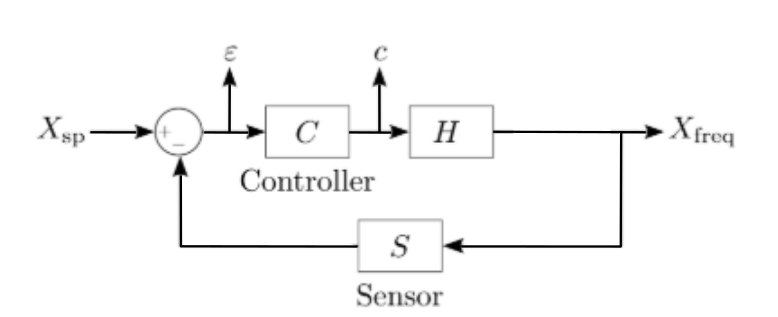
图 1:典型反馈控制系统框图
构建如图 1 所示的反馈控制回路时,使用框图方法可以大大简化分析。图 1 描述了一个闭环频率控制系统,其中 Xsp 表示设定点输入,C 表示控制器,H 表示受控系统,X频率 表示系统的输出频率。在我们的反馈回路中,S 表示用于测量系统输出的传感器。通过将此输出与我们所需的设定点进行比较,控制器可以补偿系统的变化。
期望设定点与系统输出之间的差异就是误差信号 ε。如果传感器输出与设定点匹配,误差信号将为零。如果输出大于期望设定点,误差将为负,导致控制器降低输出。
调整反馈控制系统的方法有很多种。在本例中,我们将概述如何开始通过实验调整数字 PID 控制器,首先从单位阶跃输入信号开始,查看系统单位阶跃响应,并在观察响应的同时调整 P、I 和 D 参数以实现所需结果。为了模拟被测设备,我们在 Moku:Pro 中配置 多仪器并行模式 (图2),在数字滤波器盒中使用100 Hz、二阶低通滤波器(图2)。 示波器的嵌入式波形发生器产生方波作为我们的输入阶跃信号(图 4)。
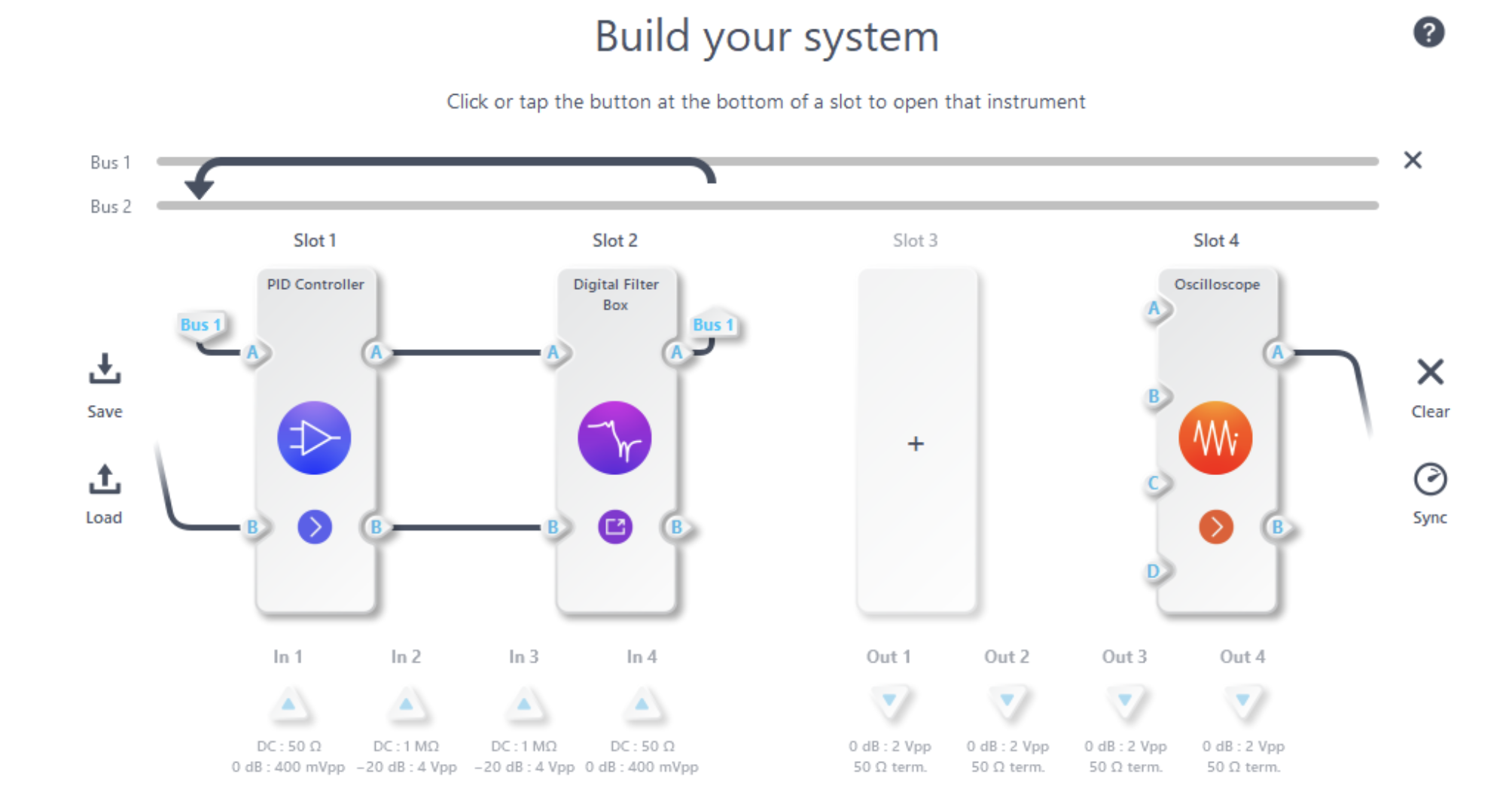
图 2:使用数字滤波盒模拟植物的多仪器模式配置
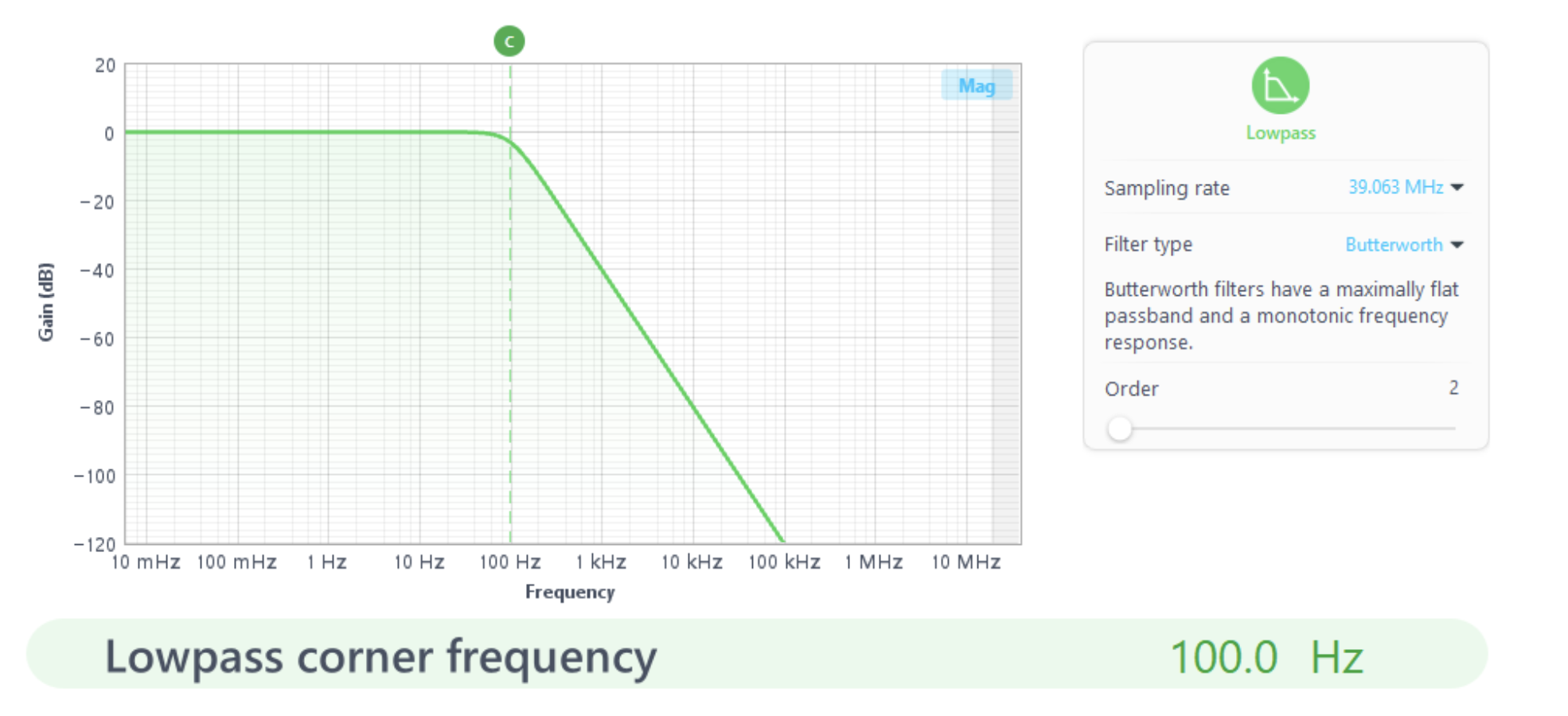
图 3:数字滤波器盒低通滤波器配置

图 4:使用嵌入式波形发生器生成阶跃信号
设置系统
- 将 Moku:Pro PID 控制器作为图 1 中的 C 控制器连接到您的系统。
- 确保输入信号(即实际传感器输出与所需设定点 Xsp 之间的差值)和输出控制信号(即图 1 中 C 的输出)配置正确。要了解有关 PID 控制器输入控制矩阵的更多信息,请阅读此 知识库文章. 将传感器反馈连接到 Moku:Pro. 将 Moku:Pro 的输出 1 连接到您的工厂或受控系统的调谐输入 H。此调谐输入可以用于压控振荡器 (VCO)、激光调制输入或电机控制器。
- 通过单击用于调整的控制器块和 Moku PID 控制器中控制器前后的探测点处的嵌入式示波器来打开增益图视图,如图 5 所示。
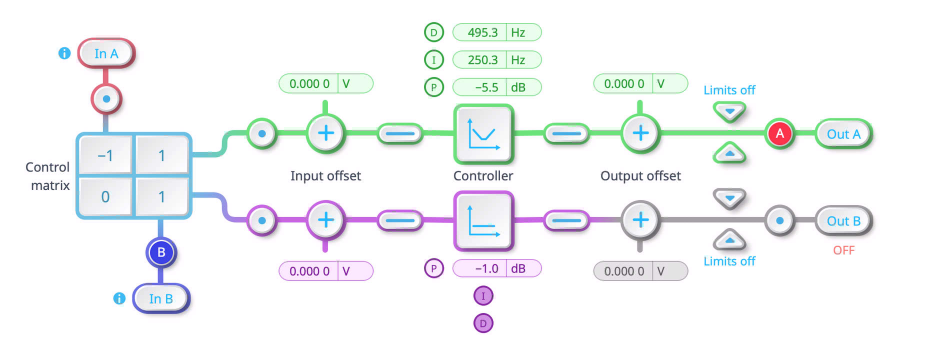
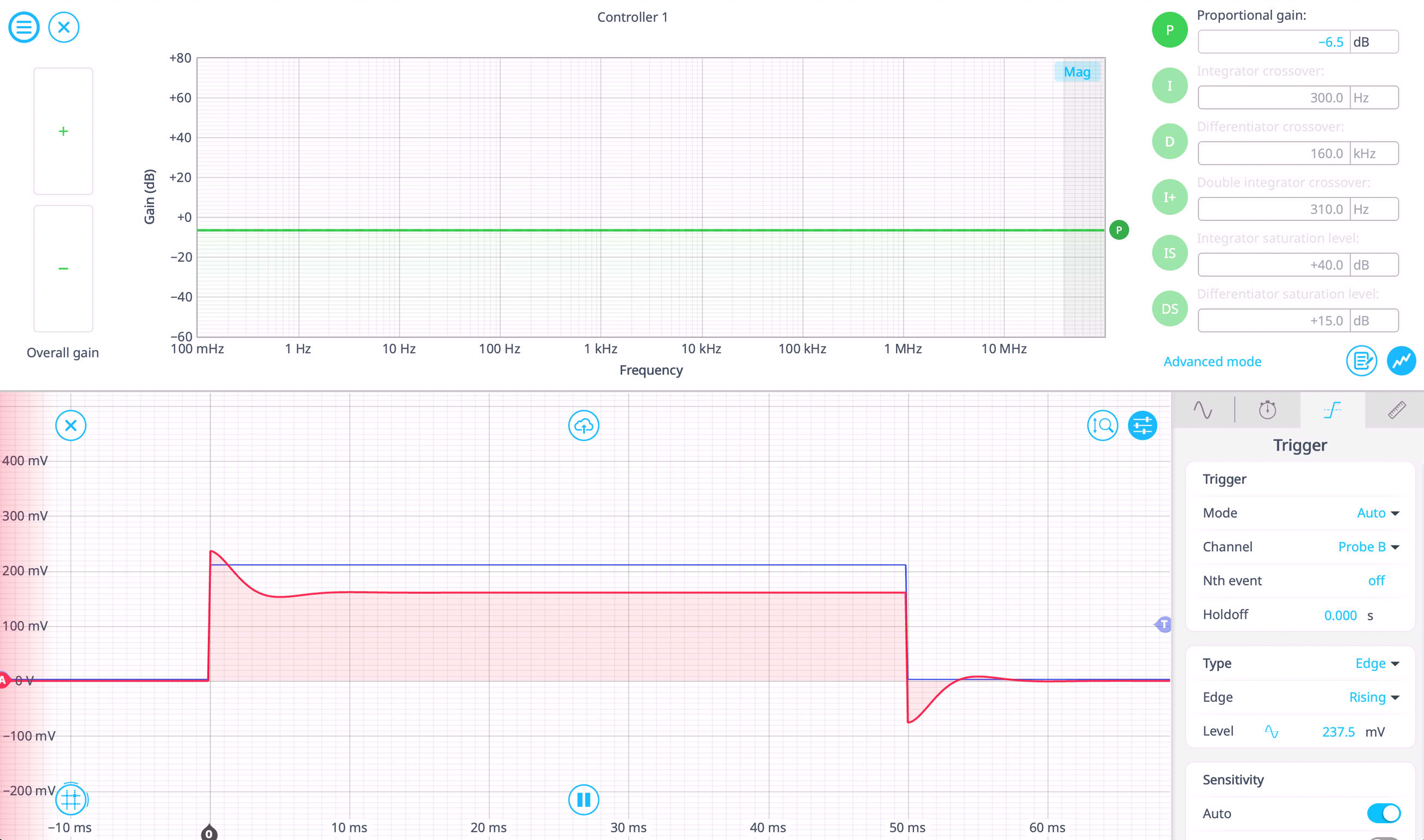
图 5:Moku PID 控制器的框图视图(顶部)。Moku PID 控制器的增益图和嵌入式示波器视图(底部)。
从比例(P)开始
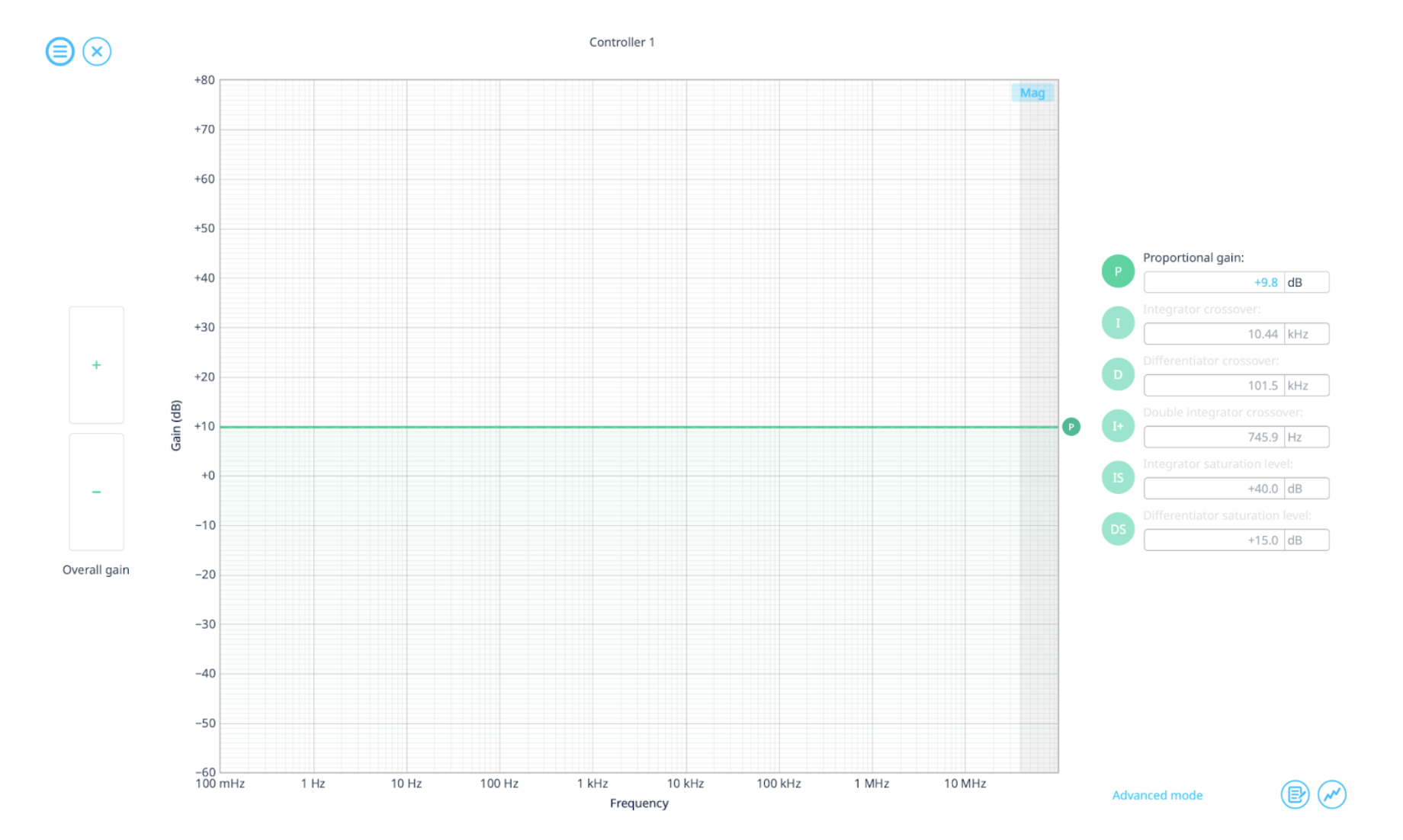
图 6:I 和 D 等于零,P 增加。
- 首先禁用 I 和 D。
- 通过在增益图上拖动 P 来增加 P,直到系统开始快速响应。
- 观察示波器输出——如果系统振荡太大,则稍微降低 P。
添加积分(I)以消除稳态误差
- 缓慢增加 I 以消除任何稳态误差,如图 7 所示。

图 7:减小 P,修改 I。
- 监测示波器是否有过冲——I 过大会导致过度振荡。在图 8 中,将 I 增加到 300 Hz 会导致明显的振荡。
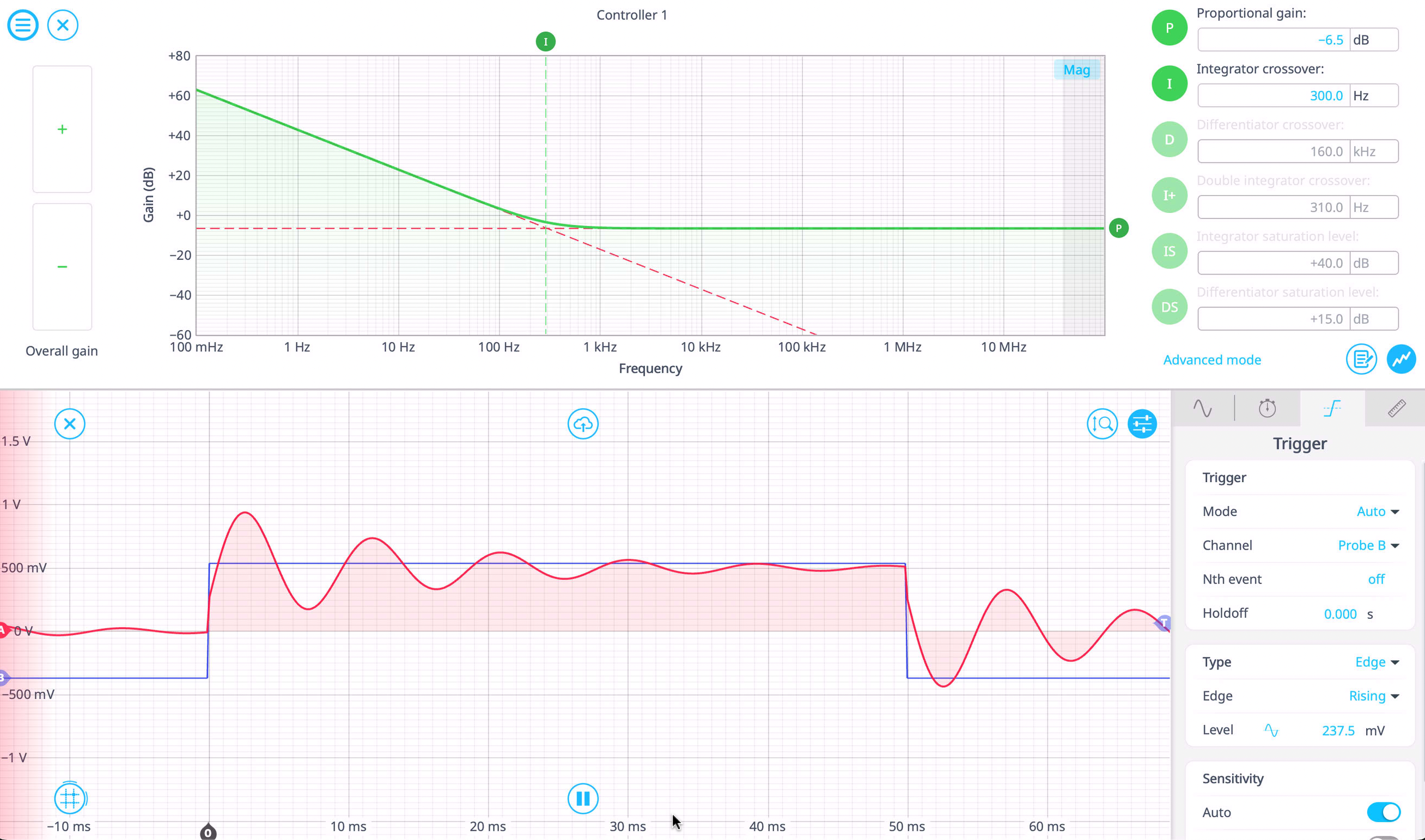
图 8:振荡随 I 的增加而增大。
- 如果振荡增加,请考虑稍微降低 P。
添加导数(D)以提高稳定性
- 逐渐增加 D 以减少过冲并抑制振荡,如图 9 所示。

图 9:P 和 I 设置,在 100 Hz 处添加 D。
- 请注意——过多的 D 可能会因放大高频信号而使系统产生噪声。您还可以启用微分器饱和项来限制高频增益。
- 在观察示波器的同时交互调整 P、I 和 D 以获得最佳性能。
要进一步微调响应,请使用小调整并观察示波器上的实时响应。使用示波器的内置测量功能,您还可以监控上升时间、过冲、下冲等,并将这些信息记录到文件中(如果需要)。这些示波器轨迹也可以导出为 .MAT 文件,以供 在 MATLAB 中进一步分析。如有必要,调整输出限制以保护外部组件、滤波器或采样率,从而获得更好的稳定性。要实现级联控制器,请使用 多仪器并行模式 on Moku:Pro.