



이 시리즈에서는 주파수 영역에서 발생하는 피드백 제어에 대한 간략한 소개를 통해 루프를 설계하고 디버깅하기 위한 실용적인 참고 자료를 제공합니다.
6.1 개요
PID 컨트롤러 다음을 포함한 많은 장치에 등장합니다. 모쿠 가족. Moku는 독립형을 제공합니다. PID 컨트롤러, 통합 PID 컨트롤러도 그 일부로 포함됩니다. 레이저 락 박스 및 락인 증폭기. 이 시리즈의 마지막 부분에서는 Moku PID 프레임워크의 두 가지 동등한 주파수 영역 모델을 제시하여 사용자가 외부 소프트웨어에서 제어 루프를 모델링할 수 있도록 합니다.
파트 1 전달 함수의 정의를 확립하고 정교한 시스템을 모델링하기 위한 제어 루프 블록 다이어그램을 구성할 수 있는 구성 요소를 제공합니다. 파트 2 피드백 제어 시스템을 사용하여 교란을 억제하거나 프로세스 설정점을 추적하는 방법을 보여줍니다. 노이즈가 많은 센서와 관련된 복잡성도 논의합니다. 개방 루프 시스템과 달리 피드백 제어를 받는 장치는 불안정해질 가능성이 있으며 성능과 견고성 사이에 긴장이 있습니다. 궁극적으로 신호 전파 지연은 가장 엄격한 한계를 부과할 수 있습니다. 이러한 문제는 파트 3. 주파수 영역에서 피드백 시스템의 대부분 매개변수는 개방 루프 전달 함수에 연결될 수 있습니다. 파트 4 이 중요한 양을 측정하는 방법을 설명하고 이를 형성하는 데 자주 사용되는 함수 목록을 제공합니다. 파트 5 액추에이터 포화를 피하는 한 가지 방법을 설명하고, 그렇게 하면서 여러 액추에이터의 처리에 유용한 아이디어를 소개합니다. 저희 시리즈는 6부에서 PID 컨트롤러에 대한 연구로 마무리됩니다. 이 공통 제어 아키텍처는 일반적으로 시간 영역 관점에서 고려됩니다. 저희는 보완적인 주파수 영역 표현을 설명합니다.
6.2 전달 함수
PID 컨트롤러의 출력은 비례, 적분, 이중 적분 및 미분과 같은 독립 경로의 가중 합으로 설명할 수 있습니다. 이는 다음과 같은 형태의 전달 함수 H(s)를 생성합니다.
\(P + 프랙{K_I}{s} + 프랙{K_{I+}}{s^2} + K_Ds\)
또는 포화 조건을 포함하거나,
\(H(s) = P + 프랙{K_I}{s} 프랙{s}{(s-p_{IS})} + 프랙{K_{I+}}{s^2} 프랙{s^2}{(s-p_{IS})^2} + K_Ds 프랙{-p_{DS}}{(s-p_{DS})}\)
\(= P + 프랙{K_I}{(s-p_{IS})} + 프랙{K_{I+}}{(s-p_{IS})^2} + K_Ds프랙{-p_{DS}}{(s-p_{DS})}\) (6.1)
주파수 응답은 다음 대입을 통해 이 표현식에서 얻을 수 있습니다. s = iω어디로 i 허수 단위이며 ω 각 주파수. 사용 가능한 기능의 하위 집합은 불필요한 용어를 제거하여 모델링할 수 있습니다.
표 6.1은 모델 매개변수가 계측기에 제공된 값과 어떻게 관련되어 있는지 설명합니다.
표 6.1: 모델 매개변수. Moku 계측 소프트웨어에서 구성된 매개변수는 표의 첫 번째 부분에 나열되어 있으며, 파생된 매개변수는 그 뒤에 나와 있습니다.
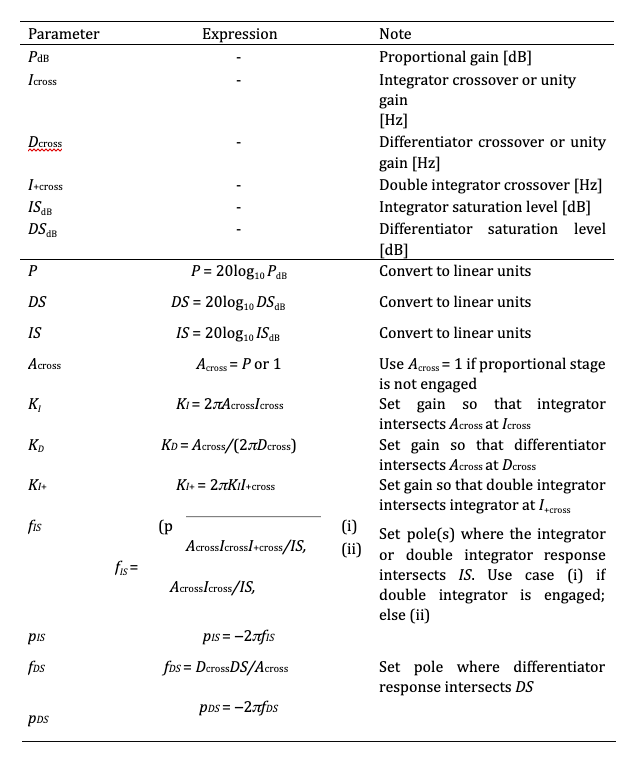
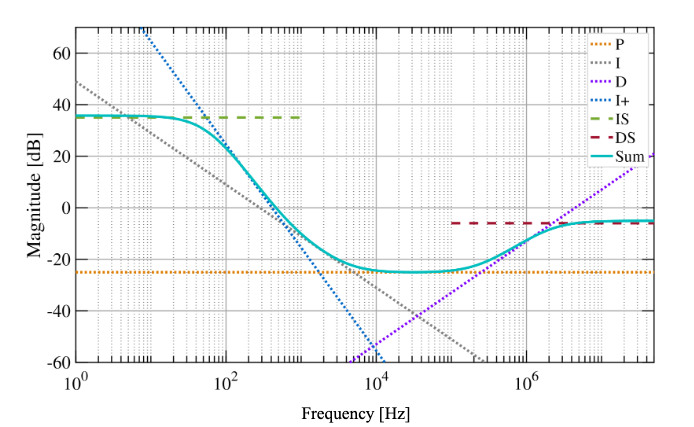
그림 6.1: 활성화된 모든 단계의 합계(점선)는 전체 컨트롤러 응답(실선)을 제공합니다. 적분기 및 미분기 포화 수준은 점선으로 표시됩니다. 사용자 정의 매개변수는 다양한 기여의 상대적 크기를 정의합니다.
그림 6.1은 전체 응답이 기여 경로의 합으로 주어지는 방식을 보여줍니다.
6.3 영점, 극점, 이득
또 다른 접근 방식은 응답을 0, 극점 및 전체 이득의 관점에서 설명하는 것입니다. 즉, 다음과 같은 형태입니다.
\(H(s) = K frac{(s-z_1)(s-z_2)ldots(s-z_N)}{(s-p_1)(s-p_2)ldots(s-p_N)}.\) (6.2)
이러한 설명은 방정식(6.1)의 확장 및 단순화를 통해 실현될 수 있습니다. 일반적인 경우 우리는 다음을 발견합니다.
\(H(s) = (P-K_Dp_{DS})분율{(s-z_1)(s-z_2)(s-z_3)}{(s-p_{IS})^2(s-p_{DS})},\) (6.3)
여기서 0은 방정식의 근에 의해 주어집니다.
\((P-K_Dp_{DS})s^3+\)
\((2K_Dp_{IS}p_{DS} + K_I – Pp_{DS} – 2Pp_{IS})s^2+ % s^2\)
\((-K_Dp_{IS}^2p_{DS} – K_Ip_{DS} – K_Ip_{IS} + K_{IP} + 2Pp_{DS}p_{IS} + Pp_{IS}^2)s+\)
\((K_Ip_{DS}p_{IS} – K_{IP}p_{DS} – Pp_{DS}p_{IS}^2)=0.\) (6.4)
분석적 방법은 다소 다루기 어렵기 때문에 이 방정식을 수치적으로 풉니다.
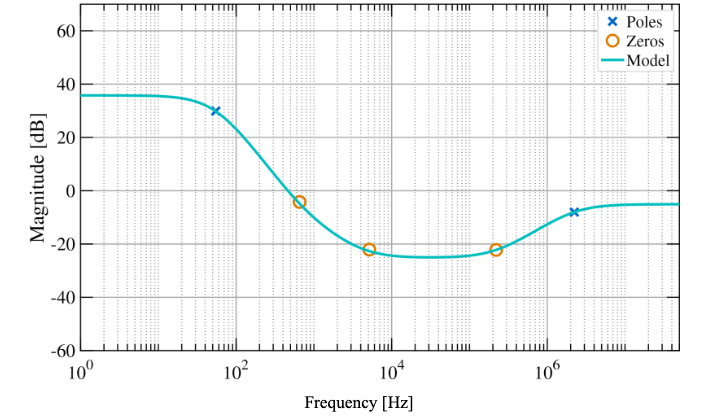
그림 6.2: 극점과 영점의 주파수를 표시한 제어기 응답. 50Hz 근처의 극점은 다중도가 2임을 유의하십시오.
그림 6.2는 그림 6.1에 나타난 응답이 합산된 경로가 아닌 극점과 영점으로 특징지어질 수 있는 방법을 보여줍니다.
6.4 측정 데이터와의 비교
그림 6.3은 우리 모델을 다음을 사용하여 얻은 측정 데이터와 비교합니다. 레이저 락 박스 의 Moku:Pro관심 주파수 범위 전체에서 허용 가능한 일치가 관찰되었습니다.
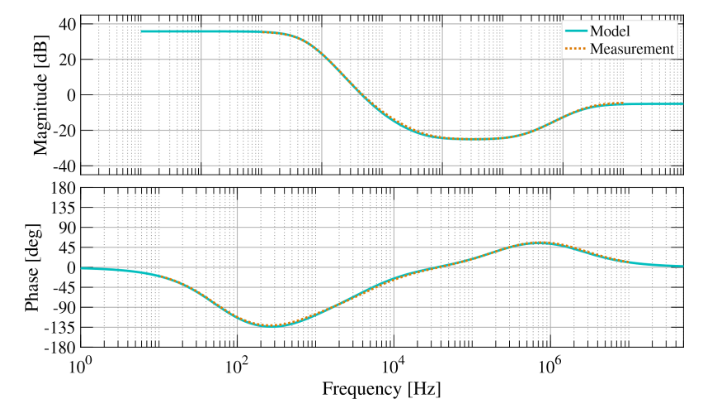
그림 6.3: 모델 데이터와 측정 데이터 비교. 일치도는 최악의 경우 1 dB/3◦ 이내(그림 참조)이며, 일반적으로는 XNUMX배 더 좋습니다.
6.5 더 정확한 모델
숫자적인 이유로, PID 컨트롤러 위에서 설명한 바와 같이 순수한 용어의 합계로 구현되지 않고 (6.1 참조) 다음 형식의 곱으로 구현됩니다.P + I + D) × (P + I)어디로 피, 나 및 D 비례, 적분 및 미분 항에 해당합니다. 이중 적분기를 생성하는 것 외에도 나 × 나 용어 우리는 또한 우리 모델에 추가해야 하는 두 개의 다른 교차 용어를 실현합니다.
\(H^{프라임}(s) = 프랙{1}{P}x왼쪽(P + 프랙{K_I}{(s-p_{IS})} + K_Ds프랙{-p_{DS}}{(s-p_{DS})}오른쪽)x왼쪽(P + 프랙{P}{K_I}프랙{K_{I+}}{(s-p_{IS})}오른쪽)\)
\(=H(s) + 프랙{K_{I+}/K_I}{(s-p_{IS})}+K_Ds프랙{-p_{ds}}{(s-p_{DS})}프랙{K_{I+}/K_I}{(s-p_{IS})}.\)
우리의 극-영점-이득 모델에 따르면, 영점만 수정하면 됩니다. 우리는 (6.4)의 LHS에 다음 항을 추가합니다.
\((PK_{I+}/K_I – K_Dp_{DS}K_{I+}/K_I)s^2+\ % s^2\)
\((K_Dp_{DS}p_IK_{I+}/K_I – Pp_{DS}K_{I+}/K_I – Pp_IK_{I+}/K_I)s+\)
\(( Pp_{DS}p_{I}K_{I+}/K_I).\)
추가 조건은 다음 경우에만 활성화됩니다. I+ 이중 적분기 단계가 활성화되어 있으며 일반적인 모델에 필요한 정확도 수준에서는 대체로 중요하지 않습니다.
6.6 요약 및 결론
이 시리즈의 이번 회에서는 주파수 영역 모델을 제시했습니다. PID 컨트롤러 발견 된 모쿠 악기. 일반적으로 시간 영역 동작을 통해 설명되는 이 예는 두 영역의 보완성을 잘 강조합니다. 이 모델은 부동 소수점 소프트웨어(Matlab, Python, 등)을 사용하여 사용자가 실험을 설계하고 분석하는 데 도움을 줍니다. 이 모델은 측정된 데이터와 잘 일치합니다. 그러나 가장 큰 정확도가 필요한 경우, 당사의 진동수 응답 분석기.
이 시리즈 전체에서 우리는 주파수 영역 제어의 기본 토대를 제공했습니다. 전달 함수의 정의에서 시작하여 블록 다이어그램을 사용하여 피드백 제어 루프를 구성하고 신호가 정상 상태에서 루프 주변으로 전파되는 방식을 보여주었습니다. 이 작업은 교란 제거, 설정점 추적 및 안정성에 대한 아이디어로 이어졌습니다. 우리는 개방 루프 전달 함수를 형성할 때 이러한 개념 간의 상호 작용에 대해 간략하게 논의하면서 마무리했습니다. 이 작업 전반에 걸쳐 우리는 특히 안정성과 관련된 문제에서 수학적 세부 사항을 최소한으로 유지하려고 노력했습니다. 더 자세한 내용과 엄격성을 추구하는 독자는 아래에 인용된 문헌에서 많은 도움을 받을 수 있습니다.
참고자료
A. Abramovici와 J. Chapsky, Feedback control systems. 도르드레흐트, 네덜란드: Springer, 2000년 XNUMX월.
K. 오가타, 현대제어공학, 5판. Upper Saddle River, NJ: Pearson, 2009년 XNUMX월.

