



이 시리즈에서는 주파수 영역에서 발생하는 피드백 제어에 대한 간략한 소개를 통해 루프를 설계하고 디버깅하기 위한 실용적인 참고 자료를 제공합니다.
5.1 개요
루프가 닫히고 필요한 성능이 실현되어 짧은 시간 후에 제어가 손실되는 경우가 종종 발생합니다. 이러한 상황에서 일반적인 원인은 액추에이터 포화입니다. 이러한 경우 액추에이터는 교란의 가장 높은 주파수 요소를 완화할 만큼 '빠르지만' 가장 낮은 주파수 구성 요소를 처리할 수 있는 필수적인 절대 범위가 없습니다.
예를 들어, 레이저를 캐비티에 잠그는 경우 레이저의 piezoelectric motor (PZT)는 처음에는 레이저를 공진 상태로 유지할 수 있습니다. 그러나 환경적 열 효과로 인해 캐비티의 길이가 시간이 지남에 따라 증가합니다(예:). 결과적으로 PZT 제어 신호의 'DC' 구성 요소는 전자 장치 또는 PZT 자체가 '레일'되고 잠금이 해제될 때까지 단조롭게 증가합니다. 주파수 영역 제어에 대한 이 시리즈의 이 부분에서는 두 번째 액추에이터를 추가하여 이 문제를 해결하는 방법을 고려합니다.
파트 1 전달 함수의 정의를 확립하고 정교한 시스템을 모델링하기 위한 제어 루프 블록 다이어그램을 구성할 수 있는 구성 요소를 제공합니다. 파트 2 피드백 제어 시스템을 사용하여 교란을 억제하거나 프로세스 설정점을 추적하는 방법을 보여줍니다. 노이즈가 많은 센서와 관련된 복잡성도 논의합니다. 개방 루프 시스템과 달리 피드백 제어를 받는 장치는 불안정해질 가능성이 있으며 성능과 견고성 사이에 긴장이 있습니다. 궁극적으로 신호 전파 지연은 가장 엄격한 한계를 부과할 수 있습니다. 이러한 문제는 파트 3. 주파수 영역에서 피드백 시스템의 대부분 매개변수는 개방 루프 전달 함수에 연결될 수 있습니다. 파트 4 우리는 이 중요한 양을 측정하는 방법을 설명하고 그것을 형성하는 데 자주 사용되는 함수 목록을 제공합니다. 여기서, 5부에서는 액추에이터 포화를 피하는 한 가지 방법을 설명하고, 그렇게 하면서 여러 액추에이터의 처리에 유용한 아이디어를 소개합니다. 우리 시리즈는 파트 6 연구와 함께 PID 컨트롤러. 이 공통 제어 아키텍처는 일반적으로 시간 영역 관점에서 고려됩니다. 우리는 보완적인 주파수 영역 표현을 설명합니다.
5.2 추가 액추에이터
이 시나리오에서 명백한 옵션은 포화 액추에이터를 더 넓은 범위를 제공하는 액추에이터로 교체하는 것입니다. 일반적으로 이 전략은 범위를 늘리면 속도가 비례적으로 감소하기 때문에 실패합니다. 그럼에도 불구하고 이러한 지식은 또 다른 해결책을 제시합니다. 우리는 더 넓은 범위를 제공하는 두 번째 액추에이터로 시스템을 보강할 수 있으며, 이는 느리지만 가장 낮은 주파수에서 교란을 상쇄할 수 있습니다.
이 접근 방식은 그림에 설명되어 있습니다. 5.1. 가장 위의 다이어그램은 다음을 나타냅니다. 전달 함수 \(H_F\)를 갖는 빠른 액추에이터만 있는 초기 루프, 포함되어 있습니다. 빠른 컨트롤러와 시스템 센서에는 전달 함수가 있습니다. F 및 S각각. 이 루프는 OLTF \(SFH_F\)를 사용하면 안정적입니다..
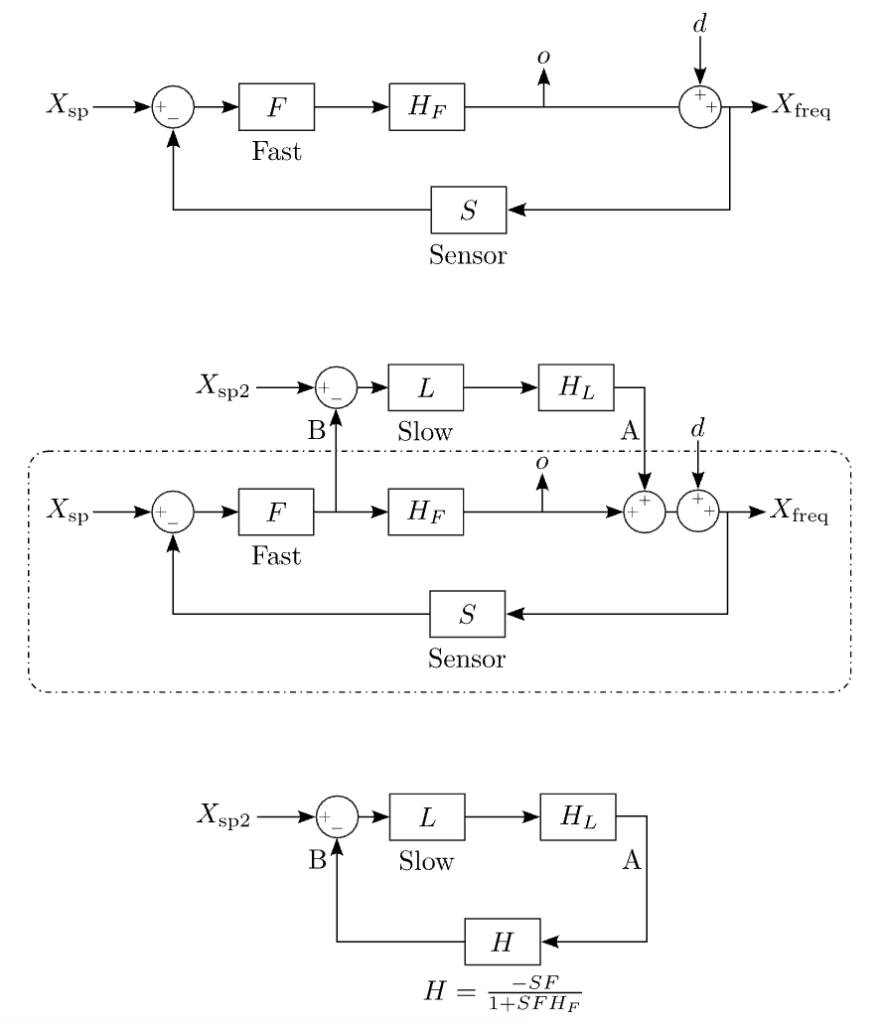
그림 5.1: 위: 초기 '빠른 루프'. 가운데: 포화를 피하기 위해 느린 루프로 증강된 빠른 루프. 아래: 빠른 루프를 식물로 간주한 동등한 루프.
중간 다이어그램은 느린 액추에이터(전달 함수 \(H_L\))와 느린 컨트롤러(전달 함수)를 추가한 동일한 시스템을 보여줍니다. L). 이 새로운 경로는 빠른 액추에이터의 제어 신호를 입력으로 사용합니다. 우리의 목표는 포화를 피하기 위해 이 신호를 줄이는 것입니다.
5.3 관점의 변화
우리가 추가한 새로운 경로의 안정성과 성능을 결정하기 위해서는 우리의 관점을 바꿔야 합니다. 빠른 루프 자체가 안정적이므로 우리는 그것을 다음과 같이 생각합니다. 식물 새로운 길을 위하여.
위에서 설명한 기술을 사용하여 우리는 지점 간의 전달 함수를 계산합니다. A 및 B 그리고 그림의 가장 아래 다이어그램에서 보여지는 것처럼 빠른 시스템을 단일 블록으로 축약합니다. 5.1. 해당 전달 함수는 다음과 같습니다.
\(H = 분수{-SF}{1+SFH_F}\)
그리고 우리의 새로운 '느린' 루프의 OLTF는 다음과 같습니다.
\(G = 분수{LH_L}{H_F}분수{-SFH_F}{1+SFH_F}\).
느린 루프는 필연적으로 초기 빠른 루프에 비해 낮은 UGF를 갖습니다. 빠른 루프의 UGF보다 낮은 값 \(-SFH_F/(1+SFH_F) = -1\). 따라서 느린 루프에 대한 관심 주파수에서,
\(G 심 -분수{LH_L}{H_F}\),
이 표현식은 느린 루프의 성능과 안정성을 정상적으로 결정하는 데 사용할 수 있지만 다음과 같은 단서가 있습니다. L 일반적으로 음의 피드백 루프의 위상을 수용하기 위해 음의 이득이 필요합니다. H.
5.4 채도 감소
느린 루프의 초기 목표는 빠른 액추에이터에 가해지는 제어 부담을 줄이는 것이었습니다. 이를 염두에 두고 출력을 살펴보겠습니다. o 주파수 교란에 대한 응답으로 빠른 액추에이터의 d (그림 참조 5.1).
원래의 빠른 경로만 단독으로 작동하면 다음을 알 수 있습니다.
\(o = frac{-SFH_F}{1+SFH_F}d 시뮬레이션 – d\),
대체로, 고속 루프 대역폭 내에서 고속 액추에이터는 교란의 역을 생성하여 출력이 교란되지 않도록 합니다.
느린 경로를 추가하면 다음과 같습니다.
\(o = 분수{-SFH_F}{1+SFH_F-SFLH_L}d 시뮬레이션 – 분수{d}{G}\),
여기서 근사값은 느린 루프의 대역폭 내에서 유효합니다. 따라서 느린 루프가 활성화된 주파수에서 빠른 경로 출력은 다음과 같이 감소합니다. G, 느린 루프의 이득. 이 감소된 출력이 빠른 액추에이터의 유용한 범위 내에 있으면 포화가 방지되고 긴 시간 척도에서 폐쇄 루프 작동이 가능해집니다.
모쿠 레이저 락 박스 위에 설명된 아키텍처를 사용하여 빠르고 느린 경로를 구현하여 사용자가 액추에이터 불포화 기술을 쉽게 배포할 수 있도록 합니다(그림 참조). 5.2).
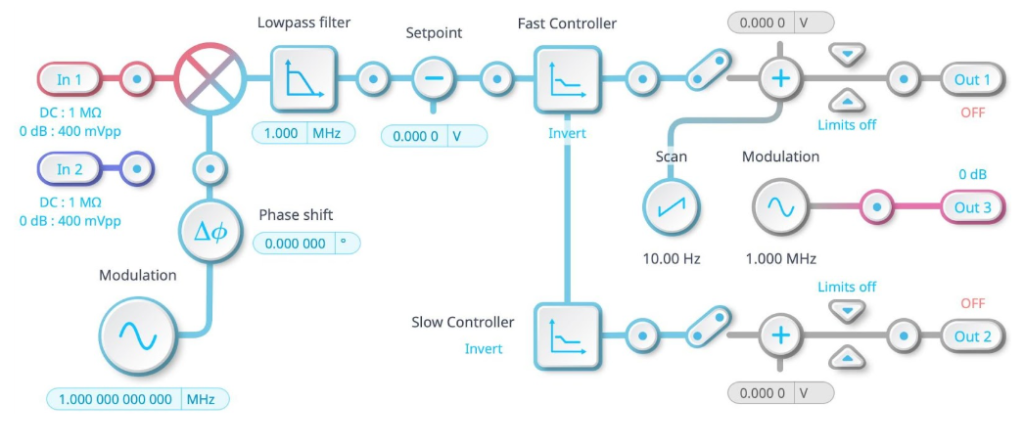
그림 5.2: 모쿠 레이저 락 박스 빠르고 느린 피드백 경로를 포함합니다. 빠른 컨트롤러의 출력은 느린 컨트롤러의 입력으로 라우팅됩니다. 이 아키텍처는 빠른 경로의 포화를 피할 수 있습니다.
5.5 제품 개요
위에서 우리는 서로 다른 주파수 대역에서 유용한 성능을 제공하는 두 개의 액추에이터의 조합이 액추에이터 포화 문제를 완화할 수 있는 방법을 보여주었습니다. 핵심 아이디어는 이전 부분에서 소개한 수학적 처리가 유연하다는 것입니다. 우리는 관점을 변경하고 전체 피드백 루프를 더 간단한 제어 시스템 다이어그램의 또 다른 블록으로 간주할 수 있습니다. 이 개념은 더 빠른 액추에이터를 추가하여 대역폭을 늘리려는 상황이나 우리가 조사한 계단식 아키텍처와 달리 여러 액추에이터가 병렬로 작동하는 상황에 적용할 수 있습니다. 새롭고 더 간단한 다이어그램을 통해 기존 도구로 복합 구성의 안정성을 쉽게 조사할 수도 있었습니다.

