



イントロダクション
前回議論したように 制御理論の応用ノート 一連のフィードバックシステムの設計と評価において、周波数領域解析は特にその安定性と全体的なノイズ除去性能を評価する上で重要な役割を果たします。これまでのノートではラプラス領域における理論的な原理に焦点を当てていましたが、このアプリケーションノートでは、実世界の例を用いてこれらの概念の実際的な実装に焦点を当てます。 Moku:Pro 電圧制御発振器(VCO)は、印加された制御電圧に応じて出力周波数が変化する電子発振器であり、信号生成や通信システムなどのアプリケーションで正確な周波数調整と変調を可能にします。
A フェーズロックループ (PLL) 出力信号の位相と周波数をリファレンス入力に合わせるフィードバックシステムです。位相検出器によって検出されたリファレンス信号とフィードバック信号間の位相差に基づいて、VCO出力周波数を連続的に調整することでこれを実現します。PLLは、安定した低ジッタ信号を生成し、変化するリファレンス周波数を正確に追跡できるため、通信システム、信号合成、クロックリカバリなどで広く使用されています。また、デッドタイムや位相ラップのない高精度な位相および周波数測定で知られるMoku Phasemeterの中核を成しています。
このアプリケーションノートでは、Mokuを使用した位相同期ループ(PLL)の構築について説明します。 ロックインアンプ、および開ループ伝達関数(OLTF)の測定と最適化を行います。このプロセスは、経験的な調整によって決定された初期コントローラ構成から始まります。OLTFはまずモデル化され、次に実験測定によって検証され、位相余裕やゲイン余裕などの主要な安定性指標が評価されます。これらの結果は、十分な安定余裕を維持しながら低周波ゲインを増加させることを目的とした最適化プロセスに反映されます。最後に、初期コントローラと最適化されたコントローラの両方からの周波数ノイズ測定値を比較し、フィードバックループ性能の改善を評価します。
実験設定
VCOを安定化するには周波数基準が必要です。これは通常、ルビジウム同期クロックなどの高精度な信号源によって提供されます。この実験では、Moku Proの高精度内蔵波形発生器によって基準が供給されます。この波形発生器は、ロックインアンプモジュール内で局部発振器として機能します。
Mokuプラットフォームは、VCOのフィードバック制御に使用される位相差(エラー信号とも呼ばれます)を抽出するための2つの主要な方法を提供します。1つ目の方法は、位相計を用いてVCO出力の周波数と位相を直接追跡する方法です。このアプリケーションで採用されている2つ目の方法は、ロックインアンプを用いてVCO信号を局部発振器で復調し、エラー信号を生成します。このアプローチは、構造のシンプルさと、内蔵の比例・積分・微分(PID)コントローラの利便性から採用されています。PIDコントローラは復調出力から直接VCO制御信号を生成します。
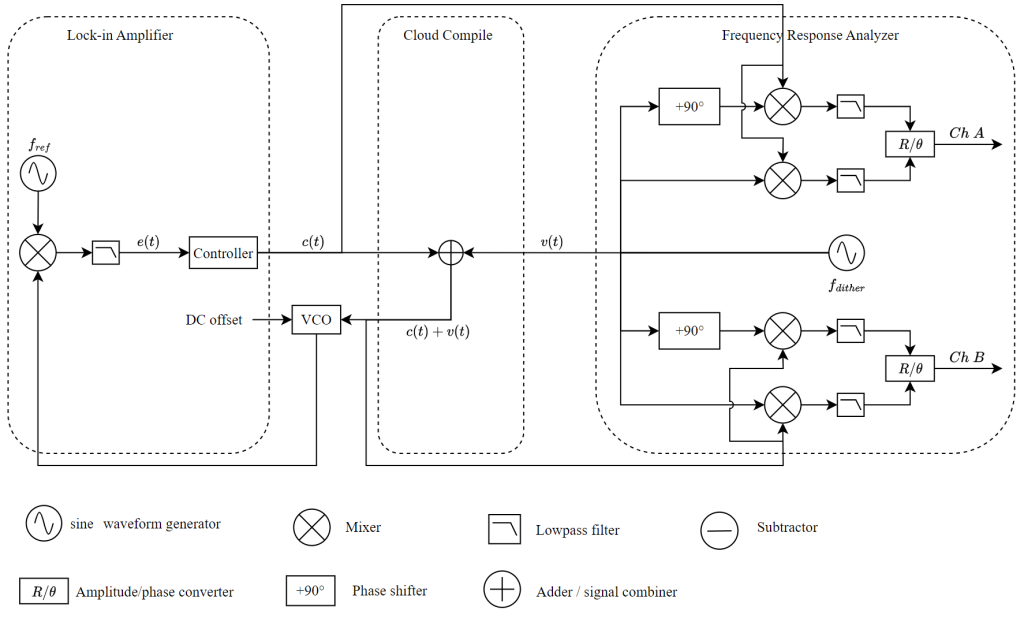
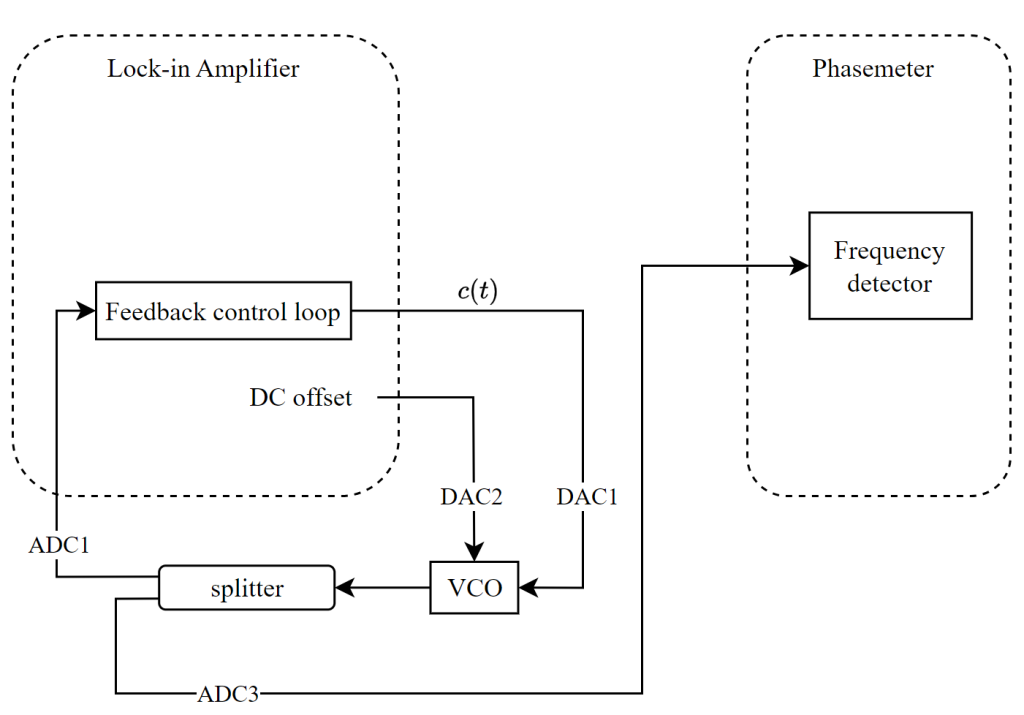
ロックインアンプに基づくPLLのブロック図を図1に示します。PLLは、基準正弦波発生器 \(f_{ref}\)(局部発振器)、復調用のミキサー、周波数和成分を除去して誤差信号 \(e(t)\) を生成するローパスフィルタ、そして周波数安定性を維持するためにVCOのチューニングポートに印加されるフィードバック制御信号 \(c(t)\) を生成するコントローラで構成されています。さらに、VCOに電源を供給するためにDCオフセットが供給されます。
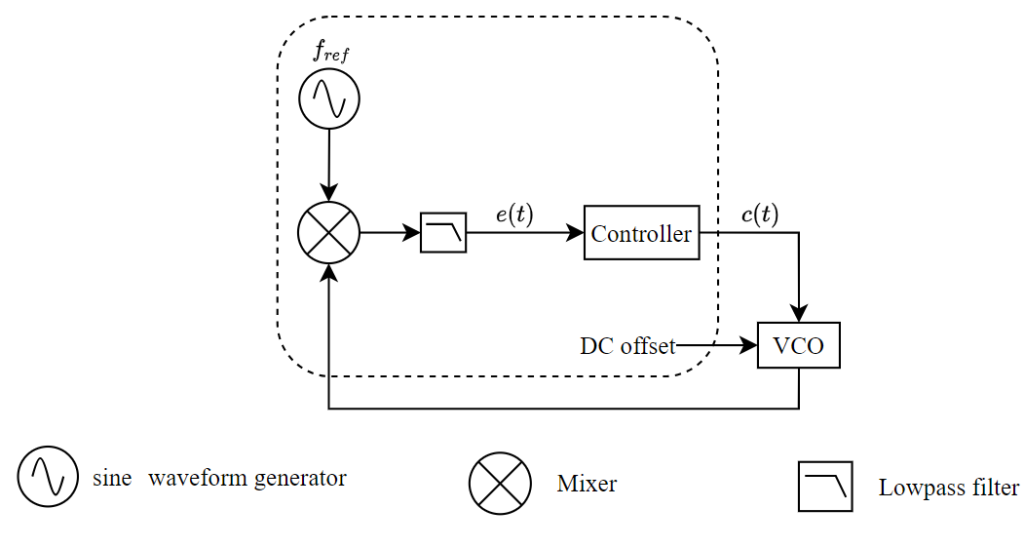
位相検出器
明瞭性と簡潔性のため、このアプリケーションノートでは、ロック状態におけるシステムの解析に焦点を当てています。この状態では、図1に示す誤差信号\(e(t)\)は、基準信号とVCO出力間の残留位相差を表します。この位相差は、2つの信号間の時間積分された周波数偏差から生じます。位相誤差をゼロまたはゼロ付近に維持することで、システムはVCO出力周波数が基準にロックされた状態を維持します。誤差信号\(e(t)\)は、数学的に次のように表されます。
\(e(t) = A \sin{\left( \int f_{VCO}(t)dt \right)} \times \sin{ \left( \int f_{ref}dt \right) } = \frac{A}{2} \cos{\left( \int \left[f_{ref} – f_{VCO}(t) \right] dt \right)} + \frac{A}{2} \cos{\left( \int \left[f_{ref} + f_{VCO}(t) \right] dt \right)}\).
この構成におけるVCOの公称周波数は62MHzですが、ローパスフィルタのカットオフ周波数は12.3MHzです(後述)。その結果、ローパスフィルタによって加算周波数成分が除去され、減算周波数成分のみが残ります。したがって、誤差信号は次のように表すことができます。
\(e(t) = \frac{A}{2} \cos{\left( \int \left[f_{ref} – f_{VCO}(t) \right] dt \right)} = \frac{A}{2} \sin{\left( \int \left[f_{ref} – f_{VCO}(t) \right] dt + 90^{\Large\circ} \right)}\)
ロック状態(\(\phi(t) \approx -90^{\Large\circ}\))では、誤差信号\(e(t)\)は主に残留ノイズの影響でゼロ付近でわずかに変動する。テイラー展開を用いると、正弦波は次のように表される。
\(\sin{x} = x-\frac{x^3}{3!} + \frac{x^5}{5!}-\frac{x^7}{7!} + …\)
ロック状態において\(x\)がゼロ付近でわずかに振動する場合、高次成分が無視できるため、正弦波はこの時点で良好な直線性を示します。これにより、\(sin{x} \approx x\)という近似が可能になります。したがって、\(e(t)\)の振幅は、局部発振器とVCO出力の間に一定の90°位相オフセットが存在するにもかかわらず、位相誤差を直接的に示します。
さらに、位相検出器のゲインは振幅に依存し、VCO信号の振幅に応じて変化します。制御システムの性能を評価する際には、この依存性を考慮する必要があります。その結果、誤差信号は次の式で近似できます。
\(e(t) \approx \frac{A}{2} \times \left( \phi(t) + 90^{\Large\circ} \right) \)
ここで、\(A\) は VCO 信号の振幅を表し、\(\phi(t) \) は瞬間的な位相偏差を表します。
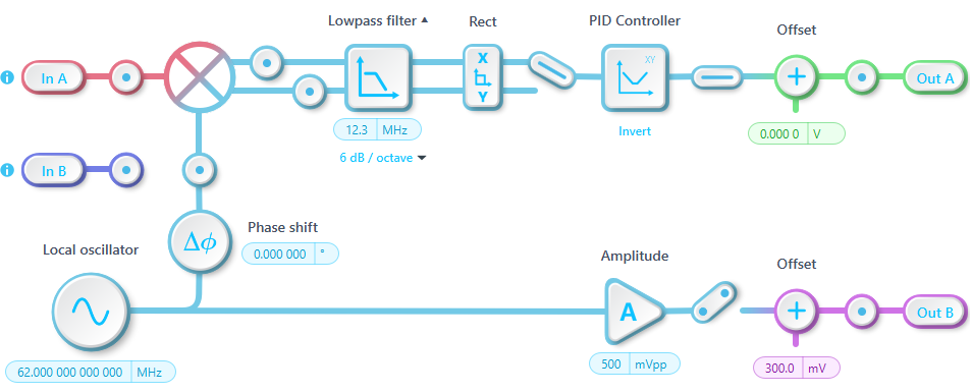
ロックインアンプの構成
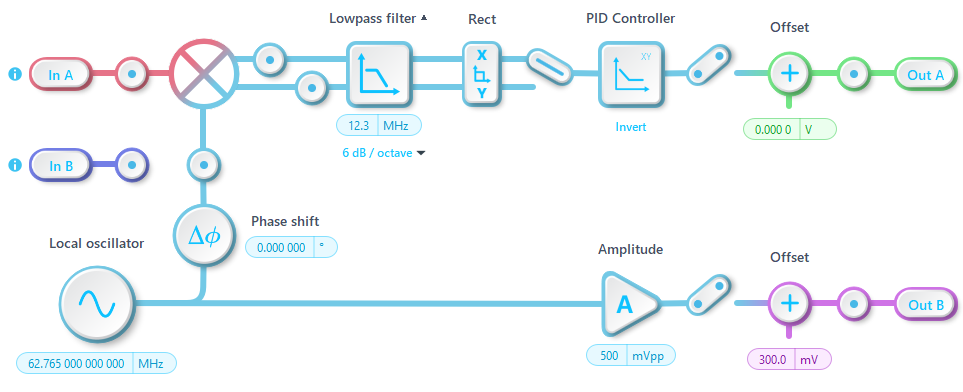
図1に示すPLLブロック図に従って、ロックインアンプの構成を図2に示します。VCO出力信号は、 インA、局部発振器は公称VCO周波数62MHzに設定されます。ローパスフィルタのカットオフ周波数は最大値12.3MHzに設定されます。この設定により、周波数和成分が効果的に抑制され、フィードバックループ内のフィルタによって生じる位相遅延が低減されるため、制御帯域幅が最大化されます。VCO周波数を調整するための制御信号は、 アウトA, アウトB VCO に電力を供給するために安定した 300 mV の DC 電圧を供給します。
特に、誤差信号\(e(t)\)は X チャンネルは、同相成分を誤差信号として用いる。そのため、ロックされたVCO出力は局部発振器に対して90°の位相差を示す。この位相オフセットは、誤差信号を Y チャンネルでは、代わりに直交成分を使用します。しかし、このアプリケーションノートの目的上、位相オフセットは許容範囲内であるため、PLLは引き続き直交成分を使用します。 X チャネル出力をエラー信号として出力します。
PIコントローラを使用した初期ロック
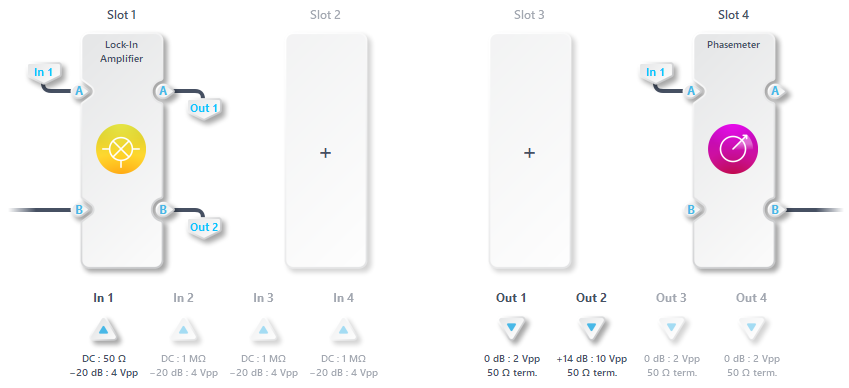
実験的なマルチインストゥルメントモードのセットアップを図3に示します。ここでは、スロット4に割り当てられた位相計がVCO周波数を継続的に監視しています。この測定によりVCOの初期周波数を正確に推定できるため、ロックインアンプ内の局部発振器周波数を適切に設定できます。この方法は一般に「アシスト周波数取得」と呼ばれます。また、Mokuスペクトラムアナライザを使用してスペクトルピークを検出することで、VCO出力周波数を特定することもできます。
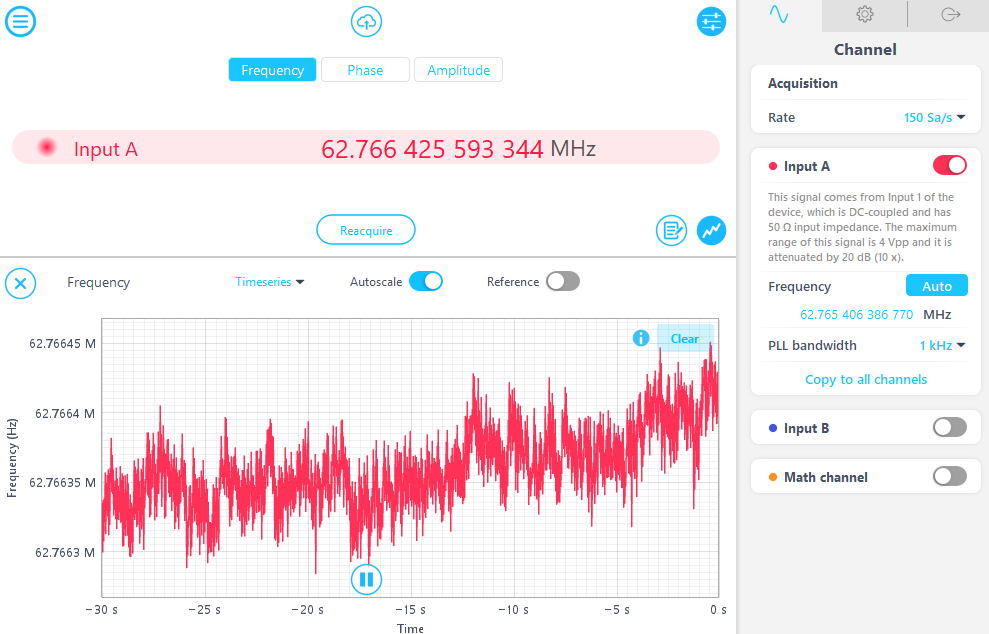
フリーランニングVCO周波数は、 位相計周波数設定は自動モードです。自動的に取得される初期周波数は62.7654 MHzです。ロックインアンプの内部基準周波数は、VCOの初期周波数と一致するように調整され、信頼性の高い初期ロックを実現します。この測定結果に基づき、図5に示すように、局部発振器は62.765 MHzに設定されます。
初期ロックでは、フィードバックループを機能させるために、大まかな見積もりと経験に基づいて比例積分(PI)コントローラが構成されます。この段階では、PIコントローラは最適化されていません。特に、ループには2つの純粋な積分器(1つはPIコントローラ自体から、もう1つはVCOの周波数と位相の関係から得られる)が含まれているためです。この構成により、ループ内で累積的に180度の位相シフトが生じ、システムが閉ループ不安定性に陥りやすくなります。
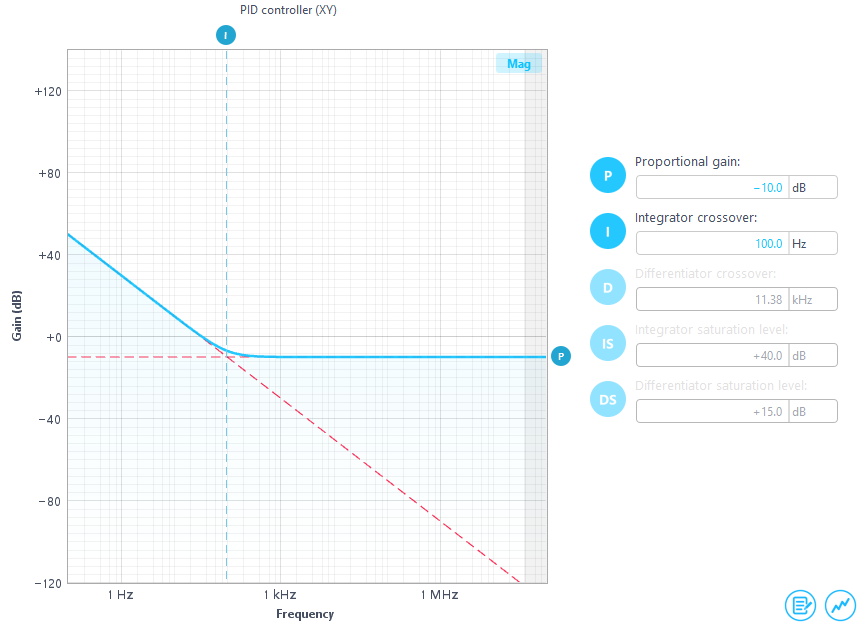
PIコントローラのパラメータを図6に示します。比例ゲインは-10dBに設定され、積分器のクロスオーバー周波数は100Hzに設定されています。その結果、コントローラは限られた帯域幅で動作します。位相偏差への応答は遅く、オープンループゲインも低く、VCO周波数ノイズの抑制効果も限定的です。
PIコントローラを作動させた後、位相計で測定された周波数を図7に示します。ロック前は、信号は一定の周波数オフセットと大きな周波数変動を示しています。PIコントローラが作動すると、周波数は62.765MHzにロックし、選択した垂直軸スケールでの変動は無視できるほど小さくなります。これは、閉ループフィードバック安定化の有効性を示しています。
VCOの残留周波数ノイズは、図8に示すように周波数データを連続的に記録する位相計を用いて測定されます。PIコントローラで同期したVCOは、フリーランニングVCOと比較して、時間領域における周波数変動が減少しています。ピークツーピーク周波数ノイズは、フリーランニング時の±800Hzから、同期後は±100Hzに減少しています。
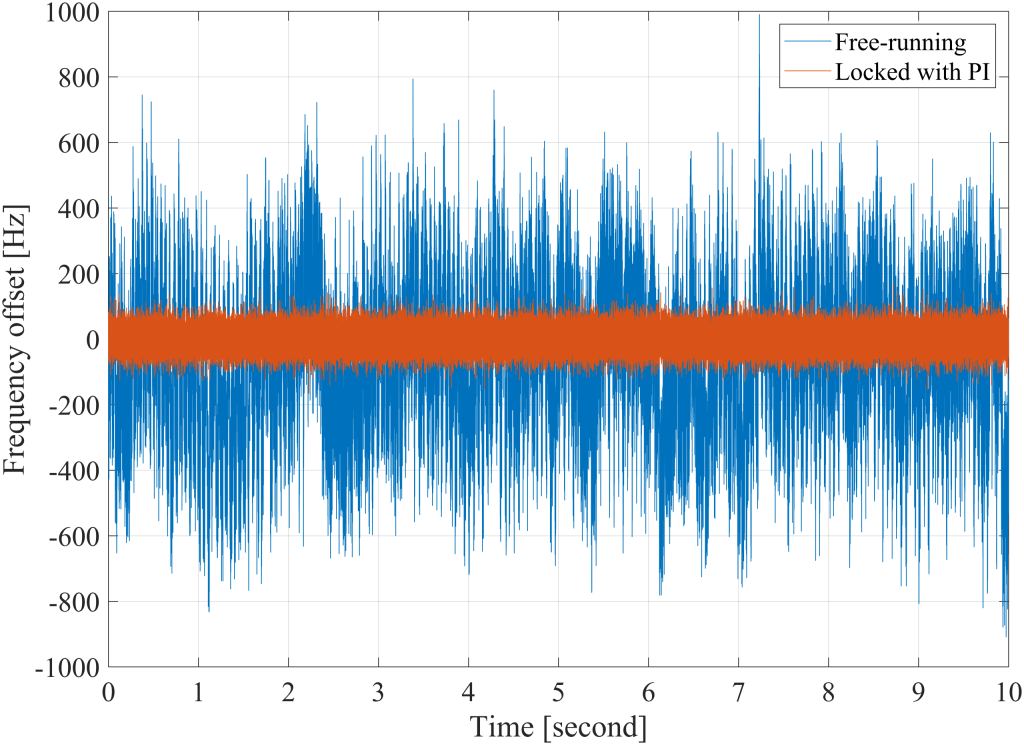
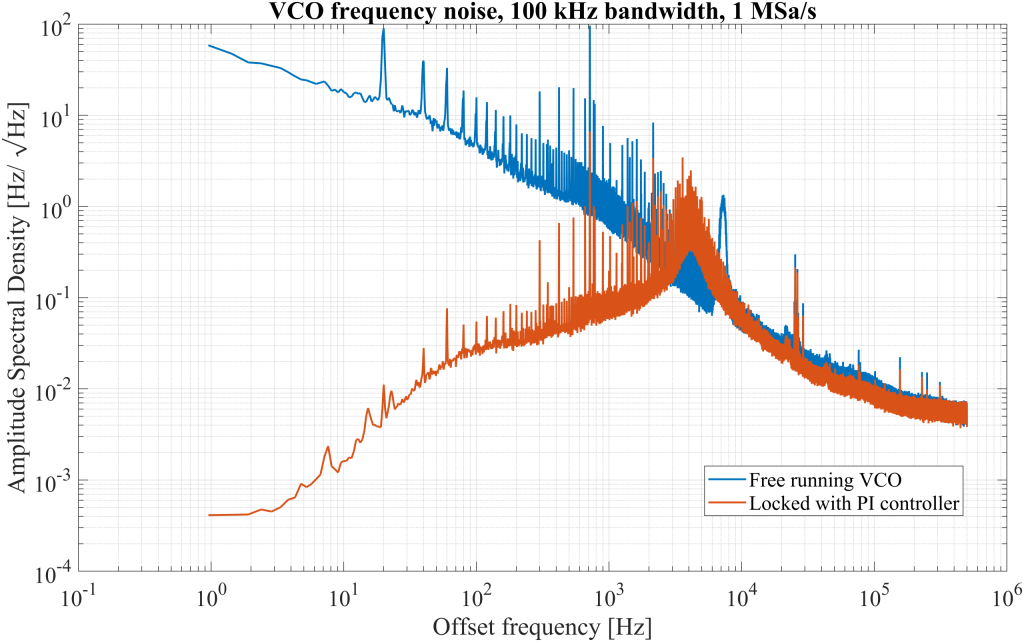
図9は、フリーランニングVCOとPIロックVCOの両方における周波数ノイズの振幅スペクトル密度(ASD)を示しています。フリーランニングの場合、20Hzとその高調波に小さなスペクトルトーンが観測されますが、これは電力網に関連する低調波干渉に起因するものと考えられます。
PIロックASDでは、4kHzのオフセット周波数付近に明確なノイズピークが現れます。理想的には、制御ループは追加のノイズ成分を発生させることなく、帯域幅全体にわたって位相ノイズと周波数ノイズを抑制する必要があります。
このピークの存在は、ループの位相余裕が不十分である可能性を示唆しています。位相余裕が小さすぎると、ループゲインと位相応答がユニティゲインクロスオーバー周波数付近で共振現象を引き起こし、ノイズを減衰させるのではなく増幅させる可能性があります。この現象はノイズピーキングと呼ばれ、ループダイナミクスの調整が必要である可能性を示しています。この問題については、次のセクションのOLTF解析でさらに詳しく検討します。また、同様のトピックについては、この論文の他の箇所でも取り上げています。 アプリケーションノート.
開ループ伝達関数測定
VCOフィードバックシステムの安定性と性能を最適化するには、周波数領域における動作を詳細に理解する必要があります。OLTFは、システムのゲイン、位相余裕、そして全体的な安定性に関する知見を提供するため、この解析において重要なツールとなります。これらの特性は、コントローラの比例、積分、微分の各コンポーネントをどのように調整すべきかを直接的に示します。このセクションでは、まずOLTFとその算出方法を紹介し、次にOLTFがシステム最適化にどのように役立つかについて説明します。
ループモデル
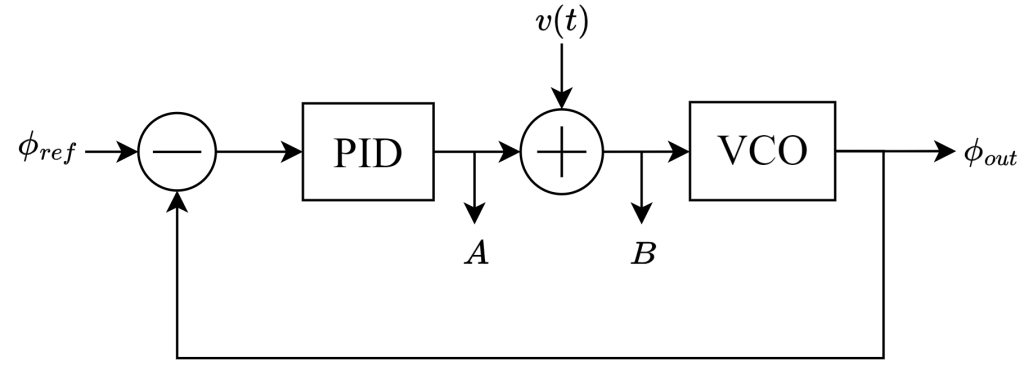
フィードバックループの簡略モデルを図10に示します。このモデルでは、位相検出器は減算器として表されており、ロック状態における機能を反映しています。つまり、基準信号とVCO出力の位相差を出力します。前述のように、この位相誤差は復調プロセスによって生成されます。ロック状態における誤差信号は次のようになります。
\(e(t) = \phi_{ref} – \phi_{out} \)
これはコントローラへの入力として機能します。この基礎に基づいてOLTFを導出し、測定することで、システムの安定性を評価し、パラメータ調整を体系的に導くことができます。
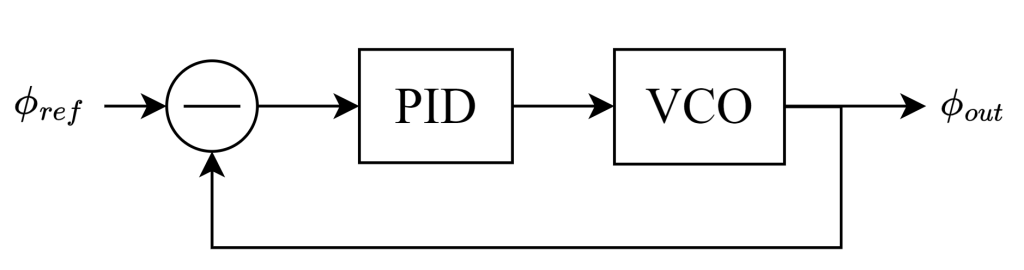
ラプラス領域におけるフィードバックループは、次式でモデル化できます。ここで、\(\text{PID}(s)\) と \(\text{VCO}(s)\) は、それぞれPID制御器とVCOの伝達関数を表します。なお、位相検出器(減算器)は、説明を簡略化するためにゲインが1であると仮定しています。実験では、システムモデリング中に位相検出器のゲインを認識し、補正する必要があります。
\(\left(\phi_{ref} – \phi_{out}\right) = \text{PID}(s) \times \text{VCO}(s) = \phi_{out}\)
ループを並べ替えると、閉ループ伝達関数(CLTF)\(H(s)\)は次のように表されます。
\(H(s) = \frac{\phi_{out}}{\phi_{ref}} = \frac{\text{PID}(s) \times \text{VCO}(s)}{1 + \text{PID}(s) \times \text{VCO}(s)} = \frac{G(s)}{1+G(s)}\)
ここで、\(G(s) = \text{PID}(s) \times \text{VCO}(s)\) はOLTFです。\(G(s)\) は閉ループシステムの動作を決定する上で中心的な役割を果たします。\(G(s)\) は閉ループ伝達関数 \(H(s)\) の分子と分母の両方に現れるため、その特性はシステムの安定性に直接影響します。特に重要なのは、\(G(s)=-1\) の条件です。この条件では \(H(s)\) の分母がゼロに近づき、無制限のゲインと不安定性につながります。フィードバックシステムの設計では、この重要なポイントを注意深く回避する必要があります。
システムがこの不安定性閾値にどの程度近づいているかを評価するために、ゲイン余裕や位相余裕といった周波数領域の安定性指標が使用されます。本セクションでは、これらの余裕を評価することで制御ループの堅牢性を判断し、制御器パラメータの更なる調整を導くことに焦点を当てます。
OLTF \(G(s)\)特性評価の最初のステップは、VCOの伝達関数を決定することです。これは、VCOのチューニングポートに掃引周波数ディザリング信号を注入し、それに応じたVCO出力の周波数変化を解析することで実現されます。
図11はVCOの伝達関数の特性評価に使用したセットアップを示しています。この構成では、 周波数応答アナライザ 低振幅掃引周波数ディザリング信号を生成し、それが アウトA VCOの周波数同調ポートに印加されます。この信号がVCOを駆動している間、周波数応答アナライザは振幅応答と位相応答を同時に測定します。
VCOの瞬時出力周波数は位相計によって測定され、10µV/Hzの周波数-電圧変換係数を用いて電圧信号に変換された後、周波数応答アナライザにフィードバックされます。この構成により、VCOの伝達関数を自動的かつ正確に測定することが可能になります。
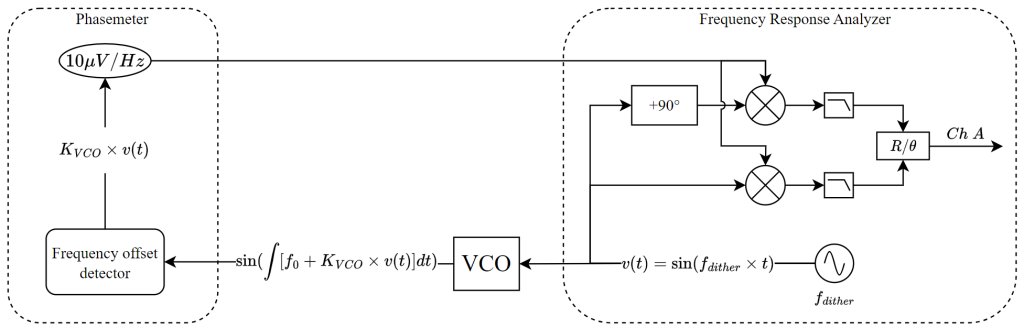
図12は、伝達関数測定に使用されるMoku:Proマルチインストゥルメントモードの構成を示しています。VCOの出力は インA 位相計はVCOの周波数を継続的に監視します。この周波数データは内部信号バスを介して インA 周波数応答アナライザーの。
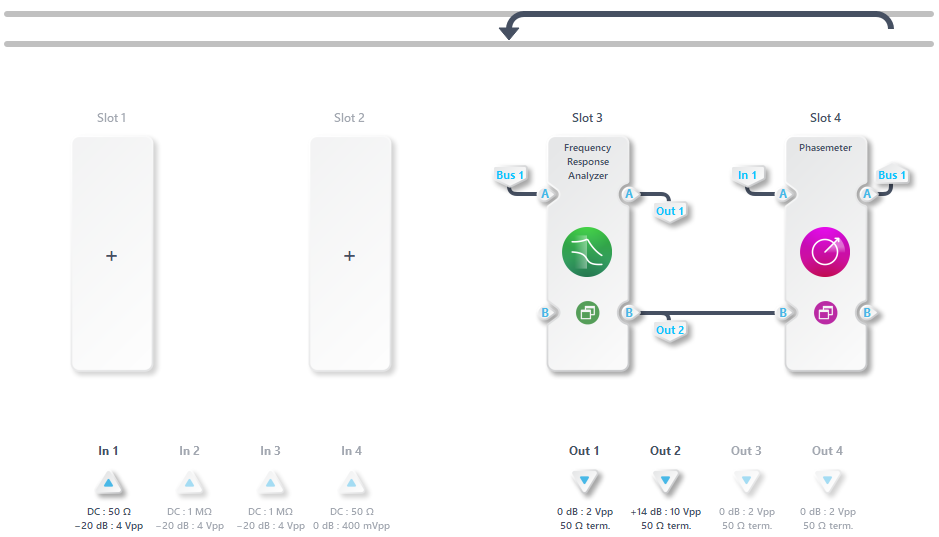
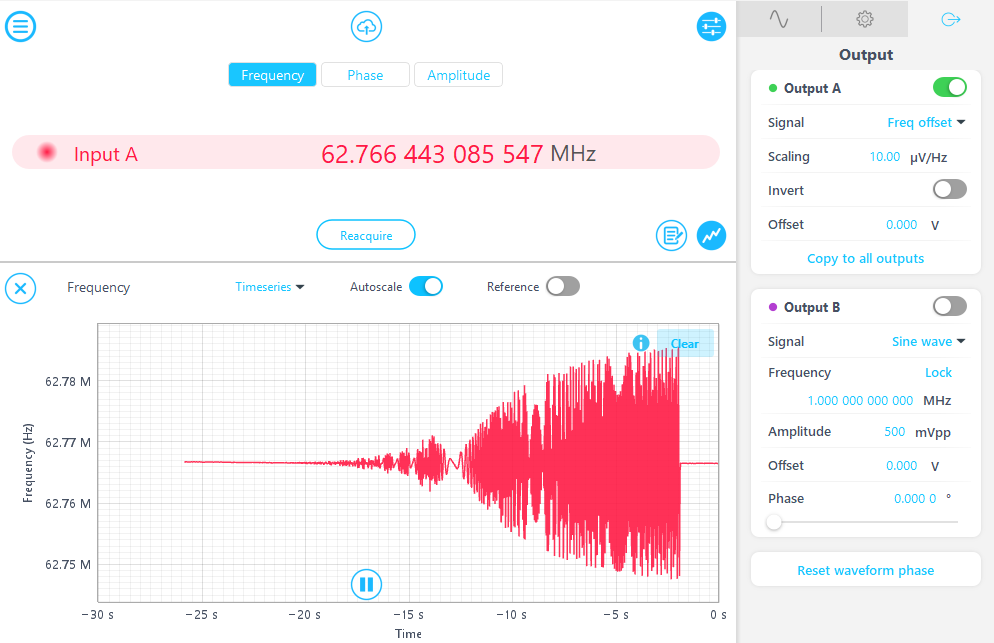
図13は、Phasemeterのユーザーインターフェースを示しており、測定された時間領域周波数トレースが表示されています。周波数オフセットは伝達関数測定のために周波数応答アナライザに送られます。表示されたデータから、VCO周波数偏差が時間とともに増加していることがわかります。周波数応答アナライザのディザリング出力振幅は、ディザリング信号周波数をスイープしている間、一定に保たれていることに注目することが重要です。これは、ディザリング信号がゆっくりと変化している場合にのみ、VCOがディザリング信号に効果的に追従できることを示しています。したがって、これはローパス応答としてモデル化できます。
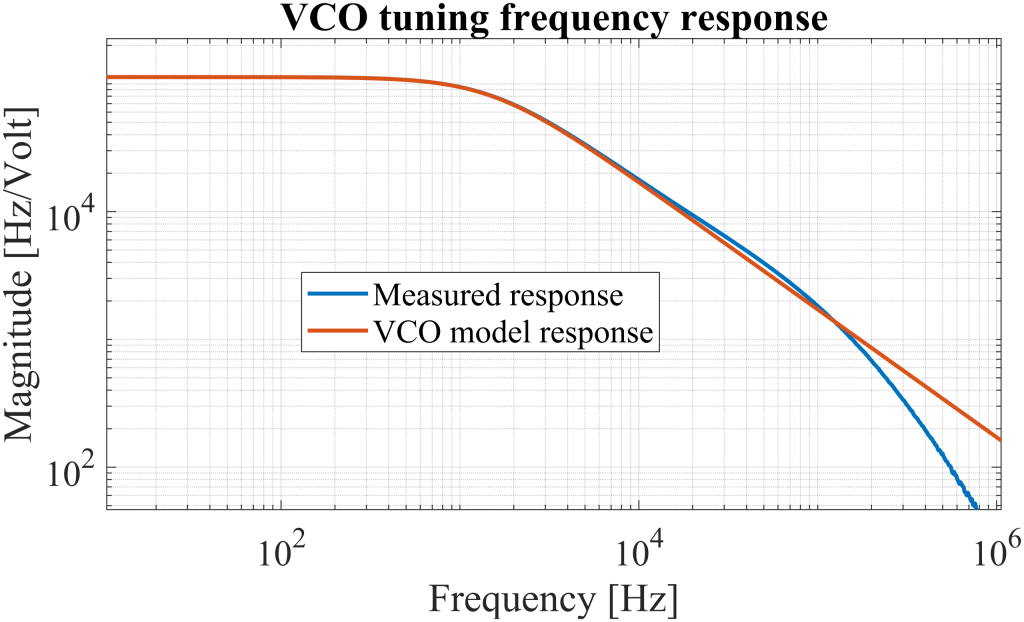
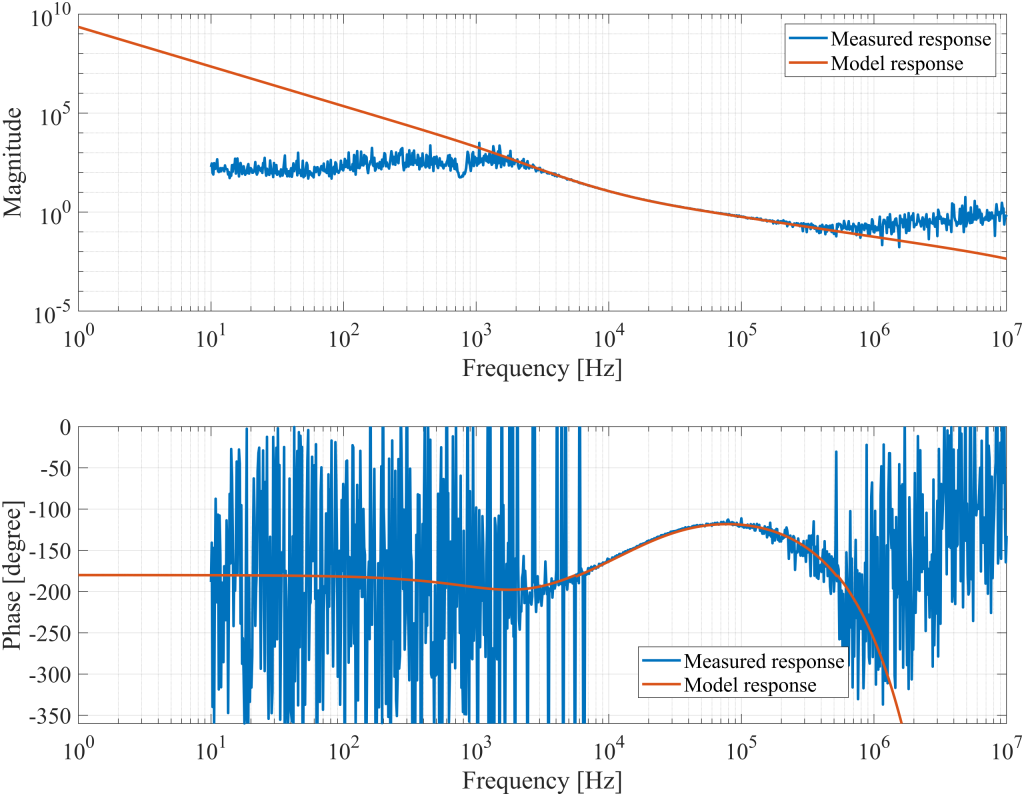
周波数オフセットは周波数応答アナライザによって処理され、ディザリング周波数範囲にわたって信号の振幅と位相が測定されます。測定されたVCOの応答を図14に示します。ローパスコーナー周波数は9.538kHzと推定され、VCOゲインは約83,497Hz/Vです。
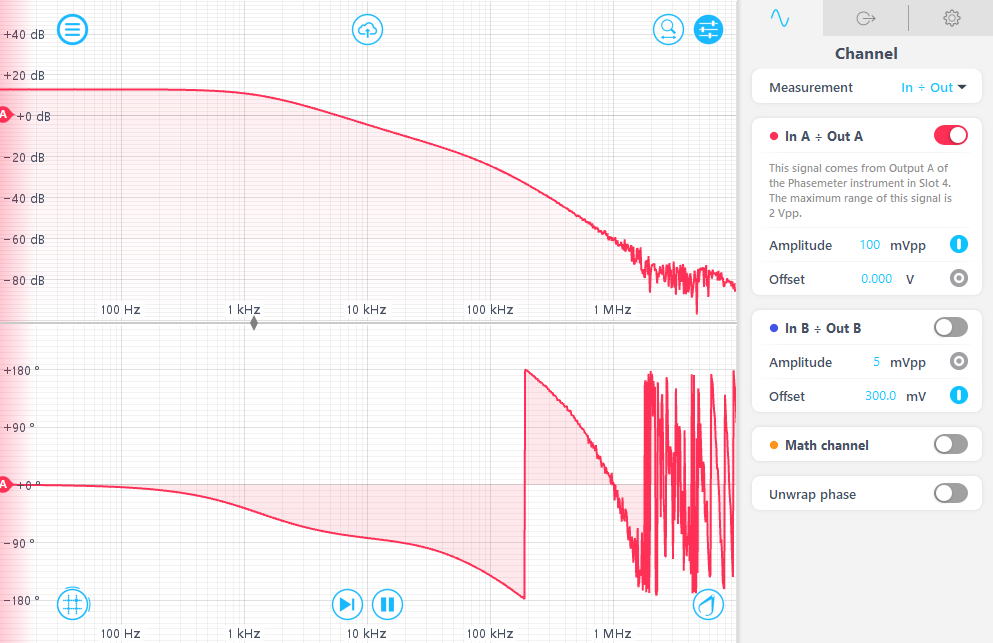
図15に示すVCO周波数応答は、周波数応答アナライザを用いて測定した周波数応答を、位相計の周波数-電圧変換係数を用いて正規化することで得られます。応答には2つの極が見られますが、2つ目の極は位相計のトラッキング帯域幅の制限に起因するため、無視できます。VCO応答とコントローラの応答を組み合わせることで、OLTFを決定できます。ロックインアンプ内のローパスフィルタは、この解析から除外しています。そのコーナー周波数は12.3MHzで、対象周波数範囲をはるかに超えており、低周波領域ではOLTFに大きな影響を与えないためです。
MATLABでシステムをモデル化するために、OLTFは以下のように構築できる。PI制御器モデルは、前述のs領域表現に基づいている。 制御シリーズのアプリケーションノート.

システムパラメータは次のように設定されています:\(f_{VCO} = \text{9.538 kHz}\), \(G_{VCO} = \text{83,497 Hz/volt}\), \(P_{dB} = \text{-10 dB}\), \(I_{cross} = \text{100 Hz}\)。ロックインアンプで検出されたエラー信号は位相で表現されるため、OLTFには周波数から位相への変換を表すVCO積分器が含まれていることに注意することが重要です。さらに、450 nsの遅延は、ロックインアンプの処理遅延とMoku:Proの入出力間の遅延を考慮しています。モデルが確立されると、次のステップでは実際のOLTFを測定し、モデル化された応答と比較して精度を検証します。
ループ測定
制御理論シリーズの以前にリリースされたアプリケーションノートを参照すると、\(G(s)\)を測定するためのブロック図を図16に示します。このセットアップでは、ディザリング信号はPIDコントローラとVCOの間のポイントで注入されます。
各点における伝達関数 A の三脚と B フィードバックループ内の位相は、外部から注入されたディザリング信号に対するシステムの応答から導き出すことができます。この測定中、基準位相\(\phi_{ref}\)はゼロに設定され、位相検出器はループに負の符号のみを付加します。
ポイント A伝達関数は次のように表すことができます。
\(\left( A(s) + V(s) \right) \times \text{VCO}(s) \times -1 \times \text{PID}(s) = A(s)\)
ここで、\(V(s)\)は注入されたディザリング信号\(v(t)\)のラプラス変換である。
この式を整理すると、注入された信号から点の出力までの伝達関数が得られる。 A:
\(\frac{A(s)}{V(s)} = \frac{-1 \times \text{VCO}(s) \times \text{PID}(s)}{1 + \text{VCO}(s) \times \text{PID}(s)} = \frac{-G(s)}{1+G(s)}\)
この式は、高いループゲイン\(G(s) \gg 1\)の場合、点 A 入力の負の値、つまり\(\frac{A(s)}{V(s)} \approx -1\)に厳密に追従し、これは負の参照追従に対応します。
ポイント B関係は次のように表すことができます。
\(B(s) \times \text{VCO}(s) \times -1 \times \text{PID}(s) + V(s) = B(s)\)
伝達関数を解くと次のようになります。
\(\frac{B(s)}{V(s)} = \frac{1}{1 + \text{VCO}(s) \times \text{PID}(s)} = \frac{1}{1+G(s)}\)
これは、\(G(s)\)が大きい場合、点 B 大幅に減衰する。その結果、点 B 外乱除去を特徴付け、その時点でのディザリング信号\(V(s)\)を効果的に抑制します。
各点における伝達関数の比をとることによって A の三脚と BOLTF \(G(s)\) を復元することができます。
\(\frac{A(s)}{B(s)} = -G(s)\)
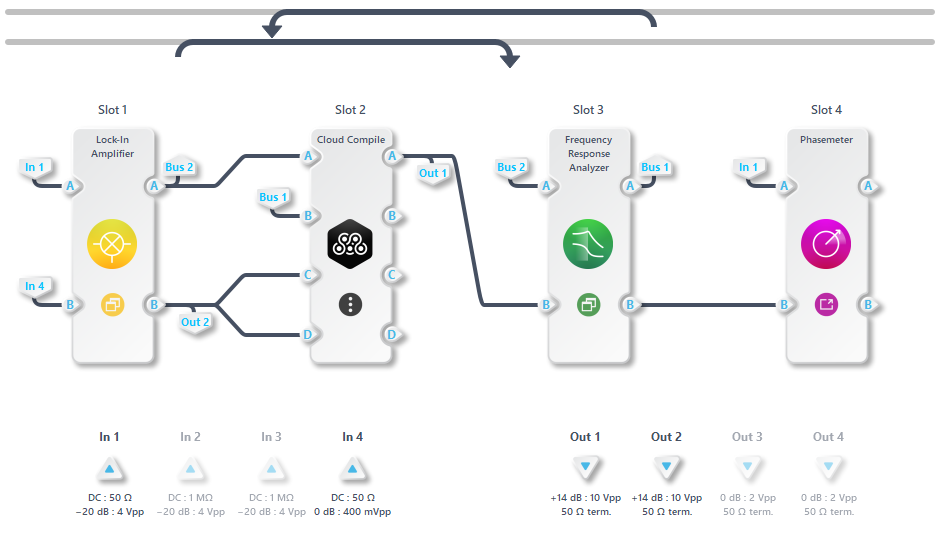
図17に示す実験装置はこの概念を実装している。ディザリング信号\(v(t)\)は、 Mokuクラウドコンパイル 単純な加算器として構成されています。注入前の制御信号\(c(t)\)と注入後の合成信号\(c(t)+v(t)\)は、周波数応答アナライザの2つのチャンネルを使用して同時に測定されます。これにより、システムは各ポイントにおける伝達関数を捕捉できます。 A の三脚と B 分析用。
マルチ インストゥルメント モードの構成は図 18 に示されており、図 17 に示すブロック図に対応しています。スロット 4 の位相計は監視目的にのみ使用され、フィードバック制御ループには参加しないことに注意してください。
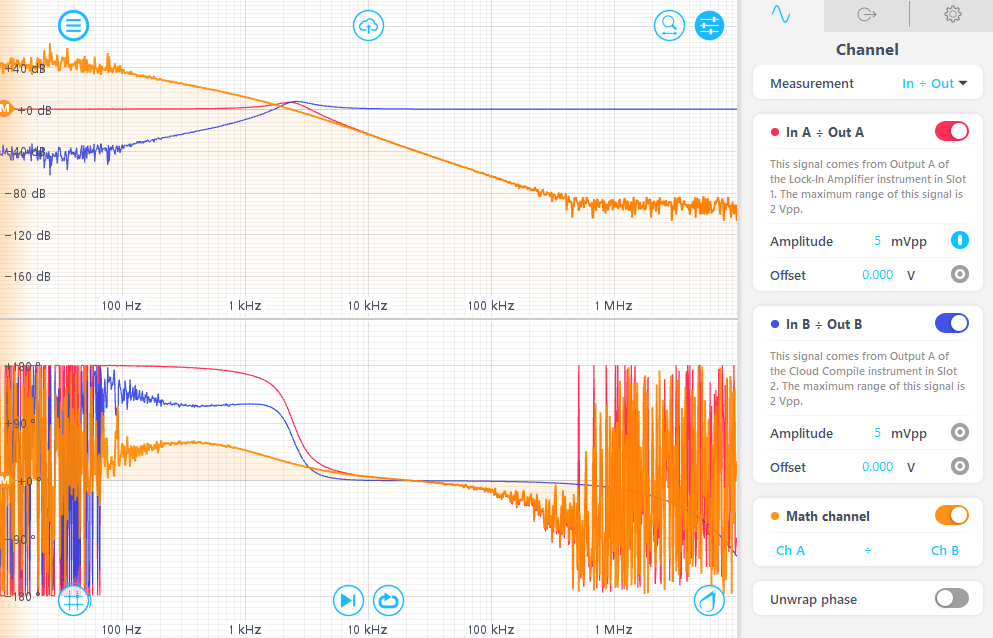
周波数応答アナライザのユーザーインターフェースを図19に示します。この設定では、チャネルA(赤いトレース)は、ディザリング信号\(v(t)\)から制御信号\(c(t)\)への伝達関数を表しています。チャネルB(青いトレース)は、VCOへのチューニング入力を表す合成信号\(c(t)+v(t)\)を示しています。OLTFは、チャネルAの振幅をチャネルBの振幅から除算し、位相を減算することで得られます。得られたOLTFは、Mathチャネル(オレンジ色のトレース)に表示されます。
前のセクションで開発したOLTFモデルをMATLABでシミュレーションし、周波数応答アナライザで得られた実測応答と比較しました(図20)。シミュレーションは、振幅と位相の両方において実測データと高い一致を示しています。負帰還構成によって生じる固有の位相反転を考慮するため、実測位相応答からさらに180°が差し引かれています。
測定はユニティゲイン周波数付近で最も正確です。より高い周波数では、制御ループは注入されたディザリング信号をポイントで追跡するのに十分な帯域幅がありません。 A (図16)により、測定の忠実度が低下します。スペクトルの反対側では、非常に低い周波数はループによって強く抑制され、点v(t)におけるディザリング信号\(v(t)\)の残差は最小限に抑えられます。 B (図16)そのため、低周波数領域と高周波数領域の両方での測定の有用性が制限されます。
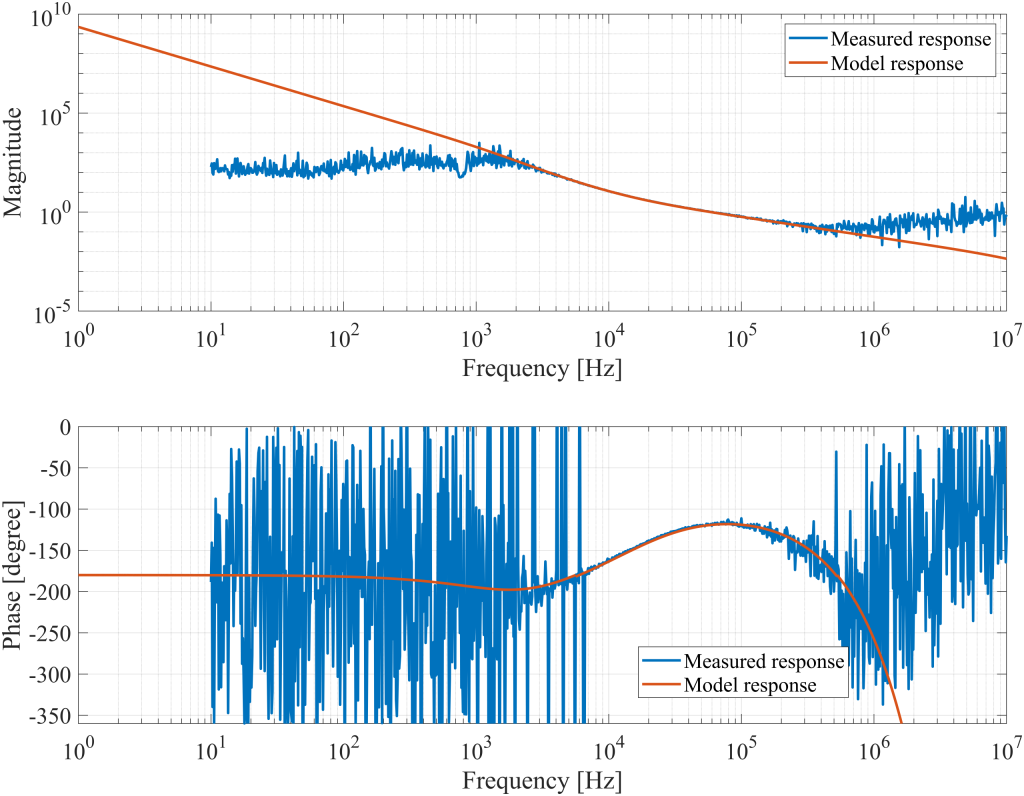
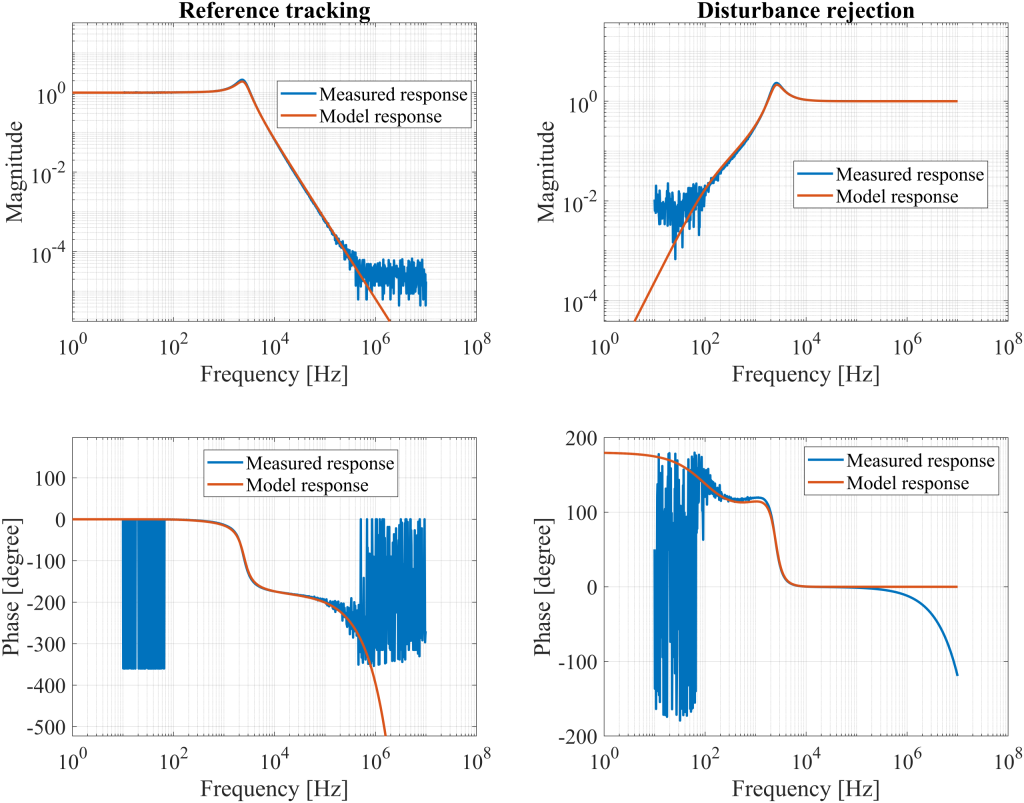
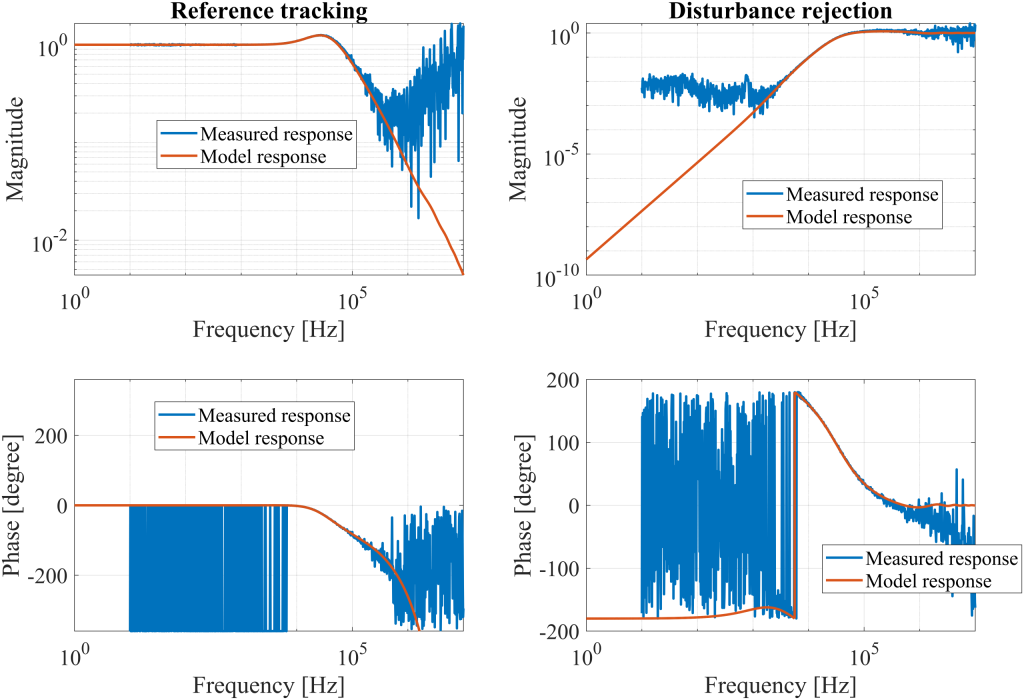
図 20 に示されている OLTF に加えて、参照追跡応答と外乱除去応答も生成され、図 21 に表示されています。測定された参照追跡では、測定応答が一般的な \(\frac{G(s)}{1+G(s)}\) 形式ではなく \(\frac{-G(s)}{1+G(s)}\) であるため、位相応答は 180° シフトされています。
外乱除去応答では 3 kHz 付近にゲイン ピークが現れますが、これは図 9 に示すロック後の測定周波数ノイズで観測されたノイズ ピークに対応します。このゲイン ピーキングは、現在の OLTF の位相マージンが小さいために発生し、ノイズが減少するのではなく増加します。
ループ最適化
OLTFを測定し、システムをモデリングする主な目的は、同期ループの性能を最適化することです。前回のアプリケーションノートで説明したように、OLTFから得られる主要な指標であるループゲイン、位相余裕、ゲイン余裕は、フィードバックシステムの評価と改善に不可欠です。効果的な制御システムは、外乱を抑制するために低周波ゲインを最大化すると同時に、ノイズやパラメータ変動に対する安定性と堅牢性を確保するために十分な位相余裕とゲイン余裕を維持する必要があります。
1 kHzの微分項を追加
図20のOLTFプロットに示すように、PI制御フィードバックループにはユニティゲイン周波数付近に3つの寄与極があります。これらは、周波数から位相への変換を行うVCOの内蔵積分器、その1次ローパス応答、そしてPIコントローラの積分器コンポーネントに起因しています。これら3つの極は合計で270°の位相シフトを生じ、適切に制御しないと不安定性が生じるリスクがあります。
ユニティゲイン周波数は、PI積分器のクロスオーバーポイント100HzとVCOローパスフィルタのコーナー周波数9.538kHzの間に位置しています。この中間領域では、PI積分器の効果は減少しつつありますが、ローパスフィルタの極の影響はまだ完全には確立されていません。この重なりによってわずかな位相の隆起が生じ、ユニティゲイン周波数は、限られた範囲ではあるものの十分な位相余裕を提供する領域に配置されます。その結果、システムは約30°の位相余裕と約76.47°のゲイン余裕を維持し、安定した動作を実現します。
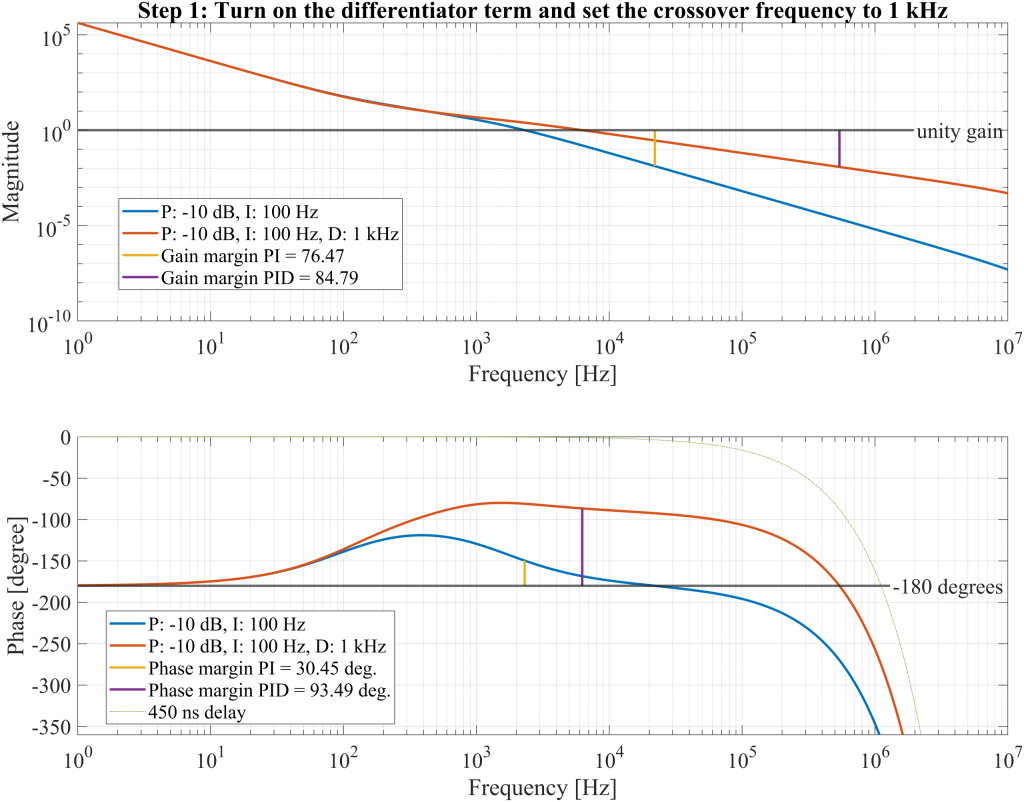
図22には、ロックインアンプの処理時間と入出力レイテンシによって生じる450nsの遅延を表す参照線が示されています。この遅延はまだシステムの位相余裕を制限していないため、位相補償を追加できる余地があることを示しています。安定性を高めるために、1~100kHzの周波数範囲において、コントローラに微分器項を追加することで、最大90°の位相進みを実現できます。この場合、クロスオーバー周波数が1kHzの微分器が導入されます。修正されたPIDコントローラとそれに対応するOLTFは、次の式で表されます。

比較のため、微分器項を含む更新された OLTF \(G_{PID}(s)\) が図 22 にプロットされています。微分器のクロスオーバー周波数 \(D_{cross}\) は 1 kHz に設定されていますが、他のすべてのパラメーターは以前の PI 制御ループ \(G_{PI}(s)\) と同じままです。図 22 では、青い曲線は \(G_{PI}(s)\) を表し、オレンジ色の曲線は強化された \(G_{PID}(s)\) を表しています。両方の構成のゲイン余裕と位相余裕も示されています。ゲイン余裕はほとんど変化しませんが、位相余裕は大幅に増加しており、PI の場合の 30.45° から PID 構成では 93.49° になっています。これにより、1 kHz 微分器を導入することの有効性が確認できます。さらに、PID の場合はユニティ ゲイン周波数が高くシフトしており、制御帯域幅が拡大していることがわかります。
\(G_{PID}(s)\) の位相応答は高周波数での固有の遅延によって制約されるため、さらなる最適化では振幅応答の改善に重点が置かれます。
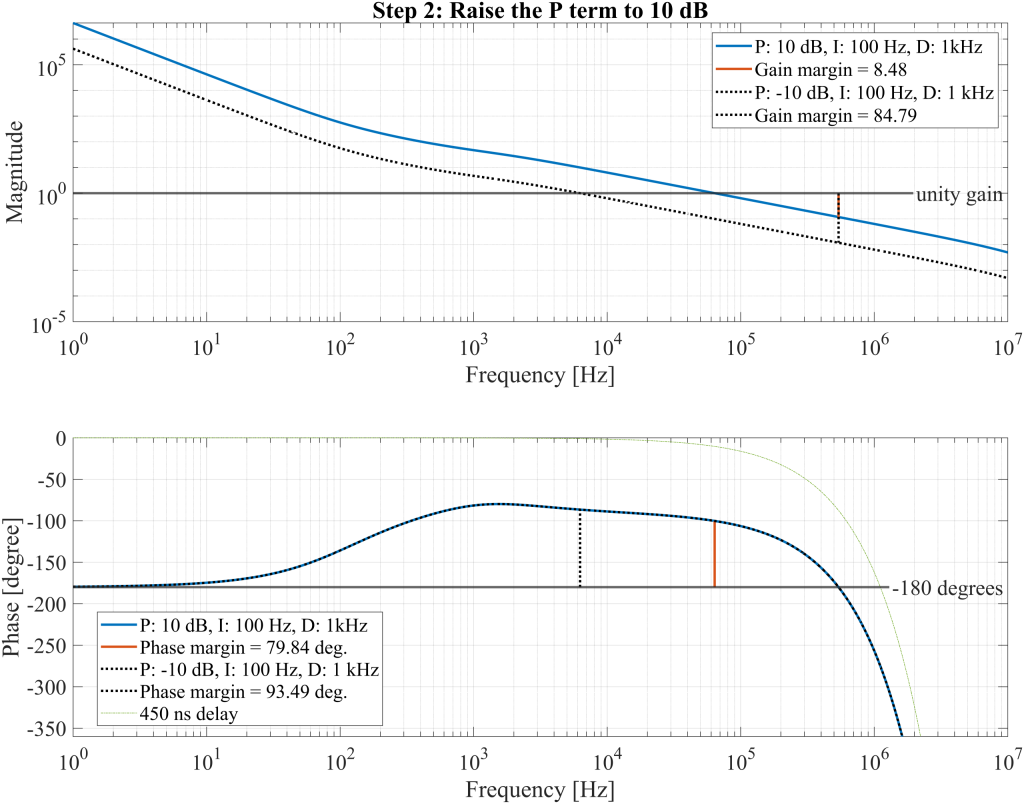
比例ゲインを10 dBに上げる
1 kHz微分器の導入により、1~100 kHzの周波数範囲で位相余裕が大幅に改善され、ゲイン余裕は84.79に達します。これにより、比例ゲインを増大させ、システムの安定性を維持しながら開ループゲインを向上させる十分な余裕が生まれます。比例ゲインを20 dB増加させることは許容範囲です。これは、ゲイン余裕が8.479に減少し、ユニティゲイン周波数が約60 kHzにシフトするためです。この周波数は依然として安定動作範囲内にあります。その結果、ゲイン余裕と位相余裕はどちらも十分なままで、ループゲインは20 dB増加します。更新されたOLTFを図23に示します。図には、修正されたゲイン余裕と位相余裕も示されています。
積分器と微分器の周波数を高くする
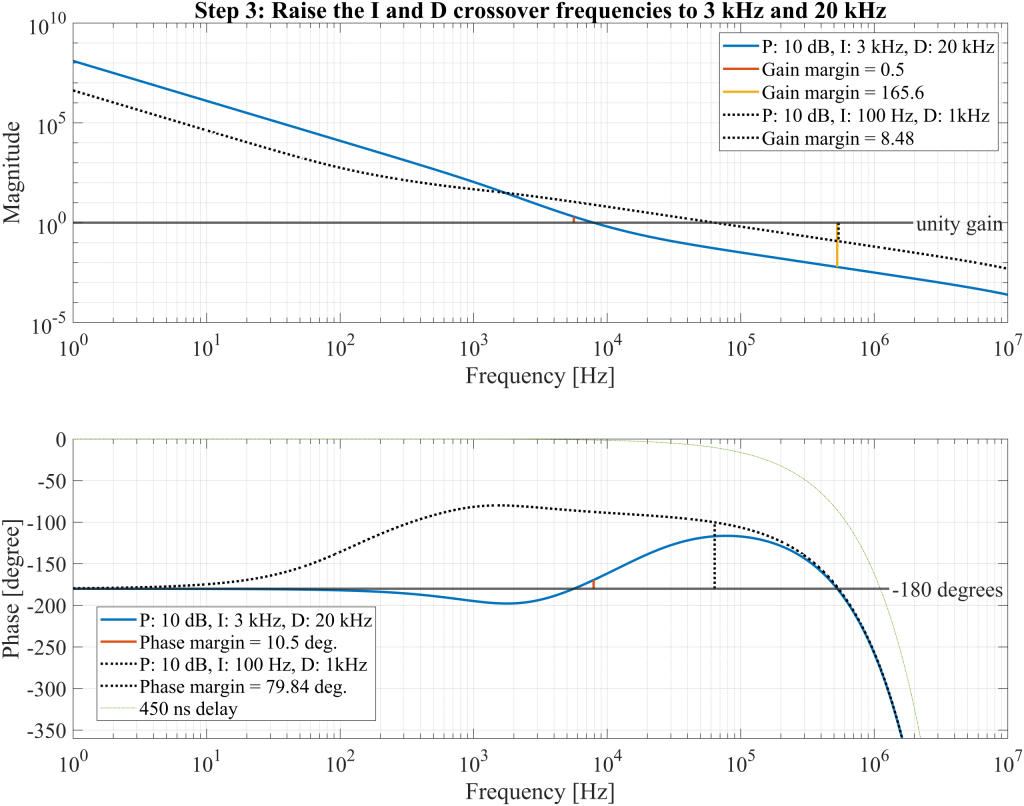
低周波ゲインをさらに高めるには、積分器と微分器のゲインを上げることができます。1kHz~100kHzの位相ヘッドルームにより、高周波数における位相余裕に大きな影響を与えることなく、このようなトレードオフが可能です。この構成では、積分器のクロスオーバー周波数を3kHz、微分器のクロスオーバー周波数を20kHzに上げることで、低周波ループゲインをさらに高めることができます。
更新されたOLTFを図24に示します。ゲインマージンと位相マージンの両方が注釈として示されています。これらのマージンが制限されているため、システムが不安定になる可能性があることを示唆しています。伝達関数を調べると、微分器のクロスオーバー周波数の上昇により、ユニティゲイン周波数が8kHzにシフトしていることがわかります。しかし、約100kHzでは、位相は臨界閾値-180°を大きく上回っています。これは、比例ゲインを追加することでユニティゲイン周波数を引き上げ、位相マージンを回復できることを示しています。
OLTFは-180°位相を複数回横切るため、ゲインマージンが複数存在することになりますが、重要な点は、不安定性の臨界点(\(G(s)=-1\))に最も近い2つのマージンのみです。比例ゲインを増加させると、\(|G(s)|\)は5.6kHz付近でユニティゲインから遠ざかり、同時に528kHz付近でユニティゲインに近づきます。この変化により、ユニティゲイン周波数の両側のゲインマージンの間にトレードオフが生じます。
比例ゲインを35 dBに上げる
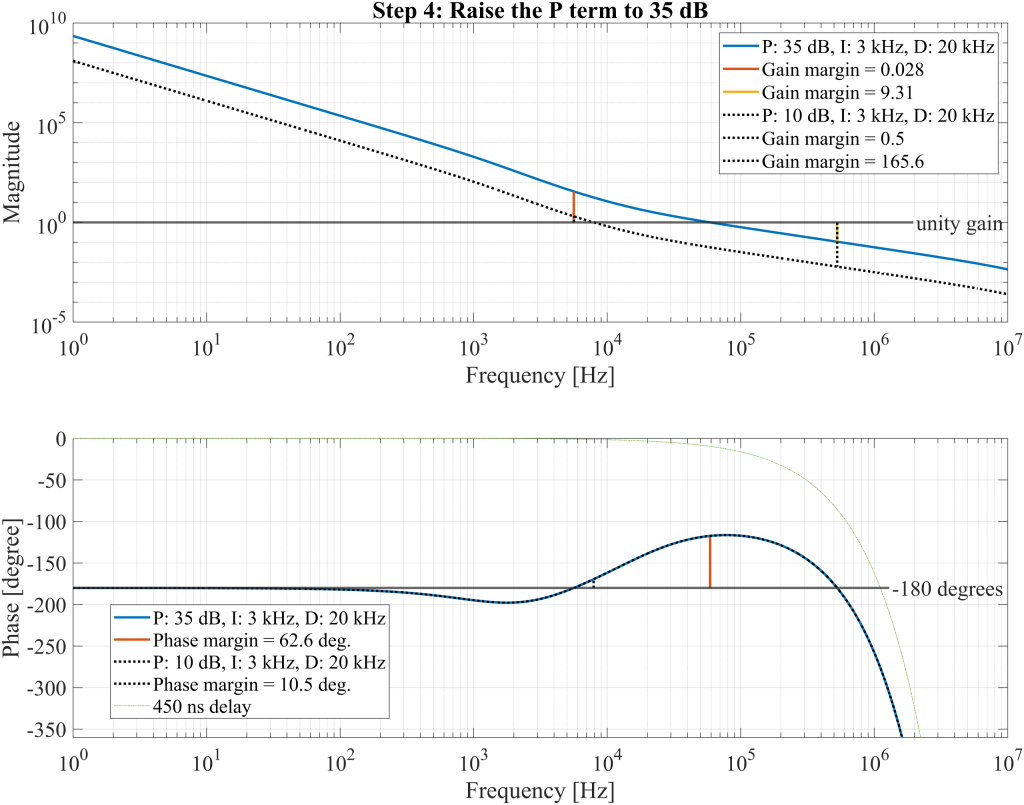
比例ゲインを上げることでループの安定性とゲインの両方が向上するという理解に基づき、比例ゲインを35 dB(25 dBの増加)に上げます。この調整により、ユニティゲイン周波数が約70 kHzにシフトし、位相余裕がより良好になるとともに、ユニティポイントの両側にある2つのゲイン余裕のバランスも取れます。更新された開ループ伝達関数を図25に示します。位相余裕は62.6°、ゲイン余裕は0.028と9.31となり、システムが\(G(s)=-1\)から適切な安全余裕を持っていることを示しています。
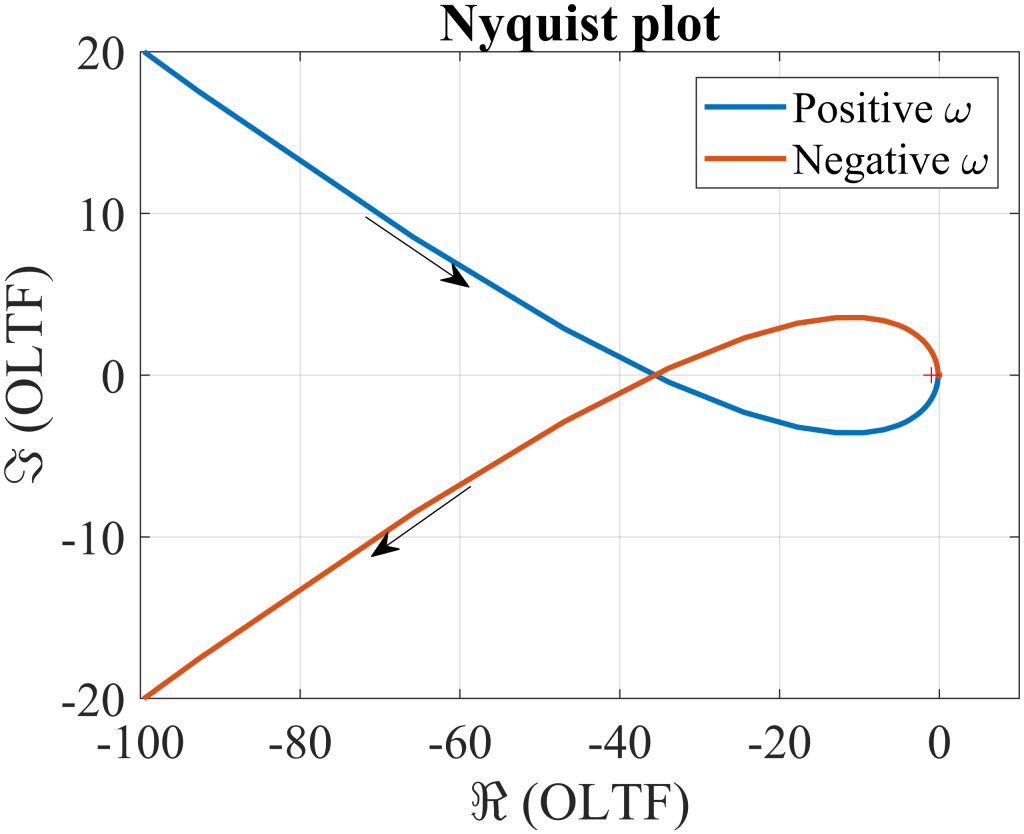
ナイキスト基準による安定性解析
図25では、位相応答が180°点を2回横切っていることがわかります。これらの横切点の1つは5.6 kHz付近で発生し、ゲイン \(|G(s)|\) が1より大きい値に相当します。この状態は、その周波数で正帰還を引き起こし、ノイズを増幅して不安定性を引き起こす可能性があります。システムの安定性をより厳密に評価するには、閉ループシステムの極を解析することが不可欠です。基本的な閉ループ式を思い出すと、システムの出力から入力への伝達関数は \(H(s)= \frac{G(s)}{1+G(s)}\) で表され、\(H(s)\) の極は \(1+G(s)\) の零点となります。
この分析に有用な方法は、ナイキスト線図であり、これはOLTF \(G(s)\)を、 s 平面。このアプローチは、純粋な遅延\(e^{-\tau s}\)を含むシステムで特に有用である。なぜなら、そのような遅延は超越的であり、集中定数モデルでは正確に表現できないからである。ナイキスト基準の完全な説明はこのノートの範囲外であるが、多くの資料がそれを徹底的に説明している(第3章)。 フィードバック理論ガイド ジョエル・L・ドーソン著の『The 1st Century Fox』は、入門書として最適です。
ナイキスト基準を適用するには、Pを\(G(s)\)の右半分の極の数とします。 s 飛行機、そして N 臨界点\((-1,0j)\)の周りの円周の数を表す。そして Z右半平面における \(1+G(s)\) の零点の数は、関係式 \(N=ZP\) を満たす。したがって、 \(G(s)\) の右半平面における極の数を決定し、 \((-1,0j)\) の包囲数を数えることで、閉ループ系の安定性を直接推測することができる。
図26はシステムのナイキスト線図を示しており、臨界点\((-1,0j)\)は赤い十字で示されています。この線図は、図25の\((-1,0j)\)を反時計回りに1回囲んでいることを示しており、潜在的な不安定性を示唆しています。しかし、ループ内に2つの純粋な積分器(1つはVCOの周波数から位相への変換用、もう1つはPIDコントローラ用)が存在するため、線図は無限大の半径まで広がり、定量的な分析は不可能です。システムは定性的な手法を用いて評価する必要があります。
複素周波数変数sがs平面において原点を中心として反時計回りに180°回転すると、原点の極で表される2つの積分器は、ナイキスト線図において無限半径において合計360°の時計回り位相シフトを与えます。これにより、最初の反時計回りの円運動が打ち消され、結果として正味の円運動はゼロになります。
OLTFの右半分には極がないので s 平面上で点\((-1,0j)\)の全周もゼロであるため、閉ループシステムはs平面の右半分に極を持たない。したがって、最適化されたシステムは安定を維持する。
最適化されたループの開ループ伝達関数
OLTFを最適化し、閉ループシステムの安定性を検証した後、PIDコントローラを比例ゲイン35dB、積分器のクロスオーバー周波数3kHz、微分器のクロスオーバー周波数20kHzに設定します。その後、システムの測定を行い、モデルの妥当性を検証します。図27は、測定されたOLTFとシミュレーション結果の両方を示しており、図28はシステムの参照値追従と外乱除去を示しています。測定結果はモデル予測とほぼ一致しています。
ノイズ特性
このセクションでは、同じ Moku:Pro デバイスを使用して周波数ノイズを評価します。内部クロックをリファレンスとして使用します。そのため、クロック自体のジッタや位相ノイズは測定から除外されます。センサーノイズが周波数ノイズ解析に与える影響を低減するために、ループ外周波数センサーが使用されます。この構成では、センサーノイズの主な発生源はアナログ/デジタルコンバーター (ADC) です。図 29 に示すように、測定精度を向上させるために、VCO 出力は 2 つの別々のパスに分割されます。1 つのパスは ADC 入力 1 に送信され、フィードバックループのエラー信号を生成します。もう 1 つのパスは ADC 入力 3 と位相計にルーティングされ、位相計は VCO の周波数ノイズを測定するための独立したループ外センサーとして機能します。
周波数ノイズは、フリーランニング、PIコントローラによる同期、最適化されたPIDコントローラによる同期の3つの条件下で測定されました。時間領域の結果は図30に示されています。最適化されたPIDコントローラは、ピークツーピーク周波数ノイズが約±20 Hzとなり、位相計のノイズフロア(紫色の線で表示)に近づいています。
この性能は、制御ループが外乱を \(\frac{1}{1+G(s)}\) の1/1に減衰させることで実現されます。最適化された構成では、ループゲインは十分に高く、VCO周波数に影響を与える可能性のある環境振動や温度変化など、ループ内のノイズを効果的に抑制します。
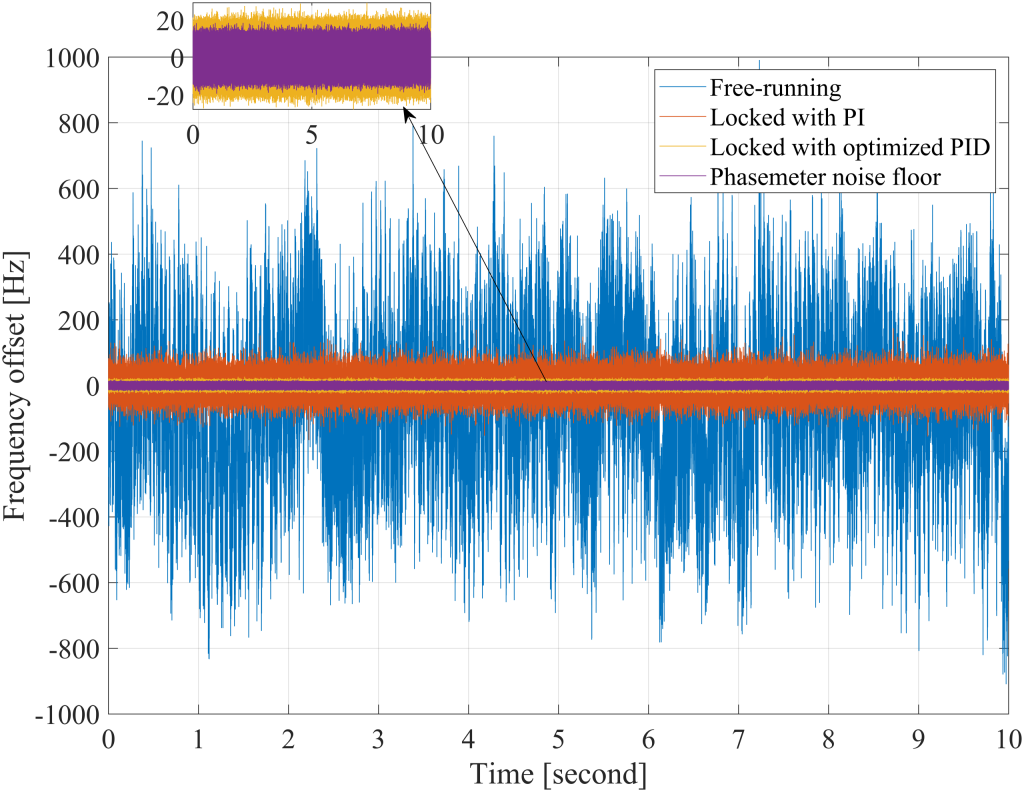
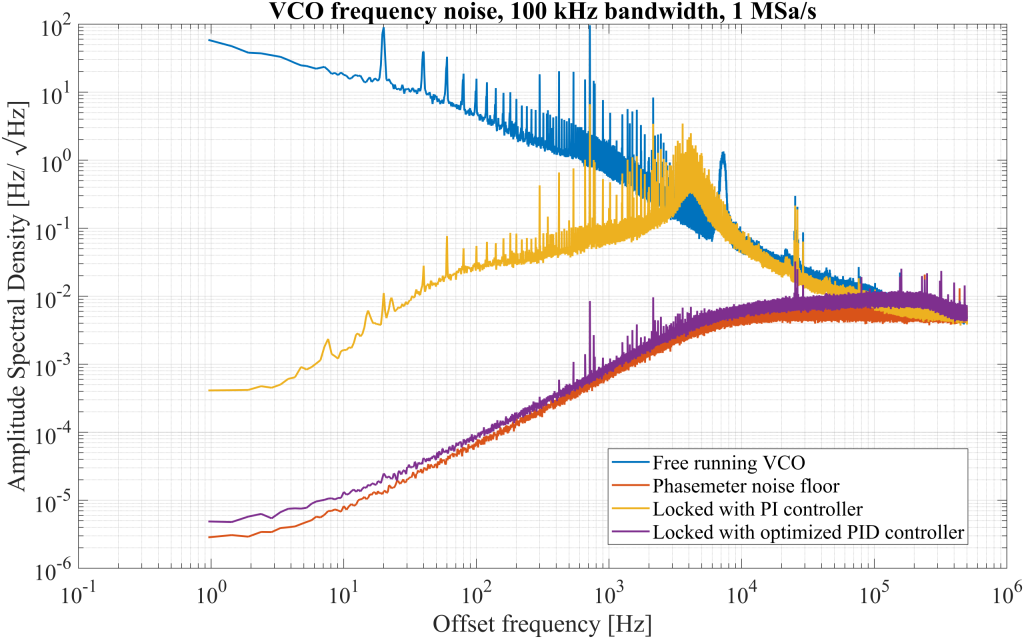
図31は、測定された周波数ノイズのASDを示しています。最適化されたPIDコントローラに対応する紫色のトレースは、位相計のノイズフロアとほぼ一致しており、システムが性能限界付近で動作していることを示しています。顕著なノイズピークが見られないことから、最適化された開ループ伝達関数が十分な位相余裕を提供し、安定した良好な減衰特性を実現していることがさらに確認できます。
製品概要
このアプリケーションノートでは、VCOとPIDコントローラを内蔵したロックインアンプで構成されるPLLシステムの解析と最適化について詳しく説明します。比例、積分、微分の各コンポーネントを体系的に調整することで、OLTF \(G(s)\)はループゲインを最大化しつつ、十分な位相余裕とゲイン余裕を維持し、安定した動作を確保するように形成されました。システムの安定性はナイキスト基準を用いて確認され、CLTF \(H(s)\)に右半平面極が存在しないことが検証されました。
実験検証では、OLTFの測定値とシミュレーション結果の比較が行われ、良好な一致が示されました。周波数ノイズ性能は、フリーランニング、PIコントローラによる同期、最適化されたPIDコントローラによる同期の3つの動作条件下で評価されました。最適化された構成では、Phasemeterのノイズフロアに近い性能が得られ、機械振動や温度による周波数ドリフトなどの外乱を抑制する効果が実証されました。

