



개요
이전에 논의한 바와 같이 제어 이론 응용 노트 시리즈에서 주파수 영역 분석은 피드백 시스템의 설계 및 평가, 특히 안정성과 전반적인 잡음 제거 성능을 평가하는 데 중요한 역할을 합니다. 이전 노트에서는 라플라스 영역의 이론적 원리에 초점을 맞추었지만, 이 응용 노트에서는 실제 사례를 사용하여 이러한 개념을 실제로 구현하는 방법을 살펴봅니다. Moku:Pro 그리고 전압 제어 발진기(VCO)는 인가된 제어 전압에 따라 출력 주파수가 변하는 전자 발진기로, 신호 생성 및 통신 시스템과 같은 애플리케이션에 대한 정밀한 주파수 튜닝 및 변조를 허용합니다.
A 위상 고정 루프(PLL) 출력 신호의 위상과 주파수를 기준 입력에 맞춰 조정하는 피드백 시스템입니다. 위상 검출기에서 검출된 기준 신호와 피드백 신호의 위상차를 기반으로 VCO 출력 주파수를 지속적으로 조정합니다. PLL은 안정적이고 지터가 낮은 신호를 생성하고 다양한 기준 주파수를 정확하게 추적할 수 있어 통신 시스템, 신호 합성 및 클럭 복구에 널리 사용됩니다. 또한, 데드타임이나 위상 랩 없이 고정밀 위상 및 주파수 측정으로 유명한 Moku 위상계(Phasemeter)의 핵심 요소입니다.
이 애플리케이션 노트에서는 Moku를 사용하여 위상 잠금 루프(PLL)를 구성하는 방법을 설명합니다. 락인 증폭기, 그리고 개루프 전달 함수(OLTF)의 측정 및 최적화를 포함합니다. 이 과정은 경험적 튜닝을 통해 결정된 초기 제어기 구성으로 시작됩니다. OLTF는 먼저 모델링되고, 위상 및 이득 마진을 포함한 주요 안정성 지표를 평가하기 위해 실험 측정을 통해 검증됩니다. 이러한 결과는 충분한 안정성 마진을 유지하면서 저주파 이득을 증가시키는 최적화 과정을 알려줍니다. 마지막으로, 초기 제어기와 최적화된 제어기 모두의 주파수 잡음 측정값을 비교하여 피드백 루프 성능 개선을 평가합니다.
실험 설정
VCO를 안정화하려면 주파수 기준이 필요하며, 이는 일반적으로 루비듐 제어 클록과 같은 고정밀 소스에서 제공됩니다. 이 실험에서는 Moku Pro의 고정밀 내부 파형 발생기가 기준 주파수를 제공하며, 이 파형 발생기는 록인 앰프 모듈 내에서 국부 발진기 역할을 합니다.
Moku 플랫폼은 VCO 피드백 제어에 사용되는 위상 차이(오차 신호라고도 함)를 추출하는 두 가지 주요 방법을 제공합니다. 첫 번째 방법은 위상계(Phasemeter)를 사용하여 VCO 출력의 주파수와 위상을 직접 추적하는 것입니다. 본 애플리케이션에서 사용되는 두 번째 방법은 록인 증폭기(Lock-in Amplifier)를 사용하여 VCO 신호를 국부 발진기(LOC)로 복조하여 오차 신호를 생성하는 것입니다. 이 방식은 구조적 단순성과 복조된 출력에서 직접 VCO 제어 신호를 생성하는 통합 비례-적분-미분(PID) 컨트롤러의 편의성을 고려하여 선택되었습니다.
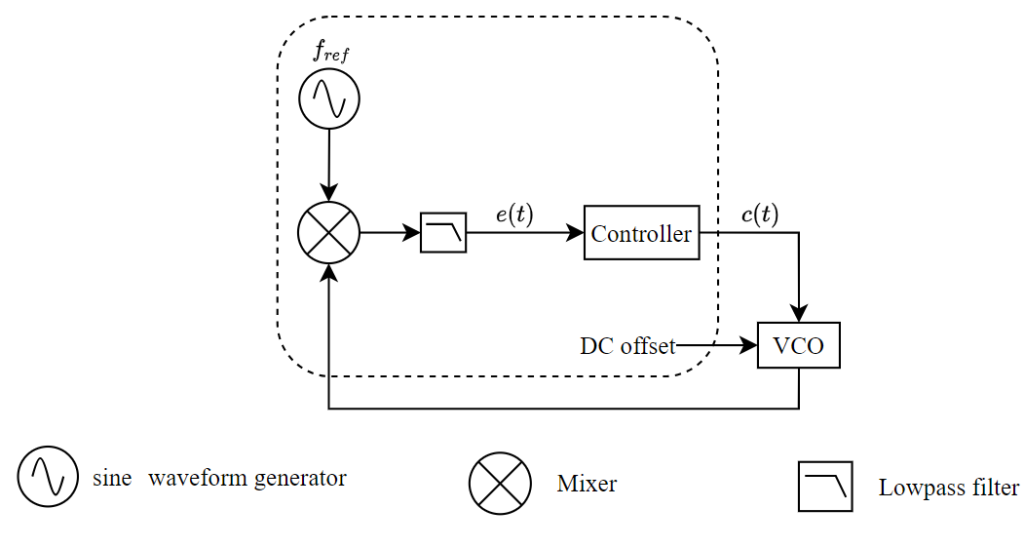
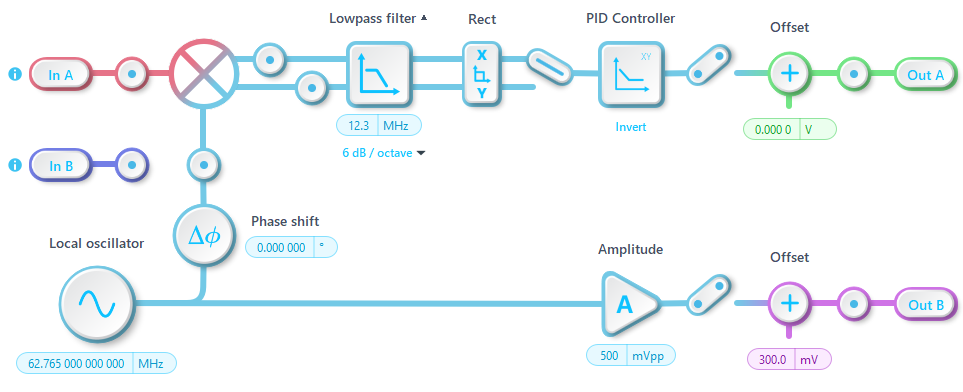
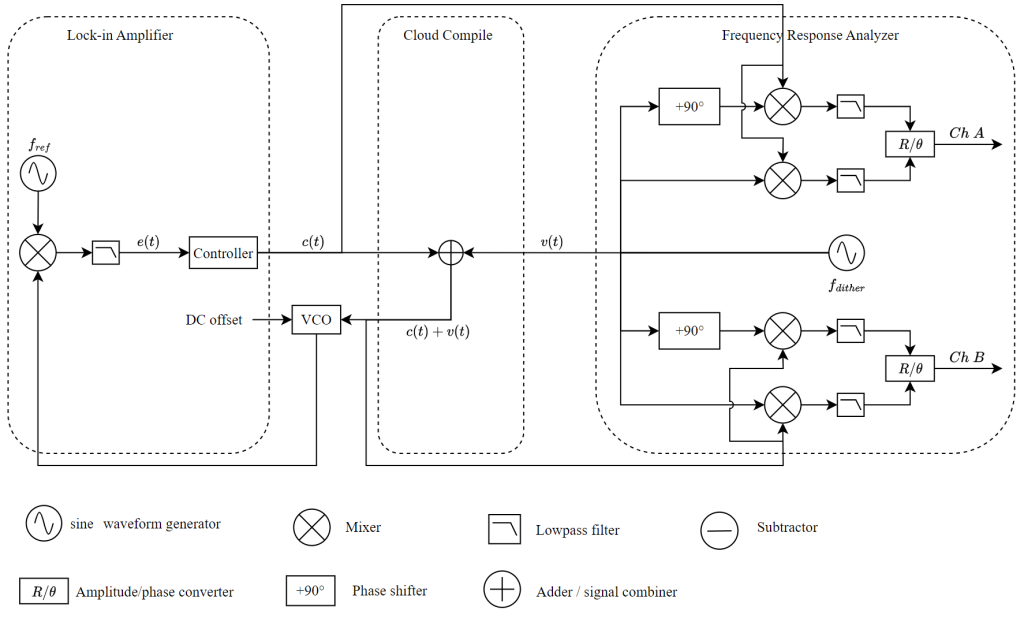
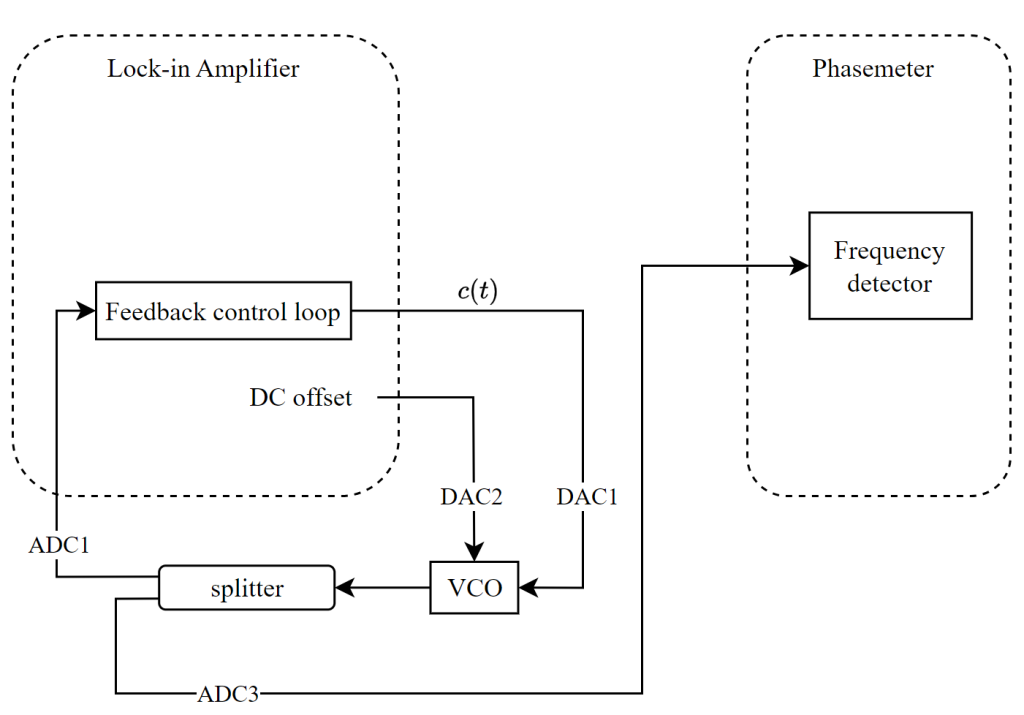
그림 1은 록인 증폭기 기반 PLL의 블록 다이어그램을 보여줍니다. 이 블록 다이어그램은 기준 사인파 발생기(국부 발진기)인 f_{ref}, 복조용 믹서, 주파수 합 성분을 제거하고 오차 신호 e(t)를 생성하는 저역 통과 필터, 그리고 주파수 안정성을 유지하기 위해 VCO의 튜닝 포트에 인가되는 피드백 제어 신호 c(t)를 생성하는 컨트롤러로 구성됩니다. 또한, VCO에 전원을 공급하기 위해 DC 오프셋이 제공됩니다.
위상 검출기
명확성과 단순성을 위해, 본 애플리케이션 노트는 고정된 조건에서 시스템을 분석하는 데 중점을 둡니다. 이 조건에서 오차 신호 e(t)는 그림 1에 나타낸 바와 같이 기준 신호와 VCO 출력 사이의 잔류 위상 차이를 나타냅니다. 이 위상 차이는 두 신호 사이의 시간 적분 주파수 편차에서 발생합니다. 시스템은 위상 오차를 0 또는 그 근처로 유지함으로써 VCO 출력 주파수가 기준 신호에 고정된 상태를 유지하도록 합니다. 오차 신호 e(t)는 수학적으로 다음과 같이 표현됩니다.
\(e(t) = A \sin{\left( \int f_{VCO}(t)dt \right)} \times \sin{ \left( \int f_{ref}dt \right) } = \frac{A}{2} \cos{\left( \int \left[f_{ref} – f_{VCO}(t) \right] dt \right)} + \frac{A}{2} \cos{\left( \int \left[f_{ref} + f_{VCO}(t) \right] dt \right)}\).
이 구성에서 VCO 공칭 주파수는 62MHz이고, 저역통과 필터의 차단 주파수는 12.3MHz입니다. 이는 이후 섹션에서 설명하겠습니다. 결과적으로, 가산 주파수 성분은 저역통과 필터에 의해 필터링되어 감산 주파수 성분만 남게 됩니다. 따라서 오차 신호는 다음과 같이 표현될 수 있습니다.
\(e(t) = \frac{A}{2} \cos{\left( \int \left[f_{ref} – f_{VCO}(t) \right] dt \right)} = \frac{A}{2} \sin{\left( \int \left[f_{ref} – f_{VCO}(t) \right] dt + 90^{\Large\circ} \right)}\)
고정된 상태에서는 \(\phi(t) \approx -90^{\Large\circ}\) 오차 신호 \(e(t)\)는 주로 잔류 잡음으로 인해 0을 중심으로 약간만 변동합니다. 테일러 전개를 사용하면 사인 파형은 다음과 같이 표현될 수 있습니다.
\(\sin{x} = x-\frac{x^3}{3!} + \frac{x^5}{5!}-\frac{x^7}{7!} + …\)
고정 상태에서 \(x\)가 0 주위에서 약간만 진동할 때, 고차 성분이 무시할 수 있기 때문에 이 지점에서 사인 파형은 양호한 선형성을 보입니다. 이를 통해 \(sin{x} \approx x\)를 근사할 수 있습니다. 따라서 \(e(t)\)의 진폭은 위상 오차를 직접적으로 나타내지만, 국부 발진기와 VCO 출력 사이에 일정한 90° 위상 오프셋이 존재합니다.
더욱이, 위상 검출기의 이득은 진폭에 따라 달라지며 VCO 신호의 크기에 따라 달라집니다. 제어 시스템의 성능을 평가할 때 이러한 종속성을 고려해야 합니다. 결과적으로, 오차 신호는 다음 식으로 근사할 수 있습니다.
\(e(t) \약 \frac{A}{2} \시간 \왼쪽( \phi(t) + 90^{\Large\circ} \오른쪽) \)
여기서 \(A\)는 VCO 신호의 진폭을 나타내고 \(\phi(t) \)는 순간 위상 편차를 나타냅니다.
Lock-in Amplifier 구성
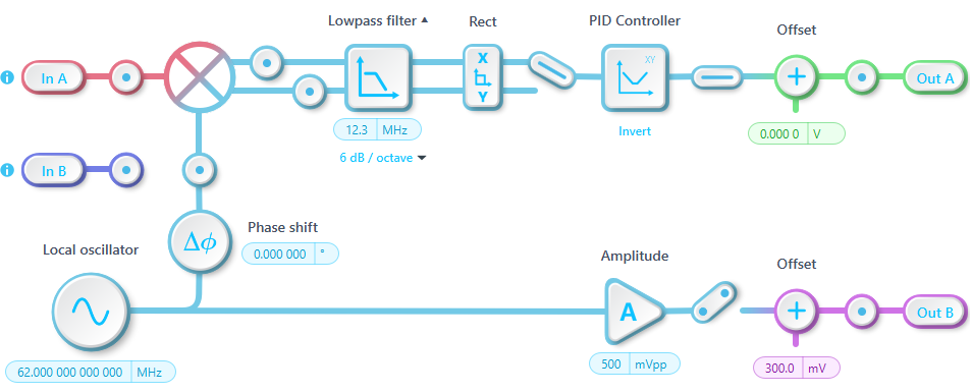
그림 1에 표시된 PLL 블록 다이어그램에 따라 Lock-in Amplifier 구성은 그림 2에 설명되어 있습니다. VCO 출력 신호는 다음에 공급됩니다. 인에이로컬 발진기는 공칭 VCO 주파수인 62MHz로 설정됩니다. 저역 통과 필터 차단 주파수는 최대값인 12.3MHz로 설정됩니다. 이 설정은 주파수 합 성분을 효과적으로 억제하고 피드백 루프 내에서 필터에 의해 발생하는 위상 지연을 줄임으로써 제어 대역폭을 최대화합니다. VCO 주파수 조정을 위한 제어 신호는 다음을 통해 출력됩니다. 아웃에이글렌데일 아웃비 VCO에 전원을 공급하기 위해 안정적인 300mV DC 전압을 제공합니다.
특히, 오류 신호 \(e(t)\)는 다음에 할당됩니다. X 채널은 동위상 성분을 오차 신호로 사용합니다. 이로 인해 고정된 VCO 출력은 국부 발진기와 비교하여 90° 위상 차이를 보입니다. 이 위상 오프셋은 오차 신호를 다음 채널로 라우팅하여 제거할 수 있습니다. Y 채널은 대신 직교 성분을 사용합니다. 그러나 이 애플리케이션 노트의 목적상 위상 오프셋은 허용 가능하므로 PLL은 계속해서 다음을 사용합니다. X 채널 출력을 오류 신호로 사용합니다.
PI 컨트롤러를 사용한 초기 잠금
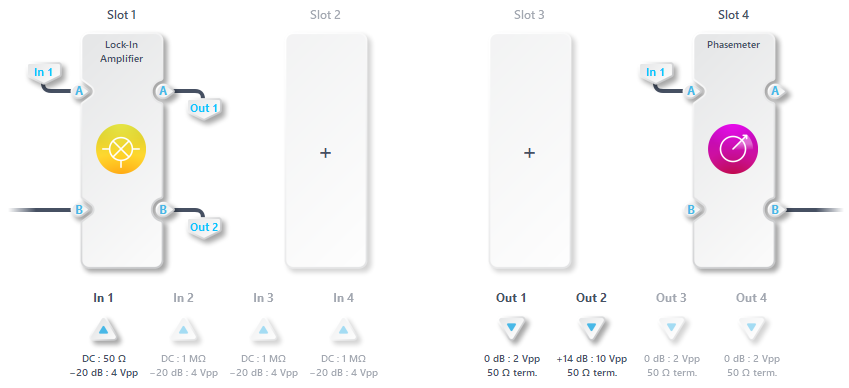
실험적인 다중 계측기 모드 설정은 그림 3에 나와 있습니다. 여기서 슬롯 4에 할당된 위상계는 VCO 주파수를 지속적으로 모니터링합니다. 이 측정값은 VCO의 초기 주파수를 정확하게 추정하여 록인 앰프의 국부 발진기 주파수를 적절하게 설정할 수 있도록 합니다. 이 방법은 일반적으로 보조 주파수 수집(assisted frequency acquisition)이라고 합니다. 대안으로, Moku 스펙트럼 분석기를 사용하여 스펙트럼 피크를 찾아 VCO 출력 주파수를 식별할 수도 있습니다.
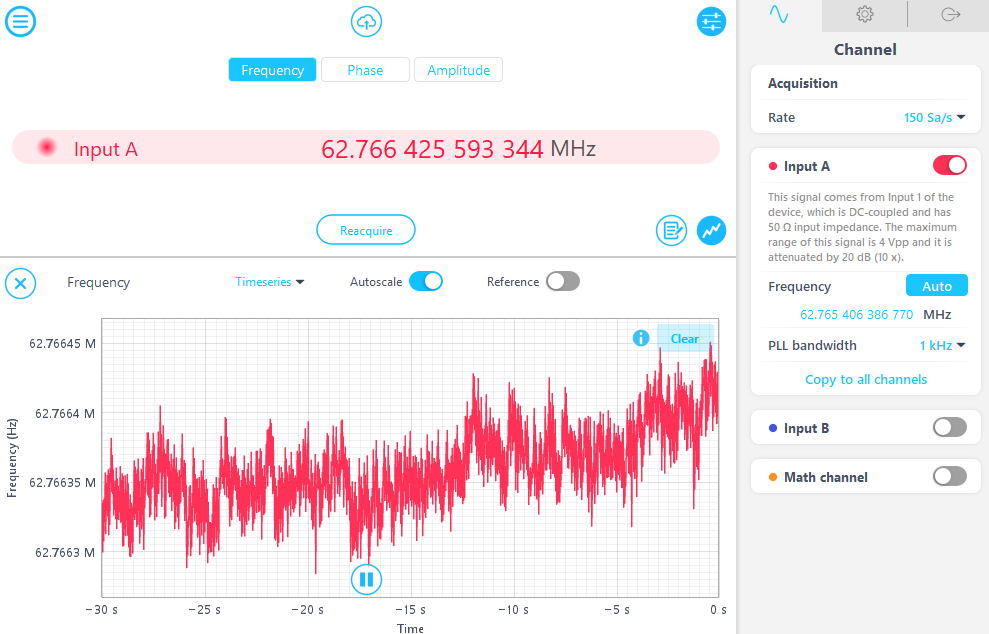
자유 실행 VCO 주파수는 다음을 사용하여 측정됩니다. 위상 계측기주파수는 자동 모드로 설정했습니다. 자동으로 획득된 초기 주파수는 62.7654MHz입니다. 록인 앰프의 내부 기준 주파수는 VCO의 초기 주파수와 일치하도록 조정되어 안정적인 초기 록킹을 보장합니다. 이 측정값을 기반으로 그림 5와 같이 국부 발진기를 62.765MHz로 설정합니다.
초기 잠금을 위해, 피드백 루프가 작동할 수 있도록 대략적인 추정과 경험적 경험을 바탕으로 비례-적분(PI) 제어기를 구성합니다. 이 단계에서 PI 제어기는 최적화되지 않습니다. 특히 루프에 두 개의 순수 적분기가 포함되어 있다는 점을 고려하면 더욱 그렇습니다. 하나는 PI 제어기 자체에서, 다른 하나는 VCO의 주파수-위상 관계에서 생성됩니다. 이러한 구성은 루프 내에서 누적 180도 위상 편이를 발생시켜 시스템이 폐쇄 루프 불안정성에 취약해질 수 있습니다.
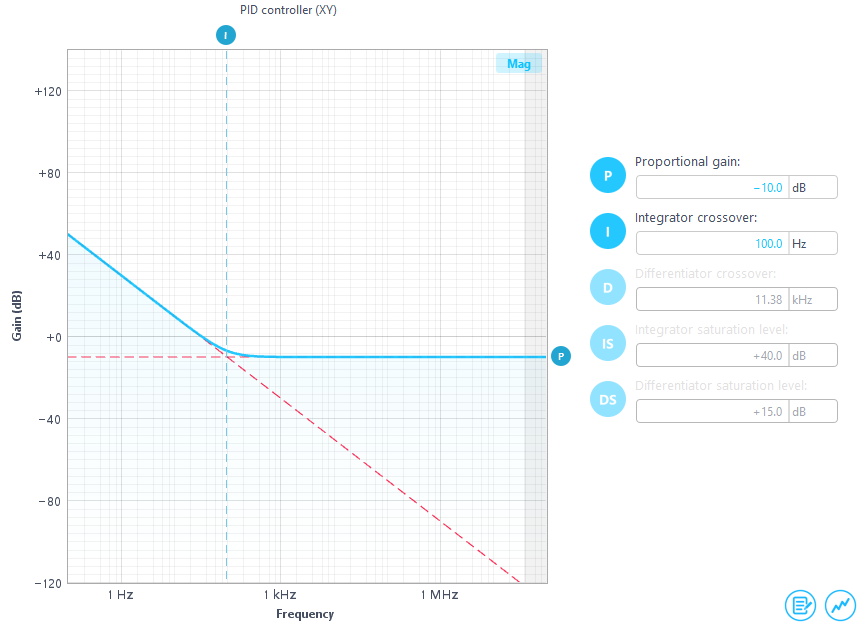
PI 제어기 매개변수는 그림 6에 표시되어 있습니다. 비례 이득은 -10dB로 설정되었고, 적분기 교차 주파수는 100Hz로 설정되었습니다. 결과적으로 제어기는 제한된 대역폭으로 동작합니다. 위상 편차에 대한 응답이 느리고, 낮은 개방 루프 이득만 제공하여 VCO 주파수 잡음 억제 효과가 제한적입니다.
PI 컨트롤러를 작동시킨 후, 위상계에서 측정된 주파수는 그림 7에 나와 있습니다. 동기화 전에는 신호가 일정한 주파수 오프셋과 큰 주파수 변동을 보입니다. PI 컨트롤러가 활성화되면 주파수는 62.765MHz로 동기화되며, 선택된 수직 스케일에서 변동은 무시할 수 있습니다. 이는 폐루프 피드백 안정화의 효과를 보여줍니다.
VCO의 잔여 주파수 잡음은 그림 8과 같이 주파수 데이터를 지속적으로 기록하는 Phasemeter를 사용하여 측정합니다. PI 컨트롤러와 동기화된 VCO는 자유 실행 VCO에 비해 시간 영역에서 주파수 변화가 감소했습니다. 피크 간 주파수 잡음은 자유 실행 시 ±800Hz에서 동기화 후 ±100Hz로 감소했습니다.
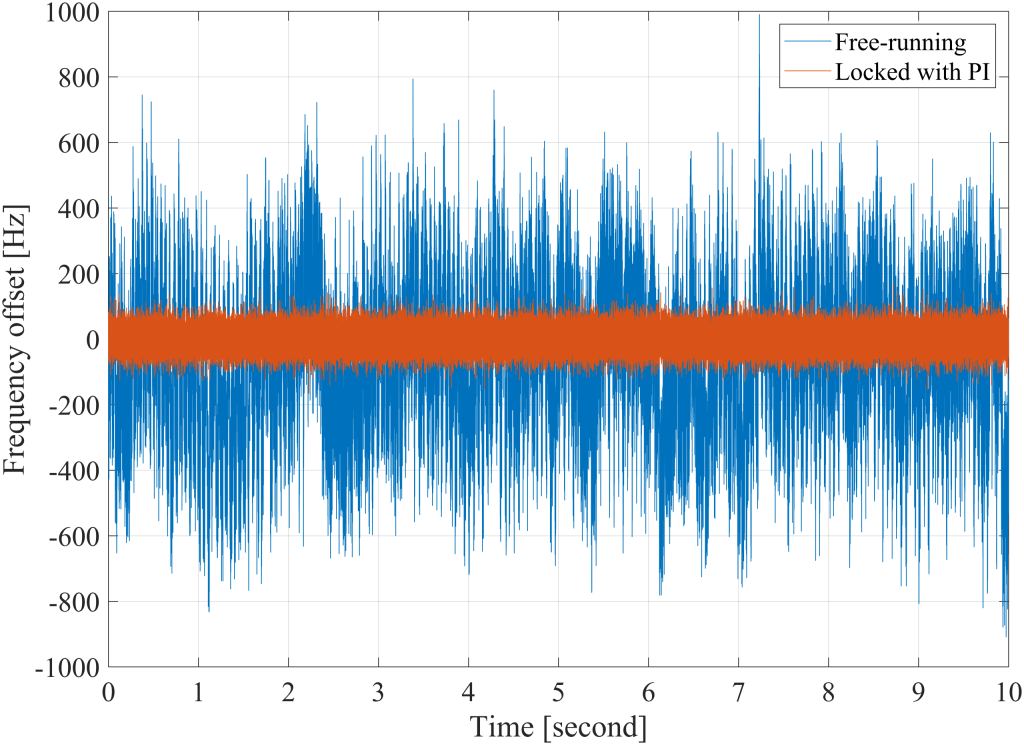
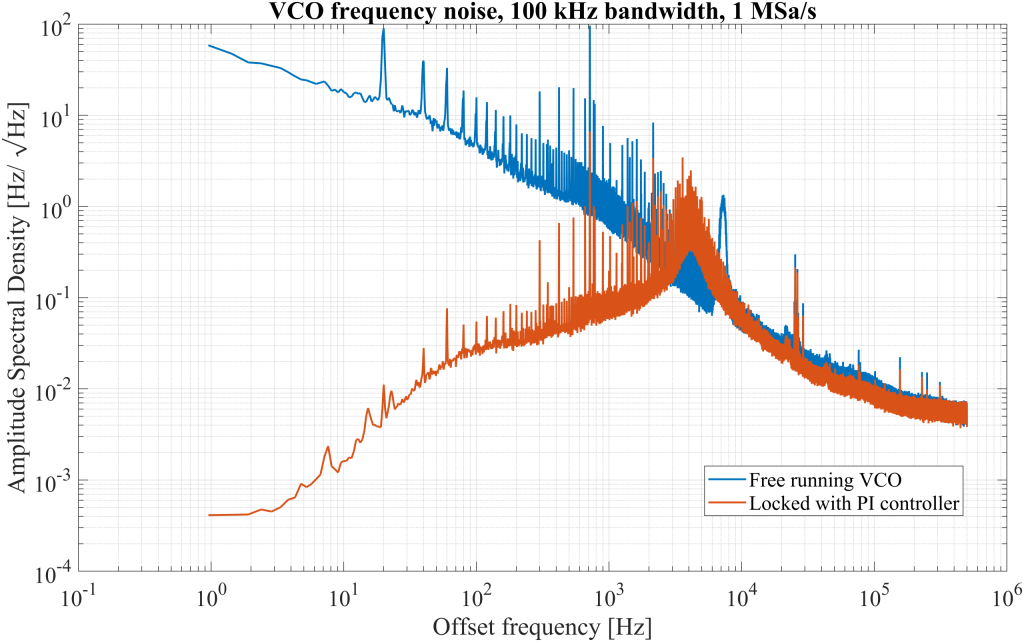
그림 9는 자유 동작 VCO와 PI-동기 VCO의 주파수 잡음의 진폭 스펙트럼 밀도(ASD)를 보여줍니다. 자유 동작 VCO의 경우, 20Hz 및 그 고조파에서 작은 스펙트럼 톤이 관찰되는데, 이는 전력망과 관련된 저조파 간섭에서 기인한 것으로 추정됩니다.
PI-locked ASD에서 4kHz 오프셋 주파수 근처에 뚜렷한 노이즈 피크가 나타납니다. 이상적으로 제어 루프는 추가적인 노이즈 성분을 생성하지 않고 대역폭 전체에 걸쳐 위상 및 주파수 노이즈를 억제해야 합니다.
이 피크의 존재는 루프의 위상 마진이 부족함을 시사합니다. 위상 마진이 너무 작으면 루프 이득과 위상 응답이 단위 이득 교차 주파수 근처에서 공진 현상을 일으켜 잡음을 감쇠시키는 대신 증폭시킬 수 있습니다. 잡음 피킹이라고 하는 이러한 효과는 루프 동역학 조정이 필요할 수 있음을 나타냅니다. 이 문제는 다음 섹션의 OLTF 분석에서 자세히 살펴보며, 이 글의 다른 부분에서도 유사한 주제를 다룹니다. 애플리케이션 노트.
개방 루프 전달 함수 측정
VCO 피드백 시스템의 안정성과 성능을 최적화하려면 주파수 영역 동작에 대한 심층적인 이해가 필요합니다. OLTF(온라인 선형 함수)는 시스템 이득, 위상 여유, 그리고 전반적인 안정성에 대한 통찰력을 제공하기 때문에 이 분석에서 중요한 도구입니다. 이러한 특성은 컨트롤러의 비례, 적분, 그리고 미분 성분을 어떻게 조정해야 하는지에 직접적인 영향을 미칩니다. 이 섹션에서는 먼저 OLTF와 이를 구하는 방법을 소개하고, OLTF가 시스템 최적화에 어떻게 적용되는지 살펴봅니다.
루프 모델
피드백 루프의 단순화된 모델이 그림 10에 나와 있습니다. 이 모델에서 위상 검출기는 감산기로 표현되며, 이는 고정된 조건에서의 기능을 반영합니다. 즉, 기준 신호와 VCO 출력 사이의 위상차를 출력합니다. 앞서 설명한 바와 같이, 복조 과정은 이러한 위상 오차를 발생시킵니다. 고정된 조건에서 오차 신호는 다음과 같은 형태를 갖습니다.
\(e(t) = \phi_{참조} – \phi_{출력} \)
이는 컨트롤러에 대한 입력으로 사용됩니다. 이러한 기반을 바탕으로 OLTF(Only Out of Task Force)를 도출하고 측정하여 시스템 안정성을 평가하고 체계적인 매개변수 조정을 안내할 수 있습니다.
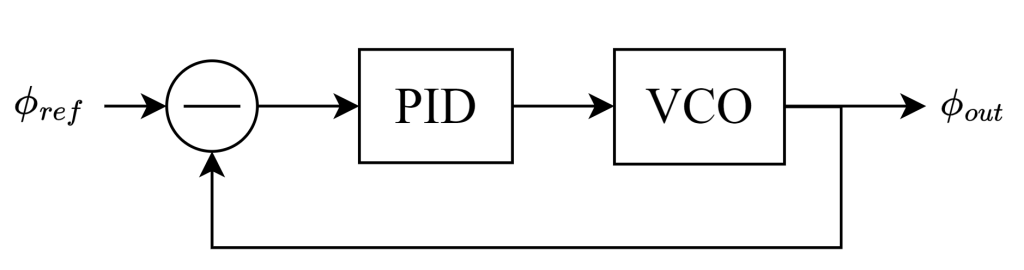
라플라스 영역에서 피드백 루프는 다음 방정식으로 모델링할 수 있습니다. 여기서 \(\text{PID}(s)\)와 \(\text{VCO}(s)\)는 각각 PID 제어기와 VCO의 전달 함수를 나타냅니다. 단순화를 위해 위상 검출기(감산기)의 이득은 1이라고 가정합니다. 실험에서는 시스템 모델링 과정에서 위상 검출기 이득을 인식하고 보상하는 과정이 필요합니다.
\(\left(\phi_{ref} – \phi_{out}\right) = \text{PID}(초) \times \text{VCO}(초) = \phi_{out}\)
루프를 재배열하면 폐쇄 루프 전달 함수(CLTF) \(H(s)\)는 다음과 같습니다.
\(H(s) = \frac{\phi_{out}}{\phi_{ref}} = \frac{\text{PID}(s) \times \text{VCO}(s)}{1 + \text{PID}(s) \times \text{VCO}(s)} = \frac{G(s)}{1+G(s)}\)
여기서 \(G(s) = \text{PID}(s) \times \text{VCO}(s)\)는 OLTF(온라인 전달 함수)입니다. \(G(s)\)는 폐루프 시스템의 동작을 결정하는 데 핵심적인 역할을 합니다. \(G(s)\)는 폐루프 전달 함수 \(H(s)\)의 분자와 분모 모두에 나타나므로, 그 특성은 시스템 안정성에 직접적인 영향을 미칩니다. 특히 중요한 것은 \(G(s)=-1\)인 조건입니다. 이 경우 \(H(s)\)의 분모가 0에 가까워져 무한 이득과 불안정성이 발생합니다. 피드백 시스템 설계 시 이러한 중요한 점을 신중하게 피해야 합니다.
시스템이 이 불안정성 임계값에 얼마나 근접했는지 평가하기 위해 이득 마진 및 위상 마진과 같은 주파수 영역 안정성 지표가 사용됩니다. 이 섹션에서는 제어 루프의 견고성을 판단하고 제어기 매개변수의 추가 조정을 안내하기 위해 이러한 마진을 평가하는 데 중점을 둡니다.
OLTF \(G(s)\) 특성 분석의 첫 번째 단계는 VCO의 전달 함수를 결정하는 것입니다. 이는 VCO의 튜닝 포트에 스윕 주파수 디더링 신호를 주입하고 이에 따른 VCO 출력의 주파수 변화를 분석함으로써 달성됩니다.
그림 11은 VCO의 전달 함수를 특성화하는 데 사용된 설정을 보여줍니다. 이 구성에서는 진동수 응답 분석기 저진폭 스윕 주파수 디더링 신호를 생성하여 출력합니다. 아웃에이 VCO의 주파수 튜닝 포트에 적용됩니다. 이 신호가 VCO를 자극하는 동안, 주파수 응답 분석기는 크기 및 위상 응답 측정을 동시에 수행합니다.
VCO의 순간 출력 주파수는 위상계(Phasemeter)로 측정되고, 10 µV/Hz의 주파수-전압 스케일링 계수를 사용하여 전압 신호로 변환된 후 주파수 응답 분석기(Frequency Response Analyzer)로 다시 입력됩니다. 이러한 구성을 통해 VCO의 전달 함수를 자동으로 정확하게 계산할 수 있습니다.
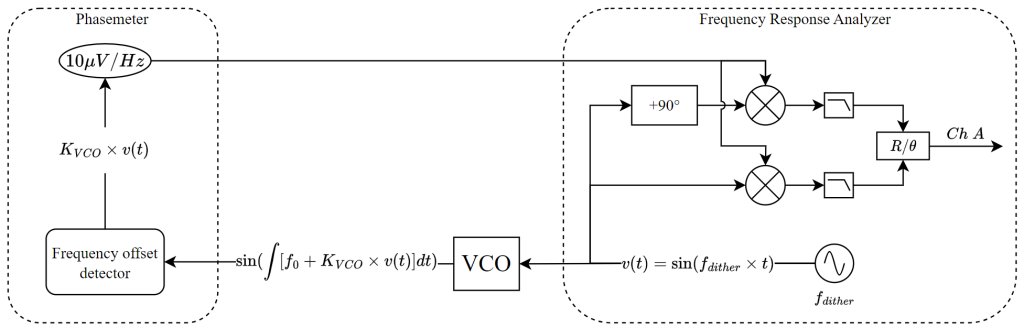
그림 12는 전달 함수 측정에 사용되는 Moku:Pro 다중 계측기 모드 구성을 보여줍니다. VCO 출력은 다음에 연결됩니다. 인에이 VCO의 주파수를 지속적으로 모니터링하는 Phasemeter의 주파수 데이터는 내부 신호 버스를 통해 전송됩니다. 인에이 주파수 응답 분석기의.
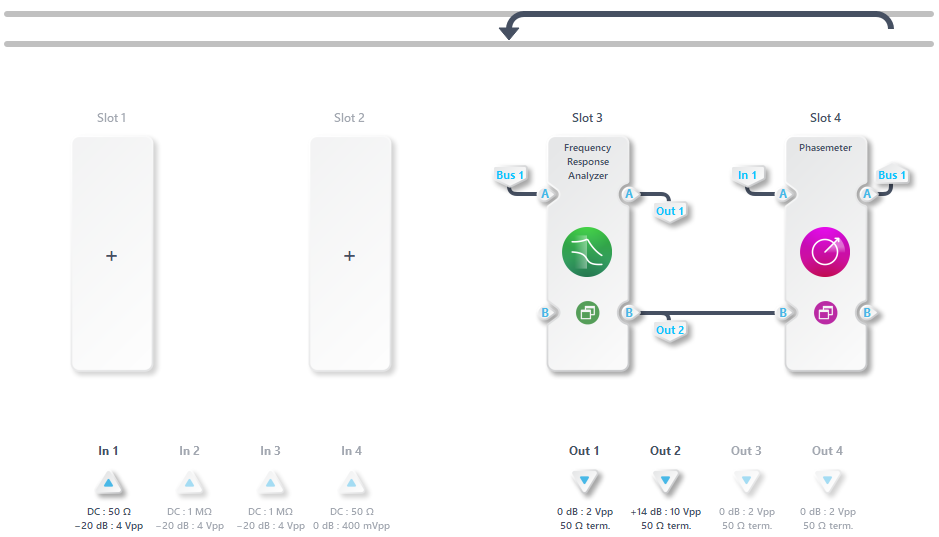
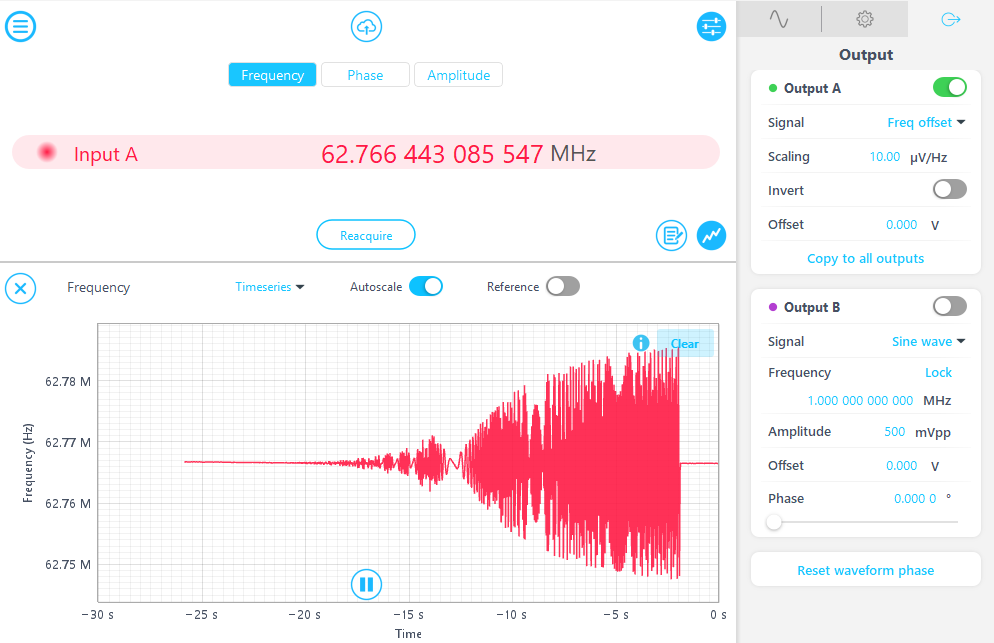
그림 13은 측정된 시간 영역 주파수 트레이스를 표시하는 Phasemeter 사용자 인터페이스를 보여줍니다. 주파수 오프셋은 전달 함수 측정을 위해 주파수 응답 분석기로 전송됩니다. 표시된 데이터에서 VCO 주파수 편차가 시간이 지남에 따라 증가하는 것을 확인할 수 있습니다. 주파수 응답 분석기의 디더링 출력 진폭은 디더링 신호 주파수를 스위핑하는 동안 일정하게 유지된다는 점에 유의해야 합니다. 이는 VCO가 디더링 신호가 느리게 변할 때만 디더링 신호를 효과적으로 따라갈 수 있음을 나타냅니다. 따라서 저역 통과 응답으로 모델링할 수 있습니다.
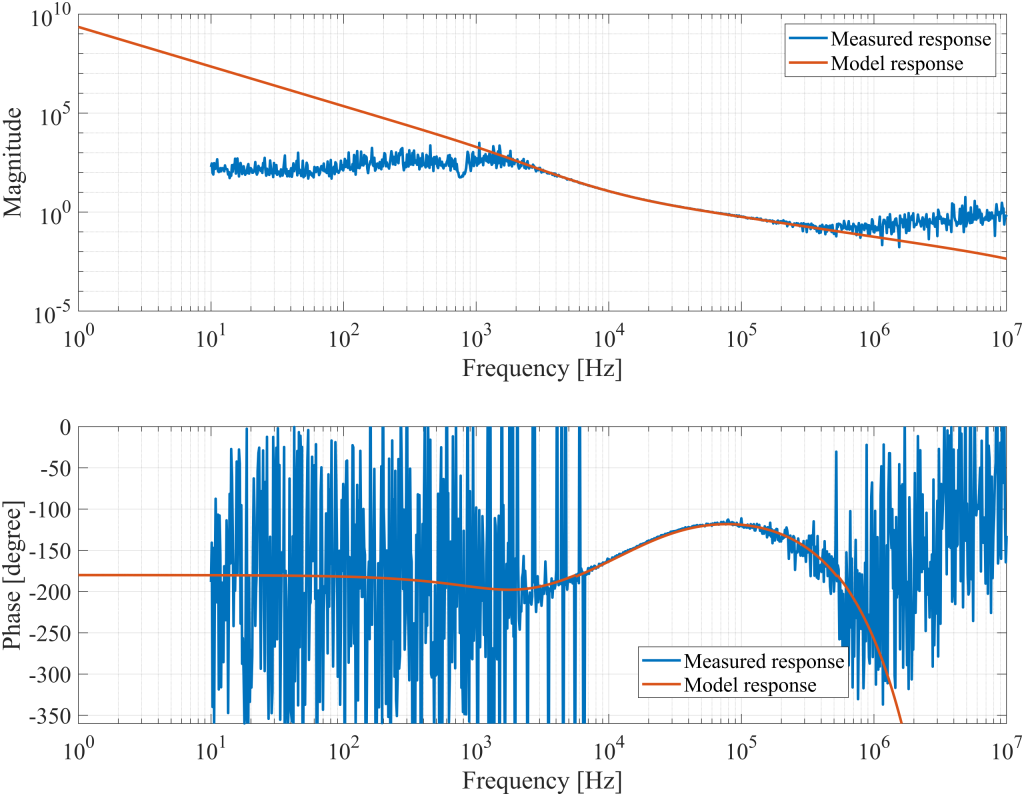
주파수 오프셋은 주파수 응답 분석기(Frequency Response Analyzer)를 통해 처리됩니다. 주파수 응답 분석기는 다양한 디더링 주파수 범위에서 신호의 크기와 위상을 측정합니다. 측정된 VCO 응답은 그림 14에 나와 있습니다. 저역 통과 코너 주파수는 9.538kHz로 추정되며, VCO 이득은 약 83,497Hz/V입니다.
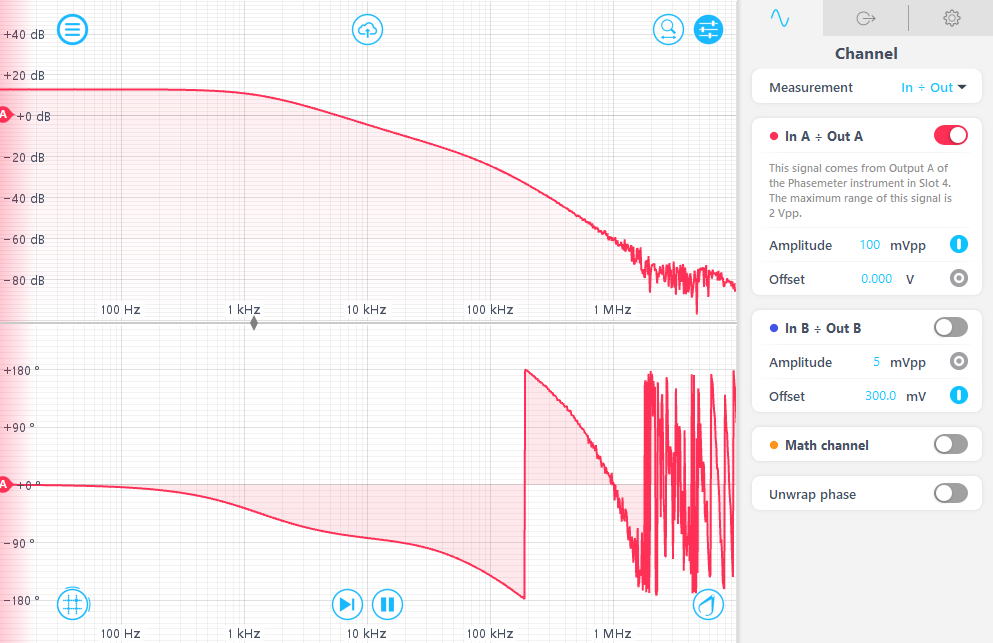
그림 15에 제시된 VCO 주파수 응답은 주파수 응답 분석기(Frequency Response Analyzer)를 사용하여 측정된 주파수 응답을 위상계(Phasemeter)의 주파수-전압 변환 계수를 사용하여 정규화하여 도출했습니다. 응답은 두 개의 극점을 나타내는 것처럼 보이지만, 두 번째 극점은 위상계(Phasemeter)의 제한된 추적 대역폭에서 발생하므로 무시할 수 있습니다. VCO 응답과 컨트롤러의 응답을 결합하여 OLTF(On-Off Transition Function)를 결정할 수 있습니다. 록인 앰프(Lock-in Amplifier) 내의 저역 통과 필터는 코너 주파수인 12.3MHz가 관심 주파수 범위를 훨씬 벗어나 저주파 영역에서 OLTF에 큰 영향을 미치지 않으므로 이 분석에서 제외했습니다.
MATLAB에서 시스템을 모델링하기 위해 OLTF는 다음과 같이 구성될 수 있습니다. PI 제어기 모델은 이전 절에서 설명한 s 도메인 표현을 기반으로 합니다. 제어 시리즈 응용 노트.

시스템 매개변수는 다음과 같이 구성됩니다. \(f_{VCO} = \text{9.538 kHz}\), \(G_{VCO} = \text{83,497 Hz/volt}\), \(P_{dB} = \text{-10 dB}\), \(I_{cross} = \text{100 Hz}\). Lock-in Amplifier에서 검출된 오류 신호가 위상으로 표현되므로 OLTF에 주파수-위상 변환을 나타내는 VCO 적분기가 포함된다는 점에 유의하는 것이 중요합니다. 또한 450ns 지연은 Moku:Pro에서 Lock-in Amplifier 처리 지연과 입력-출력 지연을 설명합니다. 모델이 확립되면 다음 단계에서는 실제 OLTF를 측정하고 모델링된 응답과 비교하여 정확도를 검증합니다.
루프 측정
제어 이론 시리즈에서 이전에 발표된 애플리케이션 노트를 참조하면, \(G(s)\)를 측정하기 위한 블록 다이어그램이 그림 16에 나와 있습니다. 이 설정에서 디더링 신호는 PID 컨트롤러와 VCO 사이의 지점에 주입됩니다.
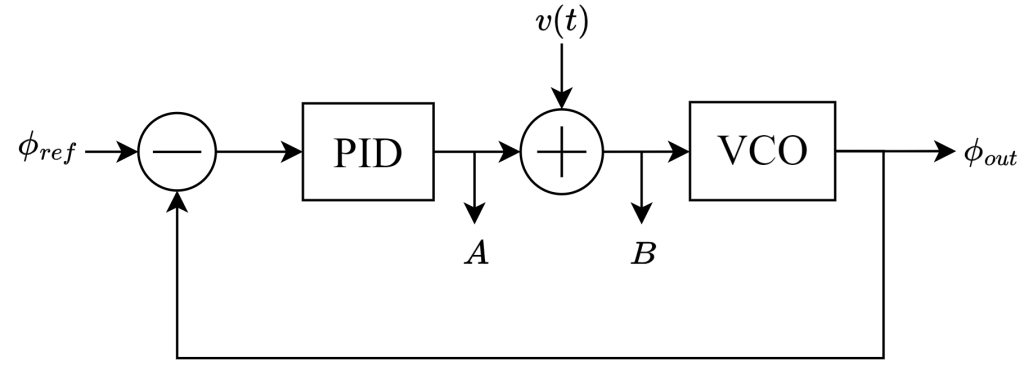
지점에서의 전달 함수 A 및 B 피드백 루프 내의 위상은 외부에서 주입된 디더링 신호에 대한 시스템의 응답으로부터 도출될 수 있습니다. 이 측정 동안 기준 위상 \(\phi_{ref}\)은 0으로 설정되며, 이는 위상 검출기가 루프에 음의 부호만 부여함을 의미합니다.
시점에서 A, 전달 함수는 다음과 같이 표현될 수 있습니다.
\(\left( A(s) + V(s) \right) \times \text{VCO}(s) \times -1 \times \text{PID}(s) = A(s)\)
여기서 \(V(s)\)는 주입된 디더링 신호 \(v(t)\)의 라플라스 변환입니다.
이 표현식을 재배열하면 주입된 신호에서 출력 지점까지의 전달 함수가 생성됩니다. A:
\(\frac{A(s)}{V(s)} = \frac{-1 \times \text{VCO}(s) \times \text{PID}(s)}{1 + \text{VCO}(s) \times \text{PID}(s)} = \frac{-G(s)}{1+G(s)}\)
이 표현은 높은 루프 이득 \(G(s) \gg 1\)에서 지점의 출력이 A 입력의 음수, 즉 \(\frac{A(s)}{V(s)} \approx -1\)을 면밀히 추적하며 이는 음수 참조 추적에 해당합니다.
시점에서 B, 관계는 다음과 같이 쓸 수 있습니다.
\(B(s) \times \text{VCO}(s) \times -1 \times \text{PID}(s) + V(s) = B(s)\)
전달 함수를 풀면 다음과 같습니다.
\(\frac{B(s)}{V(s)} = \frac{1}{1 + \text{VCO}(s) \times \text{PID}(s)} = \frac{1}{1+G(s)}\)
이는 \(G(s)\)가 클 때 지점의 신호가 B 상당히 감쇠됩니다. 결과적으로, 지점에서의 전달 함수는 B 교란 제거를 특징으로 하며, 해당 지점에서 디더링 신호 V(s)를 효과적으로 억제합니다.
전달 함수의 비율을 지점에서 취함으로써 A 및 BOLTF \(G(s)\)는 다음과 같이 복구될 수 있습니다.
\(\frac{A(s)}{B(s)} = -G(s)\)
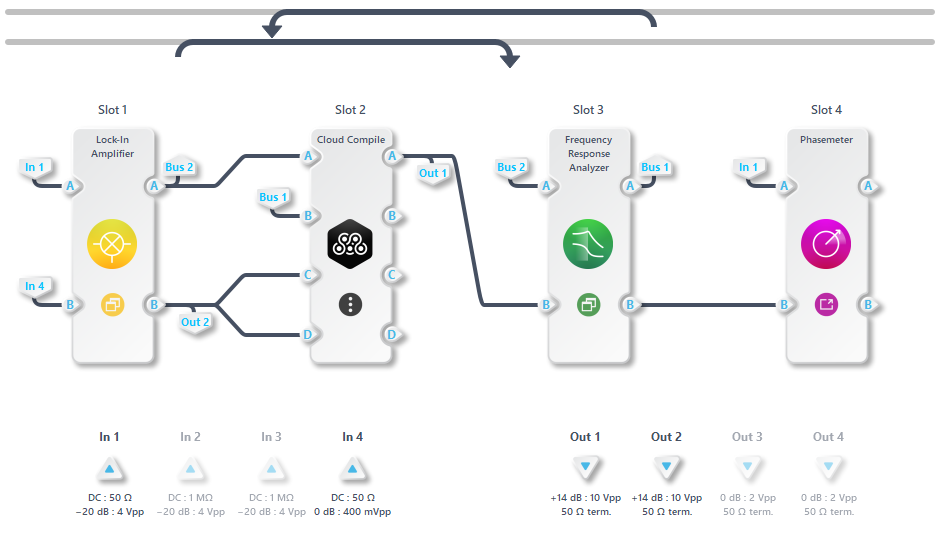
그림 17에 나와 있는 실험 설정은 이 개념을 구현합니다. 디더링 신호 \(v(t)\)는 다음을 통해 VCO 피드백 루프에 주입됩니다. Moku 클라우드 컴파일 간단한 가산기로 구성되었습니다. 주입 전 제어 신호 \(c(t)\)와 주입 후 결합 신호 \(c(t)+v(t)\)는 주파수 응답 분석기의 두 채널을 사용하여 동시에 측정됩니다. 이를 통해 시스템은 지점에서 전달 함수를 포착할 수 있습니다. A 및 B 분석을 위해.
다중 계측기 모드 구성은 그림 18에 나와 있으며 그림 17에 나와 있는 블록 다이어그램에 해당합니다. 슬롯 4의 위상계는 모니터링 목적으로만 사용되며 피드백 제어 루프에는 참여하지 않는다는 점에 유의하는 것이 중요합니다.
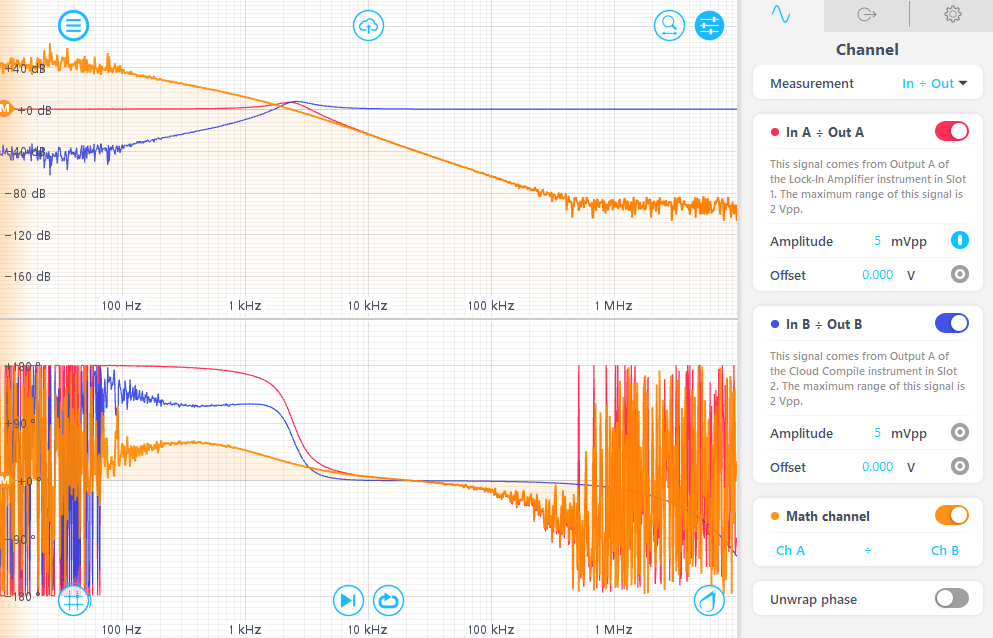
주파수 응답 분석기(Frequency Response Analyzer) 사용자 인터페이스는 그림 19에 나와 있습니다. 이 설정에서 채널 A(빨간색 선)는 디더링 신호 \(v(t)\)에서 제어 신호 \(c(t)\)로의 전달 함수를 나타냅니다. 채널 B(파란색 선)는 VCO로의 튜닝 입력을 나타내는 결합 신호 \(c(t)+v(t)\)를 나타냅니다. OLTF(Only Out Transfer Function)는 채널 A의 크기를 나누고 채널 B의 위상을 빼서 얻습니다. 결과 OLTF는 수학 채널(주황색 선)에 표시됩니다.
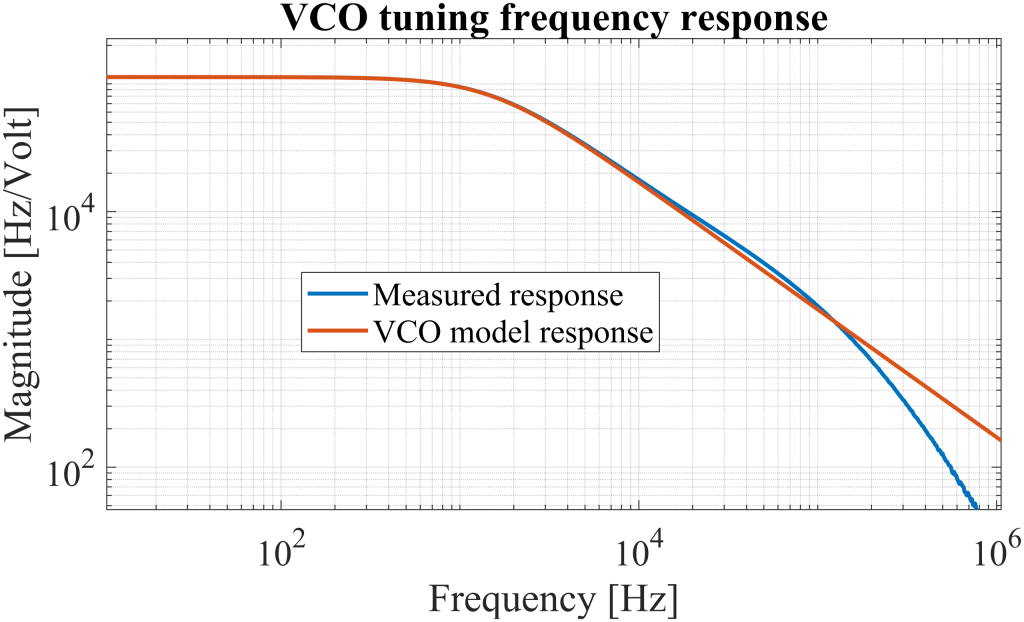
이전 섹션에서 개발한 OLTF 모델을 MATLAB에서 시뮬레이션하고, 그림 20과 같이 주파수 응답 분석기에서 얻은 측정 응답과 비교합니다. 시뮬레이션 결과는 크기와 위상 모두 측정 데이터와 매우 일치합니다. 부궤환 구성으로 인한 고유 위상 반전을 고려하여 측정된 위상 응답에서 180°를 더 뺍니다.
측정은 단위 이득 주파수 근처에서 가장 정확합니다. 더 높은 주파수에서는 제어 루프가 해당 지점에서 주입된 디더링 신호를 추적하기에 충분한 대역폭이 부족합니다. A (그림 16)으로 인해 측정 정확도가 감소합니다. 스펙트럼의 반대쪽 끝에서는 매우 낮은 주파수가 루프에 의해 강하게 억제되어 지점에서 디더링 신호 \(v(t)\)의 최소 잔여만 남습니다. B (그림 16) 이로 인해 저주파와 고주파 영역 모두에서 측정의 유용성이 제한됩니다.
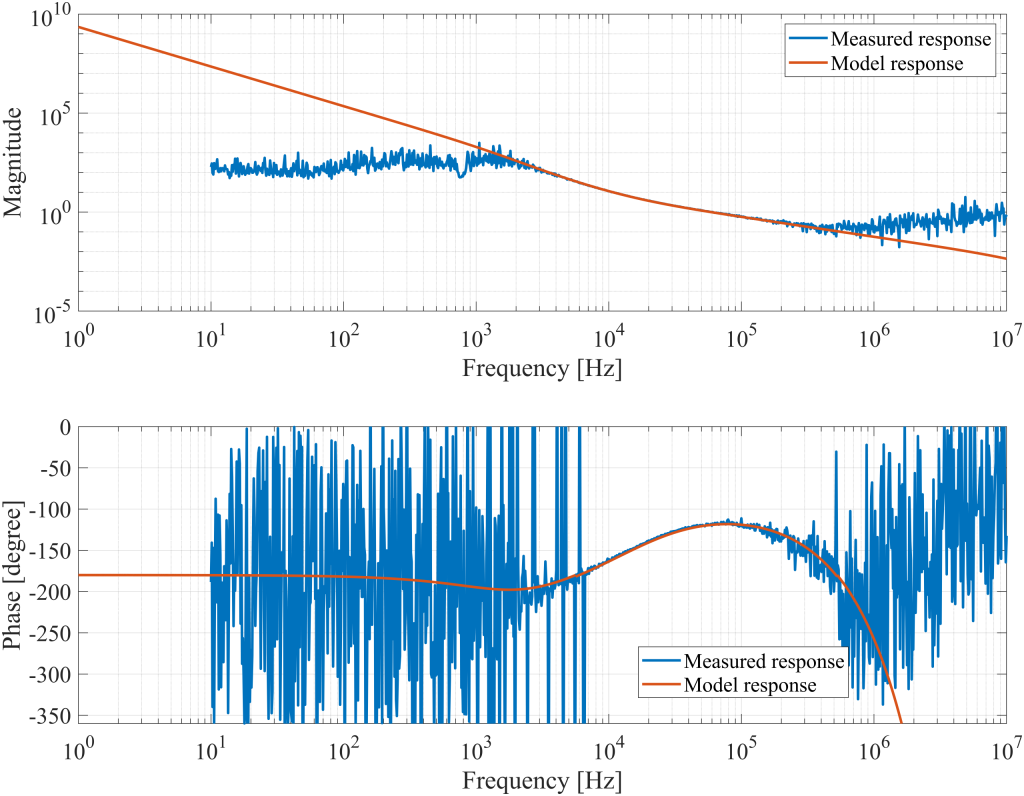
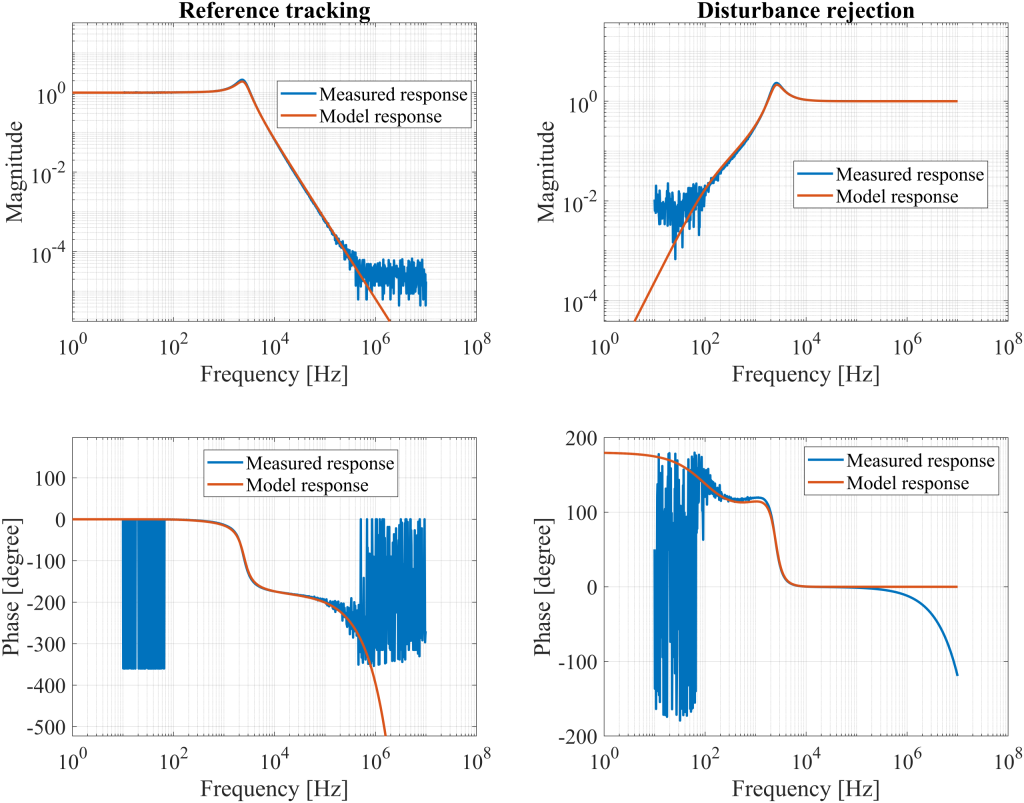
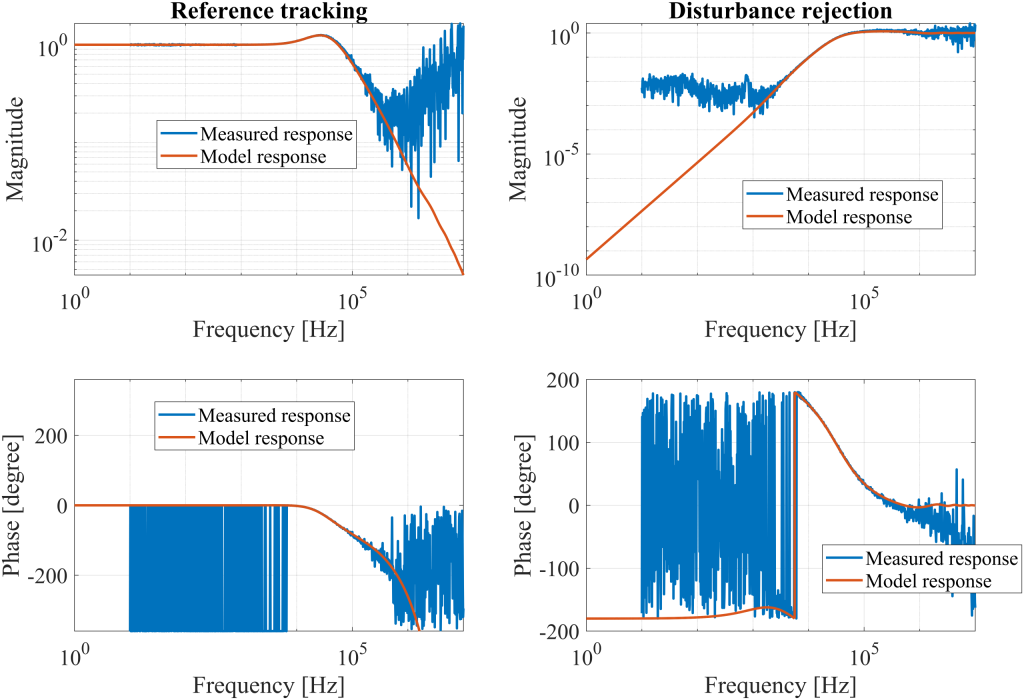
그림 20에 표시된 OLTF 외에도 참조 추적 및 교란 제거 응답도 생성되어 그림 21에 표시됩니다. 측정된 참조 추적에서 위상 응답은 측정된 응답이 일반적인 \(\frac{G(s)}{1+G(s)}\) 형태가 아닌 \(\frac{-G(s)}{1+G(s)}\)이기 때문에 180°만큼 이동합니다.
교란 제거 응답에서 이득 피크가 3kHz 부근에서 나타나는데, 이는 그림 9에 표시된 잠금 후 측정된 주파수 잡음에서 관찰된 잡음 피크와 일치합니다. 이 이득 피크는 현재 OLTF의 작은 위상 마진으로 인해 발생하며, 잡음이 감소하는 대신 증가합니다.
루프 최적화
OLTF(온라인 동기 전달 함수)를 측정하고 시스템을 모델링하는 주된 목적은 잠금 루프의 성능을 최적화하는 것입니다. 이전 응용 노트에서 논의했듯이, OLTF에서 도출된 핵심 지표인 루프 이득, 위상 마진, 이득 마진은 피드백 시스템의 평가 및 개선에 매우 중요합니다. 효과적인 제어 시스템은 저주파 이득을 극대화하여 외란을 억제하는 동시에 충분한 위상 마진과 이득 마진을 유지하여 잡음 및 매개변수 변화에 대한 안정성과 강건성을 보장해야 합니다.
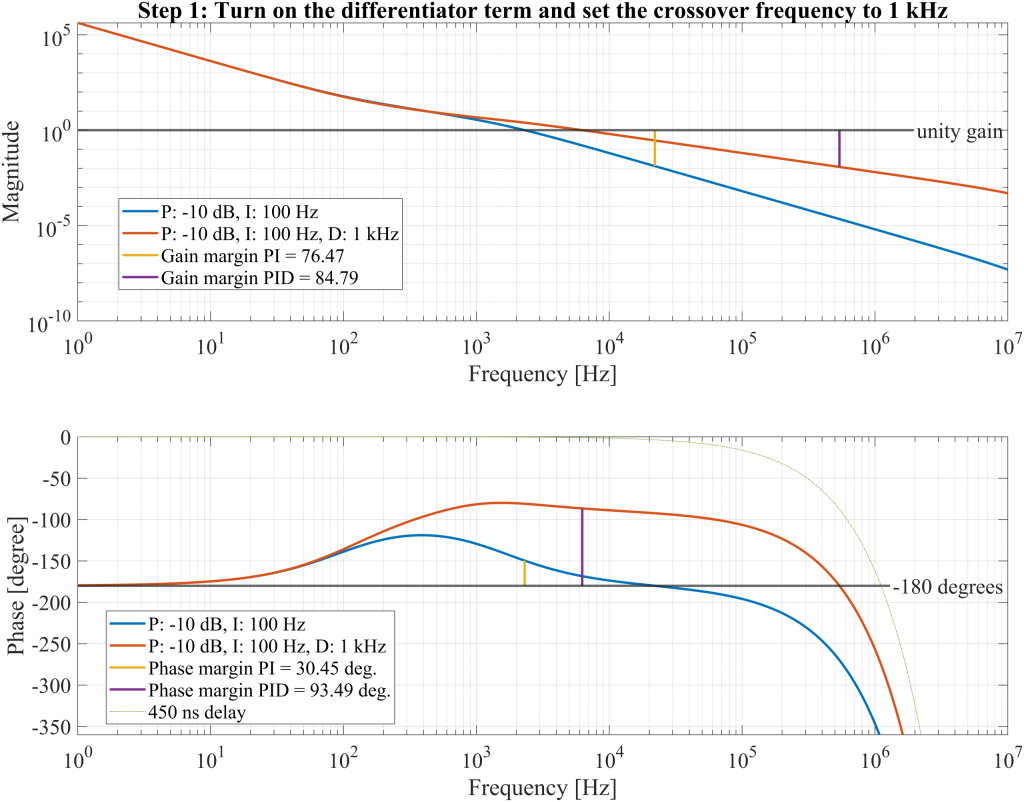
1kHz 미분기항을 추가합니다.
그림 20의 OLTF 플롯에서 볼 수 있듯이, PI 제어 피드백 루프는 단위 이득 주파수 근처에 세 개의 기여 극점을 가지고 있습니다. 이는 주파수-위상 변환을 수행하는 VCO의 고유 적분기, 1차 저역 통과 응답, 그리고 PI 제어기의 적분기 구성 요소에서 발생합니다. 이 세 극점은 합쳐서 총 270°의 위상 편이를 발생시키며, 이는 적절하게 관리되지 않을 경우 불안정성의 위험을 초래합니다.
단위 이득 주파수는 PI 적분기의 100Hz 교차점과 VCO 저역통과 필터의 9.538kHz 코너 주파수 사이에 위치합니다. 이 중간 영역에서 PI 적분기의 효과는 감소하지만, 저역통과 극점의 영향은 아직 완전히 확립되지 않았습니다. 이러한 중첩은 약간의 위상 범프를 발생시켜 단위 이득 주파수를 제한적이지만 충분한 위상 마진을 제공하는 영역에 위치시킵니다. 결과적으로 시스템은 약 30°의 위상 마진과 약 76.47°의 이득 마진을 유지하여 안정적인 동작을 보장합니다.
그림 22는 록인 증폭기의 처리 시간과 입력-출력 지연 시간으로 인해 발생하는 450ns 지연을 나타내는 기준선을 포함합니다. 이 지연은 아직 시스템의 위상 마진을 제한하지 않으므로 추가적인 위상 보상의 여지가 있음을 나타냅니다. 안정성을 높이기 위해 1~100kHz 주파수 범위에서 최대 90°의 위상 진폭을 제공하는 미분기 항을 컨트롤러에 추가할 수 있습니다. 이 경우, 교차 주파수가 1kHz인 미분기가 도입되었습니다. 수정된 PID 컨트롤러와 해당 OLTF는 다음 방정식으로 표현됩니다.

미분기 항을 포함하는 업데이트된 OLTF \(G_{PID}(s)\)는 비교를 위해 그림 22에 도시되어 있습니다. 미분기 교차 주파수 \(D_{cross}\)는 1kHz로 설정되고, 다른 모든 매개변수는 이전 PI 제어 루프 \(G_{PI}(s)\)와 동일하게 유지됩니다. 그림 22에서 파란색 곡선은 \(G_{PI}(s)\)를 나타내고, 주황색 곡선은 향상된 \(G_{PID}(s)\)를 나타냅니다. 두 구성의 이득 및 위상 마진도 표시됩니다. 이득 마진은 크게 변하지 않지만 위상 마진은 PI의 경우 30.45°에서 PID 구성의 경우 93.49°로 크게 증가합니다. 이는 1kHz 미분기 도입의 효과를 확인합니다. 또한 PID의 경우 단위 이득 주파수가 더 높아져 제어 대역폭이 증가했음을 나타냅니다.
추가적인 최적화는 더 높은 주파수에서의 고유한 지연으로 인해 \(G_{PID}(s)\)의 위상 응답이 제한되므로 크기 응답을 개선하는 데 중점을 둘 것입니다.
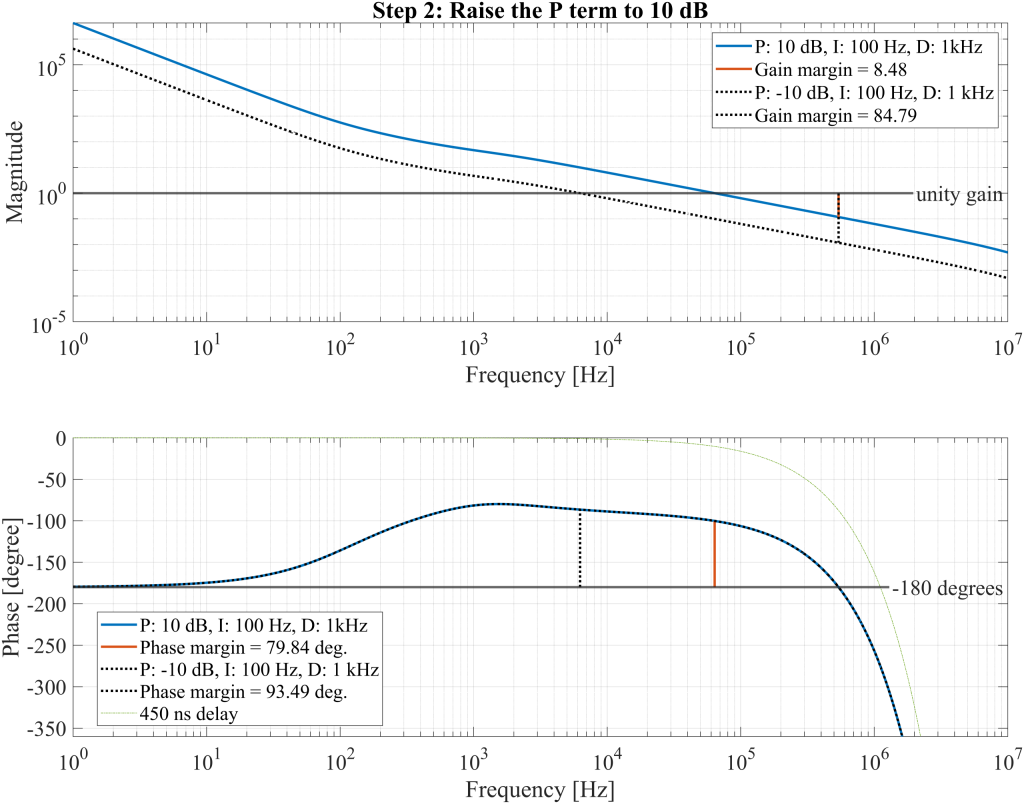
비례 이득을 10dB로 높입니다.
1kHz 미분기를 도입하면서 1kHz에서 100kHz까지의 주파수 범위에서 위상 마진이 크게 향상되었고, 이득 마진은 84.79에 도달했습니다. 이는 시스템 안정성을 유지하면서 비례 이득을 높이고 개방 루프 이득을 향상시킬 수 있는 충분한 여지를 제공합니다. 비례 이득을 20dB 증가시키는 것은 이득 마진을 8.479로 줄이고 단위 이득 주파수를 약 60kHz로 이동시키므로 허용 가능한 수준이며, 이는 여전히 안정적인 동작 범위 내에 있습니다. 결과적으로 이득 마진과 위상 마진 모두 충분하게 유지되고 루프 이득은 20dB 증가합니다. 업데이트된 OLTF(On-Line Task Force)는 그림 23에 도시되어 있으며, 수정된 이득 마진과 위상 마진도 함께 표시되어 있습니다.
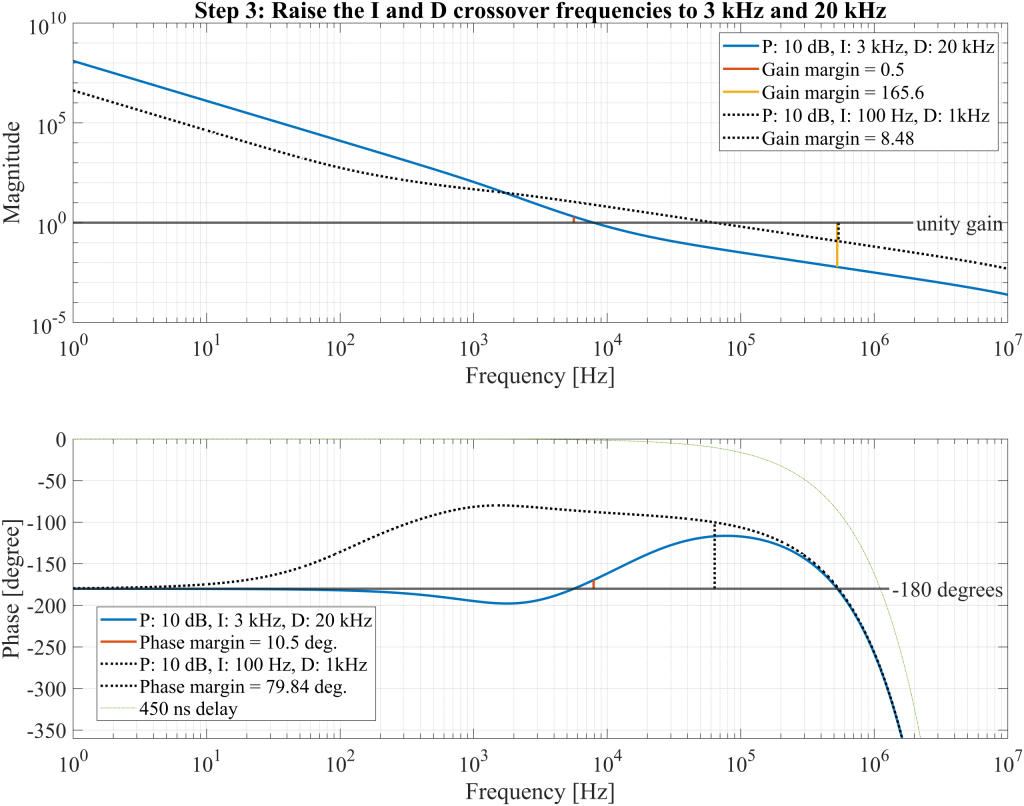
적분기와 미분기 주파수를 더 높이십시오.
저주파 이득을 더욱 향상시키기 위해 적분기 및 미분기 이득을 높일 수 있습니다. 1kHz에서 100kHz 사이의 가용 위상 헤드룸 덕분에 고주파수에서 위상 마진에 큰 영향을 미치지 않으면서 이러한 절충이 가능하기 때문입니다. 이 구성에서는 적분기 교차 주파수를 3kHz로, 미분기 교차 주파수를 20kHz로 높여 저주파 루프 이득을 더욱 증가시킵니다.
업데이트된 OLTF는 그림 24에 나타나 있으며, 이득 마진과 위상 마진 모두에 주석이 달려 있습니다. 이러한 마진은 현재 제한되어 있어 시스템이 불안정해질 수 있음을 시사합니다. 전달 함수를 살펴보면, 미분기 교차 주파수가 증가함에 따라 단위 이득 주파수가 8kHz로 이동하는 것을 확인할 수 있습니다. 그러나 약 100kHz에서 위상은 임계 -180° 임계값보다 훨씬 높게 유지되는데, 이는 추가적인 비례 이득을 적용하여 단위 이득 주파수를 높이고 위상 마진을 회복할 수 있음을 나타냅니다.
OLTF가 -180° 위상을 여러 번 교차하여 여러 이득 마진을 발생시킨다는 점에 유의해야 합니다. 여기서 중요한 것은 임계 불안정점(\(G(s)=-1\))에 가장 가까운 두 개의 마진입니다. 비례 이득을 증가시키면 \(|G(s)|\)가 5.6kHz 근처에서 단위에서 더 멀어지는 반면, 동시에 528kHz 근처에서는 단위에 가까워집니다. 이러한 변화는 단위 이득 주파수를 기준으로 양쪽 이득 마진 간에 상충 관계를 발생시킵니다.
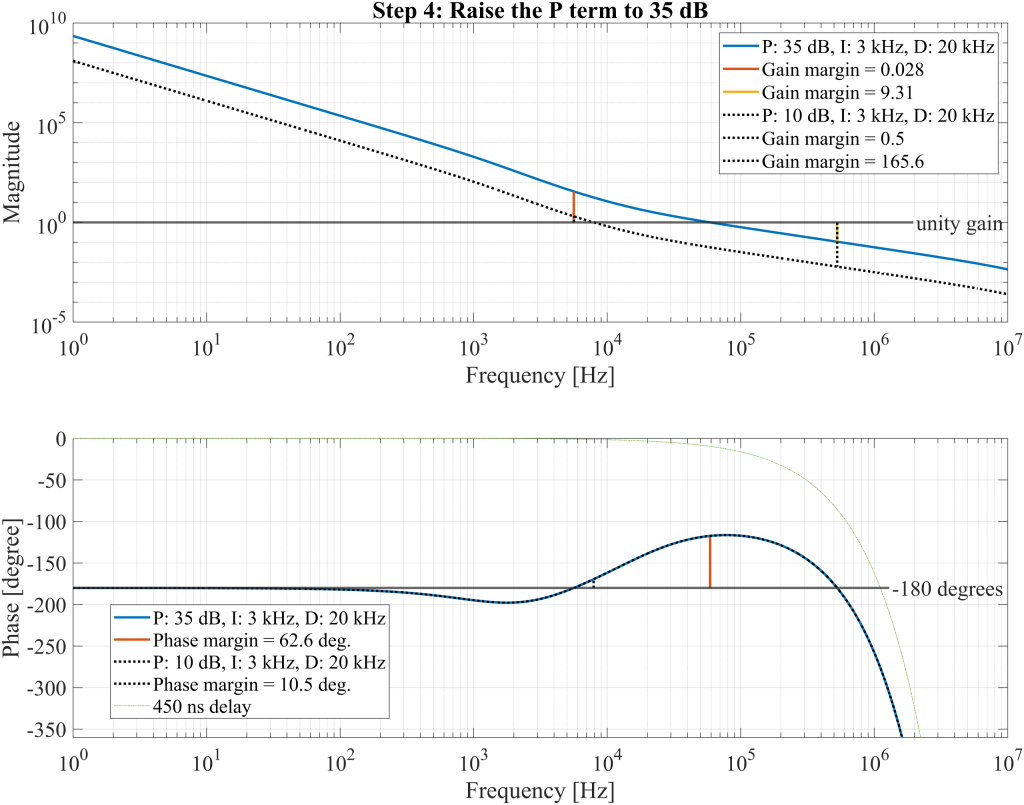
비례 이득을 35dB로 높입니다.
비례 이득을 높이면 루프 안정성과 이득이 모두 향상될 수 있다는 점을 고려하여, 비례 이득을 35dB로 높였습니다. 이는 25dB 증가를 의미합니다. 이러한 조정을 통해 단위 이득 주파수가 약 70kHz로 이동하여 위상 여유가 더 좋아지고 단위점을 기준으로 양쪽의 이득 여유도 균형을 이룹니다. 업데이트된 개방 루프 전달 함수는 그림 25에 나와 있습니다. 이제 위상 여유는 62.6°이고, 이득 여유는 0.028과 9.31입니다. 이는 시스템이 \(G(s)=-1\)에서 적절한 안전 여유를 가지고 있음을 나타냅니다.
나이퀴스트 기준을 사용한 안정성 분석
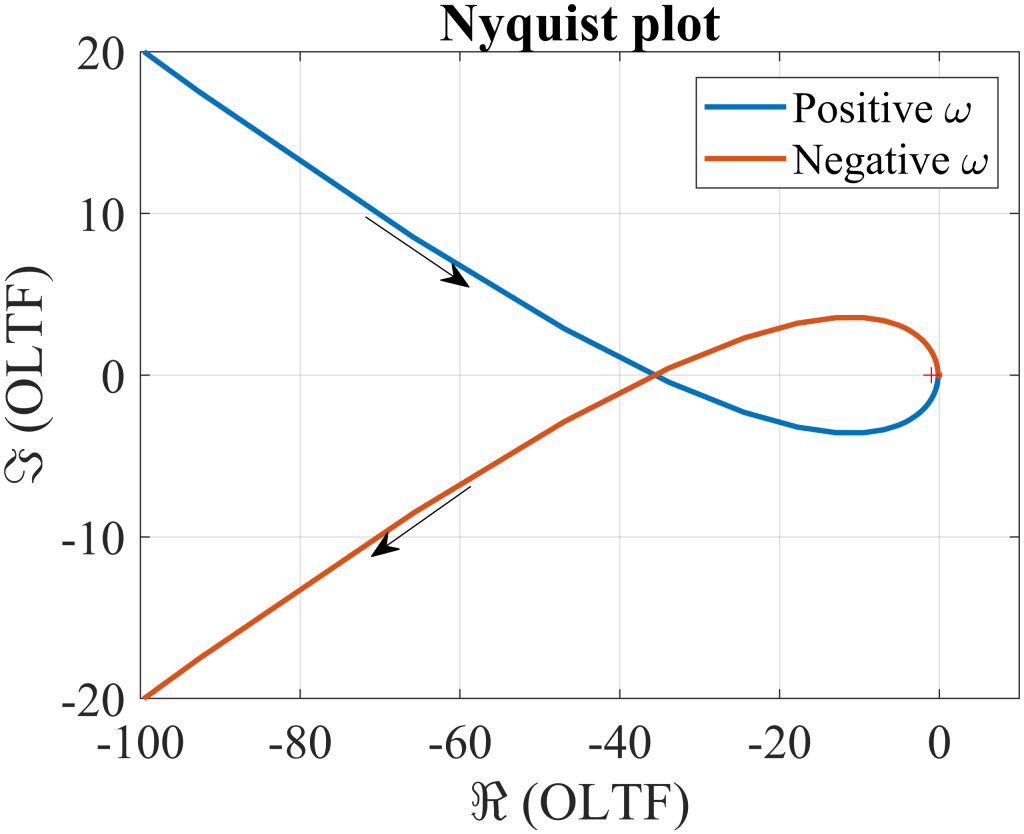
그림 25에서 위상 응답이 180° 지점을 두 번 교차하는 것을 관찰할 수 있습니다. 이러한 교차 중 하나는 5.6kHz 부근에서 발생하며, 1보다 큰 이득 \(|G(s)|\)에 해당합니다. 이러한 조건은 해당 주파수에서 양의 피드백을 유발하여 잡음을 증폭시키고 불안정성을 유발할 수 있습니다. 시스템의 안정성을 더욱 엄격하게 평가하려면 폐루프 시스템의 극점을 분석하는 것이 필수적입니다. 기본적인 폐루프 표현식을 상기하면, 시스템의 출력-입력 전달 함수는 \(H(s)= \frac{G(s)}{1+G(s)}\)로 주어지므로 \(H(s)\)의 극점은 \(1+G(s)\)의 영점입니다.
이 분석에 유용한 방법은 전체 오른쪽 절반을 둘러싸는 윤곽선을 따라 OLTF \(G(s)\)를 평가하는 Nyquist 플롯입니다. s 평면. 이 접근법은 순수 지연 \(e^{-\tau s}\)을 포함하는 시스템에 특히 유용합니다. 이러한 지연은 초월적이며 집중 요소 모델을 사용하여 정확하게 표현할 수 없기 때문입니다. 나이퀴스트 기준에 대한 자세한 설명은 이 글의 범위를 벗어나지만, 많은 자료에서 자세히 설명하고 있습니다. 피드백 이론에 대한 가이드 Joel L. Dawson의 책은 시작하기에 좋은 책입니다.
나이퀴스트 기준을 적용하기 위해 P는 오른쪽 절반의 \(G(s)\) 극의 수를 나타냅니다. s 비행기, 그리고 N 임계점 \((-1,0j)\) 주위의 포위 횟수를 나타냅니다. Z우반평면에서 \(1+G(s)\)의 영점 개수는 \(N=ZP\) 관계를 만족합니다. 따라서 \(G(s)\)의 우반평면 극점 개수를 결정하고 \((-1,0j)\)의 포위망을 세면 폐루프 시스템의 안정성을 직접적으로 추론할 수 있습니다.
그림 26은 시스템의 나이퀴스트 플롯을 나타내며, 임계점 \((-1,0j)\)은 빨간색 십자 표시로 표시되어 있습니다. 이 플롯은 그림 25에서 \((-1,0j)\)가 시계 반대 방향으로 한 번 둘러싸인 모습을 보여주는데, 이는 잠재적인 불안정성을 시사합니다. 그러나 루프에 두 개의 순수 적분기(하나는 VCO의 주파수-위상 변환 회로에서, 다른 하나는 PID 제어기에서)가 존재하기 때문에 플롯이 무한 반경으로 확장되어 정량적 분석이 불가능합니다. 시스템은 정성적 분석도 수행해야 합니다.
복소 주파수 변수 s가 s 평면에서 원점을 중심으로 시계 반대 방향으로 180° 회전할 때, 원점에 극점으로 표현된 두 적분기는 나이퀴스트 플롯에서 무한 반경에서 총 360°의 시계 방향 위상 편이를 발생시킵니다. 이로 인해 시계 방향의 회전이 발생하고, 이는 초기의 반시계 방향 회전을 상쇄하여 최종 회전은 0이 됩니다.
OLTF는 오른쪽 절반에 극이 없으므로 s 평면이고 점 \((-1,0j)\)의 전체 둘레도 0이므로, 폐루프 시스템은 s 평면의 오른쪽 절반에 극점이 없습니다. 따라서 최적화된 시스템은 안정 상태를 유지합니다.
최적화된 루프의 개방 루프 전달 함수
OLTF를 최적화하고 폐루프 시스템의 안정성을 검증한 후, PID 제어기를 비례 이득 35dB, 적분기 교차 주파수 3kHz, 미분기 교차 주파수 20kHz로 구성했습니다. 그런 다음 모델을 검증하기 위해 시스템을 측정했습니다. 그림 27은 측정된 OLTF와 시뮬레이션된 OLTF를 모두 보여주며, 그림 28은 시스템의 기준 추종 및 외란 제거를 보여줍니다. 측정 결과는 모델 예측과 거의 일치합니다.
소음 특성화
이 섹션에서는 내부 클록을 기준으로 하는 동일한 Moku:Pro 장치를 사용하여 주파수 잡음을 평가합니다. 따라서 클록 자체의 지터나 위상 잡음은 측정에서 제외됩니다. 센서 잡음이 주파수 잡음 분석에 미치는 영향을 줄이기 위해 루프 외부 주파수 센서를 사용합니다. 이 구성에서 센서 잡음의 주요 원인은 아날로그-디지털 변환기(ADC)입니다. 그림 29와 같이 VCO 출력은 측정 정확도를 높이기 위해 두 개의 별도 경로로 나뉩니다. 한 경로는 피드백 루프의 오류 신호를 생성하기 위해 ADC 입력 1로 전송되고, 다른 경로는 ADC 입력 3과 VCO의 주파수 잡음을 측정하는 독립적인 루프 외부 센서 역할을 하는 위상계로 라우팅됩니다.
주파수 잡음은 자유 실행, PI 제어기와 동기화, 그리고 최적화된 PID 제어기와 동기화의 세 가지 조건에서 측정되었습니다. 시간 영역 결과는 그림 30에 나와 있습니다. 최적화된 PID 제어기는 약 ±20Hz의 피크 간 주파수 잡음을 달성하며, 이는 위상계(Phasemeter)의 잡음 플로어(보라색 선으로 표시)에 근접합니다.
이러한 성능은 제어 루프가 교란을 1/1+G(s)로 감쇠시키기 때문에 달성됩니다. 최적화된 구성에서 루프 이득은 VCO 주파수에 영향을 줄 수 있는 환경 진동 및 온도 변화를 포함하여 루프 내 잡음을 효과적으로 억제할 만큼 충분히 높습니다.
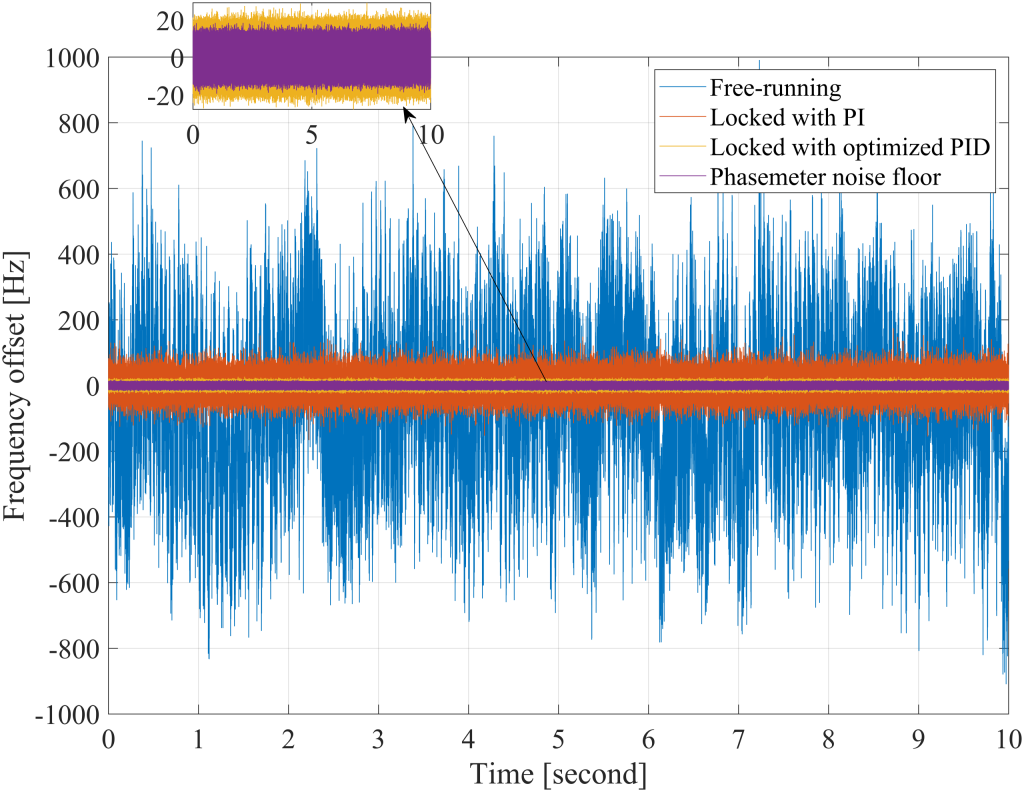
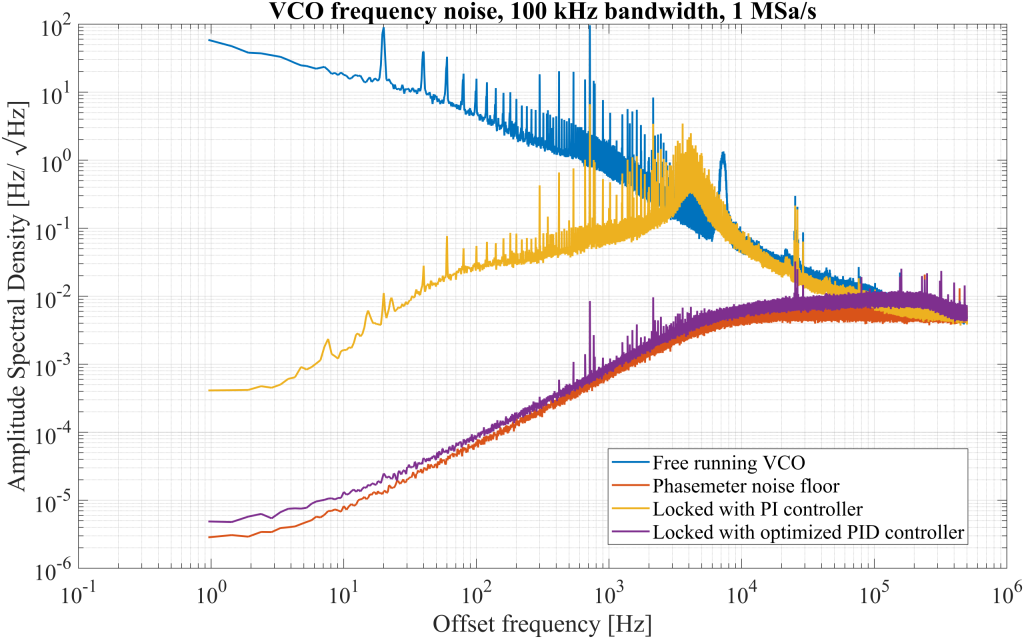
그림 31은 측정된 주파수 잡음의 ASD를 나타냅니다. 최적화된 PID 제어기에 해당하는 보라색 선은 Phasemeter의 잡음 플로어와 거의 일치하여 시스템이 성능 한계에 근접하여 작동하고 있음을 나타냅니다. 뚜렷한 잡음 피크가 나타나지 않는다는 점은 최적화된 개루프 전달 함수가 충분한 위상 마진을 제공하여 안정적이고 감쇠가 잘 된 동작을 보장함을 더욱 확실히 보여줍니다.
제품 개요
이 애플리케이션 노트는 VCO와 내부 PID 컨트롤러가 장착된 록인 증폭기로 구성된 PLL 시스템의 분석 및 최적화에 대해 자세히 설명합니다. 비례, 적분, 미분 성분을 체계적으로 조정하여, 안정적인 동작을 보장하기 위해 적절한 위상 및 이득 마진을 유지하면서 루프 이득을 극대화하도록 OLTF(\(G(s)\)를 설계했습니다. 시스템 안정성은 나이퀴스트 기준을 사용하여 확인했으며, CLTF(\(H(s)\)에 우반평면 극점이 없음을 검증했습니다.
실험 검증에는 측정된 OLTF와 시뮬레이션된 OLTF의 비교가 포함되었으며, 결과는 거의 일치했습니다. 주파수 잡음 성능은 자유 실행, PI 제어기 잠금, 최적화된 PID 제어기 잠금의 세 가지 작동 조건에서 평가되었습니다. 최적화된 구성은 Phasemeter 잡음 플로어에 가까운 성능을 달성하여 기계적 진동 및 온도에 의한 주파수 드리프트와 같은 외부 외란을 억제하는 데 효과적임을 입증했습니다.

