



ノイズの多いチャネルでの信号の存在を正確に検出することは、レーダーやLiDARなどの飛行時間測距法からセキュリティエンジニアリングやハードウェア侵入テストまで、多くのアプリケーションにとって重要です。マッチドフィルタは、既知の信号の存在と到着時間の検出に最適なフィルタ設計です。このアプリケーションノートでは、マッチドフィルタの有効性を、 FIR フィルタ ビルダー 任意波形発生器このデモンストレーションを通じて、 Moku:Pro 迅速な信号検出アプリケーションでは、Mokuでオートエンコーダなどのツールを使用することもできます。 ニューラルネットワーク.
このデモンストレーションを通じて、 Moku:Pro 迅速な信号検出アプリケーションでは、Mokuでオートエンコーダなどのツールを使用することもできます。 ニューラルネットワーク.
マッチドフィルタの紹介
通信およびレーダー システムの信号対雑音比 (SNR) を改善することは、検出精度を高めるための重要な要件です。整合フィルタは、対象の波形の形状がわかっている場合に SNR 性能を向上させるために広く使用されている技術です。これは、周波数領域で定義された通過帯域および/または阻止帯域を備えた従来のフィルターや、時間領域の要素を排除することを目的としたボックスカー アベレージャとは対照的です。
このアプリケーション ノートでは、マッチド フィルターの背後にある理論について詳しく説明します。さらに、Moku:Pro でのマッチド フィルターの 2 つのアプリケーションをデモします。
経歴
マッチドフィルタリングは、入力信号が既知のテンプレートに「一致する」場合に高出力を提供します。簡単な例として、既知の周波数の正弦波のサイクルと一致するマッチドフィルタを設計します。このフィルタは、入力信号にその周波数の正弦波が存在する場合は常に高出力を提供し、その結果、単純な オンオフキーイング (OOK) デジタル通信受信機。
この構成での整合フィルタリングの有効性を実証するために、次のシミュレーションを実施しました。 図1システムのネイティブSNRは-3.01dBでしたが、整合フィルタを導入することで18.74dBまで大幅に改善されました。この結果は、送信電力を増加させることなくSNR性能を向上させる整合フィルタの有効性を示しています。
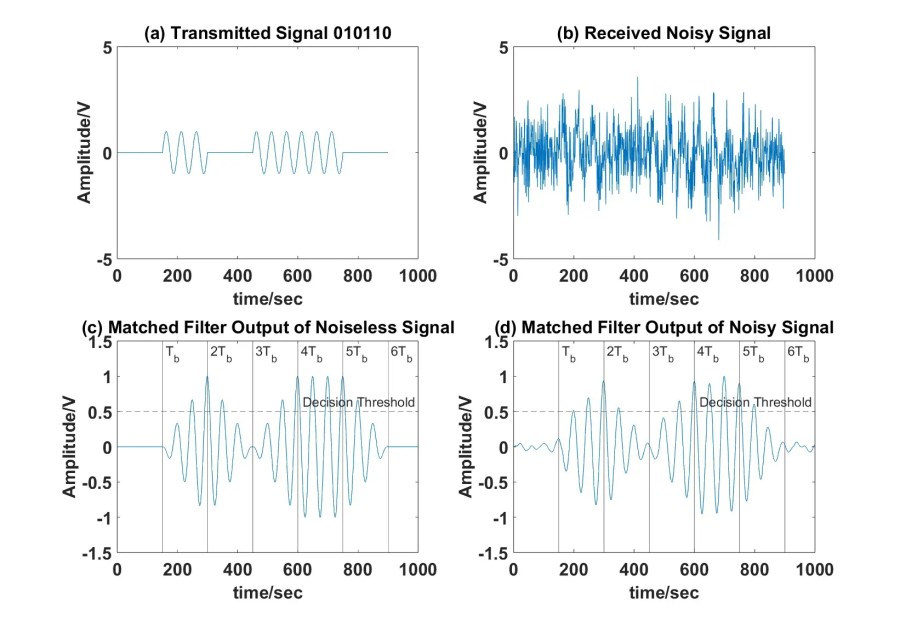
図1: 整合フィルタの有効性のデモンストレーション。(a): 010110 というデータを持つノイズのない送信信号、(b): 大きな加法性ホワイトノイズを含む受信信号。通常の復号アルゴリズムではビットを復号できません。(c): ノイズのない送信信号の整合フィルタ出力、(d): ノイズのある受信信号の整合フィルタ出力。理想的なチャネルとノイズのあるチャネルの両方で、すべての変調ビットが正しく復号されています。
整合フィルタの導出
連続信号に基づく導出
フィルタリングされた受信信号の従来の信号モデルは式2.1.1で表される。 y(t) は受信信号を示します。 p(t) 送信信号を表し、 h(t) 受信信号の信号対雑音比を最適化するように設計された受信フィルタを表す。チャネルにおける加法性雑音の存在は次のように表される。 n(t)さらに、処理された信号とノイズはそれぞれpotとno(t)で表されます。

パーシヴァルの法則[1]は、時間領域の信号パワーとノイズの合計パワーが周波数領域の対応するパワーと等しいと述べています。さらに、  通常、パワー スペクトル密度 (PSD) を伴う加法性ホワイト ノイズであると想定されます。
通常、パワー スペクトル密度 (PSD) を伴う加法性ホワイト ノイズであると想定されます。  周波数に依存しないこと。この基本原則に従って、期待されるパワーは、 は時間的に一定で、期待される力は です。 は時間的に一定で、期待される力は です。
周波数に依存しないこと。この基本原則に従って、期待されるパワーは、 は時間的に一定で、期待される力は です。 は時間的に一定で、期待される力は です。  ノイズ信号の PSD を乗算した結果
ノイズ信号の PSD を乗算した結果  および受信フィルターの PSD
および受信フィルターの PSD 
受信信号のパワー  当時の
当時の  サンプリング時間によって異なります これは、送信信号の PSD が時間不変ではない性質があるためです。 PSD は次によって与えられます。
サンプリング時間によって異なります これは、送信信号の PSD が時間不変ではない性質があるためです。 PSD は次によって与えられます。  。そのような:
。そのような:

したがって、SNR は  示される
示される  次のように表すことができます。
次のように表すことができます。

式 2.1.3 を解き、最適化された SNR の条件を見つけるために、Cauchy-Schwarz 不等式を適用します。既知の送信信号の SNR パフォーマンスを最大化する条件を式 2.1.4 に示します。

そして、導出された最適なフィルター、すなわち整合フィルターは式 2.1.5 で与えられます。

場所  の三脚と
の三脚と  信号の長さです。の選択
信号の長さです。の選択  カジュアルでありながら最短遅延のフィルターを実現します。さらに、定数乗数
カジュアルでありながら最短遅延のフィルターを実現します。さらに、定数乗数  ノイズとシングルを均等にスケーリングするため、分析から省略できます。
ノイズとシングルを均等にスケーリングするため、分析から省略できます。
デジタルシステムへの拡張
式 2.1.5 の式は、連続時間における最適なフィルターです。定量的な比較を行うために、離散時間デジタル システムの SNR パフォーマンスを分析します。
式 2.2.1 では、整合フィルターの長さは次のようになります。  予想されるノイズ電力は
予想されるノイズ電力は ![E(|n_{o}[タウ]|^2)](https://s0.wp.com/latex.php?latex=E%28%7Cn_%7Bo%7D%5B%5Ctau+%5D%7C%5E2%29&bg=ffffff&fg=000&s=0&c=20201002) 。この式では、デジタル化されたチャネル ノイズが考慮されます。
。この式では、デジタル化されたチャネル ノイズが考慮されます。 ![n[タウ]](https://s0.wp.com/latex.php?latex=n%5B%5Ctau+%5D&bg=ffffff&fg=000&s=0&c=20201002) 、フィルタリングされたノイズと一致
、フィルタリングされたノイズと一致 ![n_{o}[タウ]](https://s0.wp.com/latex.php?latex=n_%7Bo%7D%5B%5Ctau+%5D&bg=ffffff&fg=000&s=0&c=20201002) 、およびマッチドフィルターのインパルス応答
、およびマッチドフィルターのインパルス応答 ![h[タウ]:](https://s0.wp.com/latex.php?latex=h%5B%5Ctau+%5D%3A&bg=ffffff&fg=000&s=0&c=20201002)
![式2.2.1において、整合フィルタの長さは\({N}\)、期待されるノイズ電力は\(E(|n_{o}[tau ]|^2)\)である。この式では、デジタル化されたチャネルノイズ\(n[tau ]\)、整合フィルタ処理後のノイズ\(n_{o}[tau ]\)、および整合フィルタのインパルス応答\(h[tau ]:\)を考慮している。](https://i0.wp.com/liquidinstruments.com/wp-content/uploads/2023/07/2.2.1-2.png?resize=700%2C76&ssl=1)
の一番右の部分 ![E(n[タウ - l_{1}]n[タウ - l_{2}])](https://s0.wp.com/latex.php?latex=E%28n%5B%5Ctau+%C2%A0-+l_%7B1%7D%5Dn%5B%5Ctau+-+l_%7B2%7D%5D%29&bg=ffffff&fg=000&s=0&c=20201002) 式 2.2.1 の は、ホワイト ノイズの相関関係です。式 2.2.2 は、次の場合にのみノイズ電力がゼロ以外の値を持つことを示しています。
式 2.2.1 の は、ホワイト ノイズの相関関係です。式 2.2.2 は、次の場合にのみノイズ電力がゼロ以外の値を持つことを示しています。  。デジタル化されたマッチドフィルター
。デジタル化されたマッチドフィルター ![h[l]](https://s0.wp.com/latex.php?latex=h%5Bl%5D&bg=ffffff&fg=000&s=0&c=20201002) は式 2.1.5 から導出されます。
は式 2.1.5 から導出されます。 ![h[l] = p[N - 1 - l]](https://s0.wp.com/latex.php?latex=h%5Bl%5D+%3D+p%5BN+-+1+-+l%5D&bg=ffffff&fg=000&s=0&c=20201002) 整合フィルタリング後のノイズは式 2.2.3 に示されます。
整合フィルタリング後のノイズは式 2.2.3 に示されます。
![式1の\(E(n[tau - l_{2}]n[tau - l_{2.2.1}])\)の右端部分は、白色ノイズの相関です。式2.2.2は、\(l_{1} = l_{2}\)の場合にのみ、ノイズ電力が非ゼロ値になることを示しています。デジタル化された整合フィルタ\(h[l]\)は式2.1.5、\(h[l] = p[N - 1 - l]\)から導かれ、整合フィルタ処理後のノイズは式2.2.3で示されます。](https://i0.wp.com/liquidinstruments.com/wp-content/uploads/2023/07/2.2.23.png?resize=700%2C274&ssl=1)
整合フィルタ出力のピーク電力は、式 2.2.4 で与えられます。整合フィルタのインパルス応答は次のように変化するため、整合フィルタの出力ピーク電力は送信パルスのエネルギーの XNUMX 乗です。 は時間反転送信パルスです ![p[N - 1 - l]:](https://s0.wp.com/latex.php?latex=p%5BN+-+1+-+l%5D%3A&bg=ffffff&fg=000&s=0&c=20201002)
![整合フィルタ出力のピーク電力は式2.2.4で与えられる。整合フィルタ出力のピーク電力は送信パルスのエネルギーの1乗となる。これは、整合フィルタのインパルス応答\(h[l]\)が時間反転した送信パルス\(p[N - XNUMX - l]:\)であるためである。](https://i0.wp.com/liquidinstruments.com/wp-content/uploads/2023/07/2.2.4-1.png?resize=826%2C85&ssl=1)
したがって、出力信号のピークにおける SNR は式 2.2.5 の式になります。送信信号のパワーは次の式で与えられることに注意してください。 ![frac{1}{N} sum_{タウ = 0}^{N - 1} |p[タウ ]|^2](https://s0.wp.com/latex.php?latex=%5Cfrac%7B1%7D%7BN%7D+%5Csum_%7B%5Ctau+%3D+0%7D%5E%7BN+-+1%7D%C2%A0+%7Cp%5B%5Ctau+%5D%7C%5E2&bg=ffffff&fg=000&s=0&c=20201002) ノイズ電力は次の式で与えられます。
ノイズ電力は次の式で与えられます。 
![したがって、出力信号のピークにおけるSNRは式2.2.5のようになります。送信信号の電力は\(frac{1}{N} sum_{tau = 0}^{N - 1} |p[tau ]|^2\)で与えられ、ノイズ電力は\(sigma_{n}^2:\)で与えられることに注意してください。](https://i0.wp.com/liquidinstruments.com/wp-content/uploads/2023/07/2.2.5.png?resize=700%2C75&ssl=1)
SNRの改善率は、導入部のシミュレーションにおけるSNRの増加と一致しています。このシミュレーションでは、21.75サンプルのフィルタで150dBのSNRの改善が見られ、定量分析では次のようになります。  強化。
強化。
整合フィルタの応用
このセクションでは、マッチド フィルタの 2 つのアプリケーションであるレーダー距離センシング (パルス圧縮) と波形トリガーについて紹介し、説明します。
レーダーパルス圧縮
最初の例では、レーダー パルス圧縮を調べます。レーダー システムでは、送信機がターゲットに向けて電波のバーストを放射します。次に、レーダー受信機は、ターゲットによって反射された反射エコーを受信します。飛行時間、つまり距離遅延により、ターゲットまでの距離を計算できます。
このアプリケーションは、図1に示す通信の例と類似しています。レーダーシステムと通信システムはどちらも、ノイズの多い受信環境で信号を検出するように設計されているからです。整合フィルタを備えていない従来のレーダーでは、効果的に動作させるには高い送信電力が必要であり、距離分解能は送信パルスの長さによって大きく制限されます。
この問題に対処するには、整合フィルタを使用して受信パルスを時間内に圧縮します。フィルターからの狭いパルス出力により最高の空間分解能が得られますが、実際の送信信号は広いままで送信エネルギーが増加するため、高出力を必要とせずに SNR を高めることができます。具体的には、チャープ (周波数が線形に増加する正弦波) は、自己相関が狭く、生成が比較的簡単であるため、送信信号としてよく使用されます。
理論と導出
リチャーズ[2]はチャープ波の複素包絡線の曖昧性関数を規定する式3.1.1を導出した。  はチャープの帯域幅を表し、 τ はチャープ波の時間幅を表します。
はチャープの帯域幅を表し、 τ はチャープ波の時間幅を表します。

レーダーの距離分解能は、ピークと最初のヌル ポイントの間の距離であるレイリー分解能によって決まります。のピーク  で観察されています
で観察されています  、分子の引数が次の場合に最初の null が発生します。
、分子の引数が次の場合に最初の null が発生します。  、つまり、
、つまり、  。 のために
。 のために  、この式は式 3.1.2 として表すことができます。
、この式は式 3.1.2 として表すことができます。

根は次のように表現できます。  。負の符号を選択すると、中心点に最も近い正の根が得られます。
。負の符号を選択すると、中心点に最も近い正の根が得られます。  、それによって時間領域のレイリー分解能が決定されます。この結果は、式 3.1.3 の平方根のテイラー級数展開で簡略化できます。
、それによって時間領域のレイリー分解能が決定されます。この結果は、式 3.1.3 の平方根のテイラー級数展開で簡略化できます。

したがって、レイリー分解能は時間内に  約です
約です  秒。対応するレイリー距離分解能は次のとおりです。
秒。対応するレイリー距離分解能は次のとおりです。  式 3.1.4 のメートルは、送信信号の往復により XNUMX 倍になります。
式 3.1.4 のメートルは、送信信号の往復により XNUMX 倍になります。

注意すべき重要な点は、Moku:Pro のような任意波形発生器 (AWG) は、複雑なエンベロープではなく、チャープ波の実数成分のみを生成するということです。これにより、複素包絡線と正弦波関数のあいまいさ関数に発散が生じます。
前に概説した曖昧さ関数は受信信号の複素エンベロープに基づいていますが、簡単にするためにヒルベルト変換は含まれていません。複雑なエンベロープの詳細な説明と関連する議論については、Mahafza[3]を参照してください。
実数値の正弦波チャープ波のあいまいさ関数の導出は、フレネル積分と三角恒等式の操作を伴うため、困難です。代わりに、単純で変調されていない複素指数波の場合を調べることによって、実数成分のみを使用した場合の効果を説明します。
単純な非変調複素指数関数の複素包絡線の整合フィルタリング方程式は、次のように表すことができます。

式 3.1.5 は、複素指数曖昧性関数のヌルが実部と虚部の結合ヌルであることを示しています。の大きさ  の三脚と
の三脚と  時間オフセットτがゼロのときに最大となるが、
時間オフセットτがゼロのときに最大となるが、  の三脚と
の三脚と  τの期間後に最大となる(すなわち、
τの期間後に最大となる(すなわち、  ラジアン)、実部のヌルに対応します
ラジアン)、実部のヌルに対応します  。その結果、実数と虚数のヌルとピークの不整合により、曖昧性関数のヌルの半分がキャンセルされます。虚数成分を削除すると、これらのキャンセルが削除され、NULL の数が 2 倍になります。
。その結果、実数と虚数のヌルとピークの不整合により、曖昧性関数のヌルの半分がキャンセルされます。虚数成分を削除すると、これらのキャンセルが削除され、NULL の数が 2 倍になります。
直感に反して、レイリー分解能は、完全な複素エンベロープと比較して、実関数では約 2 倍向上します。複素指数を使用したこの図は、シミュレーションで検証されたように、元のチャープ波に適用できる一般的な結果です (図 XNUMX)。純粋な実波形を使用した更新されたレイリー時間分解能と距離分解能の値は、次のようになります。


図2: 受信した実数値チャープの曖昧性関数の比較  および受信信号の複素エンベロープ (青)。
および受信信号の複素エンベロープ (青)。
レイリー解像度  時間内のレーダーの最小解像度を決定します。図 3 (a) は、正確に分離された XNUMX つのチャープの整合フィルタ出力を示しています。 建設的に重なり合うと、上部が平らになります。ピーク検出器は単一のピークとして識別します。理論的には、ターゲットがこれ以上離れている場合、小さなディップが予想され、分離が成功します。ただし、実際のアプリケーションでは、小さなディップがノイズによって隠蔽される可能性があり、2 つのパルスを確実に区別できるようになる前に、パルス間でフィルタ出力が名目上ゼロに低下することが要求されるのが一般的です。そのため、このアプリケーション ノートでは、null-to-null 幅のデモンストレーションに焦点を当てます。
時間内のレーダーの最小解像度を決定します。図 3 (a) は、正確に分離された XNUMX つのチャープの整合フィルタ出力を示しています。 建設的に重なり合うと、上部が平らになります。ピーク検出器は単一のピークとして識別します。理論的には、ターゲットがこれ以上離れている場合、小さなディップが予想され、分離が成功します。ただし、実際のアプリケーションでは、小さなディップがノイズによって隠蔽される可能性があり、2 つのパルスを確実に区別できるようになる前に、パルス間でフィルタ出力が名目上ゼロに低下することが要求されるのが一般的です。そのため、このアプリケーション ノートでは、null-to-null 幅のデモンストレーションに焦点を当てます。  .
.

図3: (a): の距離で建設的にオーバーラップした整合フィルタ出力  、(b): マッチドフィルター出力
、(b): マッチドフィルター出力  分離は名目上、パルス間でゼロに低下します。騒がしい環境でも、それらを明確に区別できる可能性が向上します。
分離は名目上、パルス間でゼロに低下します。騒がしい環境でも、それらを明確に区別できる可能性が向上します。
Moku:Pro によるパルス圧縮
導入部で説明した単純なオン/オフキー付き正弦波を用いたシミュレーションとは対照的に、本節のシミュレーションでは、より優れたレイリー距離分解能を実現するために、広い帯域幅を持つ正弦波チャープ波を使用しています。図4は、チャープ波のメインローブ幅が正弦波パルスに比べて狭いことを示しています。

フィギュア 4: (ac) 導入部の OOK 正弦波と同じシミュレーションを、代わりにチャープを使用して実行します。 (d) チャープからの整合フィルター出力 (オレンジ) は、圧倒的なチャネル ノイズが存在する場合でも、正弦波 (青) よりもメイン ローブ幅がはるかに小さくなります。
以下のセクションで検証に使用したMoku:Proマルチインストゥルメントモードの構成は、 図5。このセットアップでは、任意波形発生器 (AWG) が 2 つの異なるチャープ波を生成し、チャネル B の帯域幅がチャネル A の半分になります。 FIR フィルター ビルダー (FIR) を使用して、生成されたチャープ波の整合フィルターを実装します。 AWG。その結果、チャネル B 出力のレイリー分解能はチャネル A の半分になることが予想されます。

フィギュア 5テストと検証に使用される Moku:Pro マルチインストゥルメント モード構成。
AWG を使用して、方程式波形タイプを使用してチャープ波を定義します。定義式を式 3.1.7 に示します。


フィギュア 6: AWG で生成されたチャープ波、チャンネル A (赤) はチャンネル B (青) の帯域幅の 2 倍です。
AWGは、200 Hzの繰り返し周波数とパルス変調によりチャープ波形を生成し、チャープパルスを生成しました。チャンネルAのチャープ波形の等価帯域幅は40,000 Hzです。したがって、チャンネルAとチャンネルBを組み合わせた波形の最小ヌル間幅2Δ𝑡は次の式で表されます。

FIR フィルターは、式 (3.1.10) に従って、チャープ波の値を時間的に反転した値を持つカーネルをロードすることにより、整合フィルターとして構成されました。 FIR フィルターの設定を以下に示します。 図7。入力チャープ波の幅とサンプリング周期によってフィルター係数の数が決まります。

AWG 波形と FIR フィルター カーネルの長さは同じで、カーネルは生成された波形と同じ形状を共有します。したがって、チャネル A の FIR フィルターの方程式は、方程式 3.1.10 のように書くことができます。


フィギュア 7: FIR フィルター ビルダー チャネル A の構成。
これで、AWG と FIR でそれぞれ送信波形生成と整合フィルタリングが設定され、パルス圧縮の効果を調べることができます。赤い曲線はチャンネル A の整合フィルターの出力を示し、青い曲線はチャンネル B の出力を示します。青い曲線の幅は赤い曲線の 3.1.8 倍であり、以前の結果が裏付けられ、時間分解能が高いことが証明されています。フィルター出力は帯域幅に反比例します。最初の XNUMX つのヌル間の距離は、式 XNUMX の定理と一致します。

フィギュア 8: Moku:Pro に基づくパルス圧縮実験。赤い曲線は青い曲線の帯域幅の 1 倍の帯域幅を持ち、赤い曲線の距離分解能は青い曲線の 2/XNUMX です。
ここまでで理論とシミュレーションは完了です。次のステップは、実ノイズを含むチャープパルスに整合フィルタを適用することです。図10に示す結果は、整合フィルタが大きなノイズ電力(-73.98 dBm)と小さな信号電力(-93.46 dBm)に対して良好な性能を示していることを示しています。

フィギュア 9: ノイズ環境でのチャープ整合フィルタの実験セットアップ。

フィギュア 10: マッチドフィルタに入力される受信信号のパワー(青)とマッチドフィルタ出力(赤)。整合フィルタ出力電力のスパイクは、受信信号では肉眼では見えないにもかかわらず、チャープの到着時間を明確に示しています。
図8の解析から、パルス圧縮の興味深い特性が明らかになる。より広い帯域幅を持つチャープ波に対する整合フィルタの出力は、最小ヌル間幅が25μs、パルス幅が5msである。したがって、整合フィルタは、25μsを超える時間間隔で重なり合うXNUMXつの反射チャープ波を区別することができる。 図11および12 Moku:Pro の実験結果を表示します。 図11 は、ノイズのない検証の実行を示しています。2 つの重複するチャープが青で示され、整合フィルターの出力が赤で示されています。 図12 同じ実験ですが、チャープ信号がノイズの多いチャネルで受信されたことを示しています。どちらの場合も、25つのチャープ信号の到着時刻は明確に区別されており、XNUMXマイクロ秒間隔であることが正確に検出されています。ただし、アンビギュイティ関数に非ゼロのサイドローブが存在するため、検出された時間間隔は送信された時間間隔とわずかに異なる可能性があることに留意してください。

フィギュア 11: 同じ帯域幅と時間幅を持ち、25マイクロ秒のオフセットを持つ25つの重なり合うチャープパルス(青)。整合フィルタ出力は、チャープ間のXNUMXマイクロ秒の時間を正しく復元します(赤)。

フィギュア 12: 2 つの重なり合うチャープ波の整合フィルタ出力 (赤) と、フィルタリング前の受信信号 (青) の比較。
波形トリガ
オシロスコープの一般的な機能であるデジタル パターン トリガには、受信したデジタル信号に対して論理演算を実行し、特定のパターンに基づいてオシロスコープをトリガすることが含まれます。たとえば、デジタル信号の下位 8 ビットが High の場合にのみトリガするようにオシロスコープを設定できます。この機能は、さまざまなシナリオにおけるデジタル システムの動作を分析するために重要です。
ただし、チップ障害挿入やサイドチャネル解析などのアプリケーションでは、通常、信号は無線周波数受信機から収集されるため、高レベルのノイズと低い信号振幅が発生する可能性があります。このような場合、デジタル パターン トリガにより多数の誤警報が発生し、チップの動作に関する誤った情報が与えられる可能性があります。
デジタル パターン トリガーの問題に対処する 1 つの解決策は、波形トリガーを使用することです。波形トリガでは、整合フィルタを使用して入力アナログ信号を予想波形と継続的に比較し、予想波形が表示されたときにトリガー イベントを生成します。
従来のオシロスコープでは、このような波形トリガリングを行うための柔軟性が不足しており、専用の「トリガボックス」[4]が必要でした。一方、マルチインストゥルメントモードを備えたMoku:Proでは、FIRフィルタビルダとオシロスコープを同時に使用して、波形トリガリングとオシロスコープ測定を行うことができます。 図13 これはBeckersら[4]の論文を再現したもので、マイクロプロセッサがAdvanced Encryption Standard(AES)を用いてデータパケットをエンコードする際に捕捉された電源レールの異常を示しています。このような動作の検出は、フォールトインジェクション攻撃の実行や、後の分析のための補助データの採取に利用できます。
なお、Beckersら[4]は、トリガーアルゴリズムの前にエンベロープ検出器を配置することで結果を改善しました。Moku:Proでは、Moku Cloud Compile(MCC)を使用して簡単なカスタムロジックを構築し、FIR機器の前に配置することで、同様の操作を実行できます。

フィギュア 13: AES 単一実行パターン
波形トリガがサンプリングと補助データの記録を開始する場合、ユーザーはオシロスコープで表示されるトリガ イベントが発生することを好む場合があります。 start 一致した波形の終わりではなく、その波形の部分です。この場合、追加の FIR フィルター チャネルを「オールパス」構成でセットアップし、整合フィルターの長さに等しい純粋な時間遅延を導入することができます。
図14は、オシロスコープ(青)に表示されるFIRフィルタビルダによるトリガ信号の生成が成功したことを示しています。さらに、FIRフィルタビルダはフィルタ処理されていない入力信号を正確に遅延させているため、トリガ波形全体をキャプチャして後で検証することができます。図14(a)に示すシミュレーション結果は、610 kSa/sという低速の組み込みプロセッサの波形を使用して得られたものです。 図14 (b)は、最新のARMプロセッサの波形を10MSa/sのサンプリングレートで使用した結果を示しています。図14(a)では入力信号のSNRが低いにもかかわらず、FIRタップ数の増加とノイズ帯域幅の縮小により、整合フィルタの出力SNRが図14(b)を上回っていることが分かります。高速波形キャプチャ時に正確なトリガリングを確保するには、プリアンプの組み込みが不可欠です[4]。さらに、MCCを使用することで、整合出力の電力(オレンジ色)を利用して検出精度を向上させることも容易に実現できます。

フィギュア 14: 整合フィルタ出力によってトリガーされたオシロスコープ(青)。FIR遅延入力信号(赤)。整合フィルタ出力のパワー(オレンジ)。
製品概要
このアプリケーションノートでは、既知波形の到着時刻検出に最適な受信フィルタとして整合フィルタを用いることを理論的かつ実証的に裏付ける証拠を提示します。導入された概念を検証するため、Moku:Proのマルチインストゥルメントモード、任意波形発生器、FIRフィルタビルダーを用いて、信号の送信と検出を行う一連の実験を行いました。さらに、本研究では、通信、レーダーパルス圧縮、波形トリガーといった分野における整合フィルタの適用例を検証し、信号処理におけるその有効性を明らかにします。得られた結果は、Moku:Proが大きなノイズ電力が存在する場合でも、受信イベントをリアルタイムで確実に検出できることを実証しています。
参考情報
【1] BP LathiとZ. Ding著『現代のデジタル・アナログ通信システム』(国際版、オックスフォード電気・コンピュータ工学シリーズ第4版)。ニューヨーク・オックスフォード:オックスフォード大学出版局、2010年。
【2] MA Richards著『レーダー信号処理の基礎』第2022版。ニューヨーク:McGraw Hill、XNUMX年。
【3]BR Mahafza、「Matlab® を使用したレーダー システムの分析と設計」、第 3 版。
[4] A. Beckers、J. Balasch、B. Gierlichs、I. Verbauwhede、「波形マッチングベースのトリガーシステムの設計と実装」、Constructive Side-Channel Analysis and Secure Design、F.-X. Standaert および E. Oswald 編、Lecture Notes in Computer Science、vol. 9689。Cham: Springer International Publishing、2016 年、pp. 184–198。doi: 10.1007/978-3-319-43283-0_11。
マッチドフィルタの紹介
通信およびレーダー システムの信号対雑音比 (SNR) を改善することは、検出精度を高めるための重要な要件です。整合フィルタは、対象の波形の形状がわかっている場合に SNR 性能を向上させるために広く使用されている技術です。これは、周波数領域で定義された通過帯域および/または阻止帯域を備えた従来のフィルターや、時間領域の要素を排除することを目的としたボックスカー アベレージャとは対照的です。
このアプリケーション ノートでは、マッチド フィルターの背後にある理論について詳しく説明します。さらに、Moku:Pro でのマッチド フィルターの 2 つのアプリケーションをデモします。
経歴
マッチドフィルタリングは、入力信号が既知のテンプレートに「一致する」場合に高出力を提供します。簡単な例として、既知の周波数の正弦波のサイクルと一致するマッチドフィルタを設計します。このフィルタは、入力信号にその周波数の正弦波が存在する場合は常に高出力を提供し、その結果、単純な オンオフキーイング (OOK) デジタル通信受信機。
この構成での整合フィルタリングの有効性を実証するために、次のシミュレーションを実施しました。 図1システムのネイティブSNRは-3.01dBでしたが、整合フィルタを導入することで18.74dBまで大幅に改善されました。この結果は、送信電力を増加させることなくSNR性能を向上させる整合フィルタの有効性を示しています。
図1: 整合フィルタの有効性のデモンストレーション。(a): 010110 というデータを持つノイズのない送信信号、(b): 大きな加法性ホワイトノイズを含む受信信号。通常の復号アルゴリズムではビットを復号できません。(c): ノイズのない送信信号の整合フィルタ出力、(d): ノイズのある受信信号の整合フィルタ出力。理想的なチャネルとノイズのあるチャネルの両方で、すべての変調ビットが正しく復号されています。
整合フィルタの導出
連続信号に基づく導出
フィルタリングされた受信信号の従来の信号モデルは式2.1.1で表される。 y(t) は受信信号を示します。 p(t) 送信信号を表し、 h(t) 受信信号の信号対雑音比を最適化するように設計された受信フィルタを表す。チャネルにおける加法性雑音の存在は次のように表される。 n(t)さらに、処理された信号とノイズはそれぞれpotとno(t)で表されます。
パーシヴァルの法則[1]は、時間領域の信号パワーとノイズの合計パワーが周波数領域の対応するパワーと等しいと述べています。さらに、 通常、パワー スペクトル密度 (PSD) を伴う加法性ホワイト ノイズであると想定されます。 周波数に依存しないこと。この基本原則に従って、期待されるパワーは、 は時間的に一定で、期待される力は です。 は時間的に一定で、期待される力は です。 ノイズ信号の PSD を乗算した結果 および受信フィルターの PSD
受信信号のパワー 当時の サンプリング時間によって異なります これは、送信信号の PSD が時間不変ではない性質があるためです。 PSD は次によって与えられます。 。そのような:
したがって、SNR は 示される 次のように表すことができます。
式 2.1.3 を解き、最適化された SNR の条件を見つけるために、Cauchy-Schwarz 不等式を適用します。既知の送信信号の SNR パフォーマンスを最大化する条件を式 2.1.4 に示します。
そして、導出された最適なフィルター、すなわち整合フィルターは式 2.1.5 で与えられます。
場所 の三脚と 信号の長さです。の選択 カジュアルでありながら最短遅延のフィルターを実現します。さらに、定数乗数 ノイズとシングルを均等にスケーリングするため、分析から省略できます。
デジタルシステムへの拡張
式 2.1.5 の式は、連続時間における最適なフィルターです。定量的な比較を行うために、離散時間デジタル システムの SNR パフォーマンスを分析します。
式 2.2.1 では、整合フィルターの長さは次のようになります。 予想されるノイズ電力は 。この式では、デジタル化されたチャネル ノイズが考慮されます。 、フィルタリングされたノイズと一致 、およびマッチドフィルターのインパルス応答
の一番右の部分 式 2.2.1 の は、ホワイト ノイズの相関関係です。式 2.2.2 は、次の場合にのみノイズ電力がゼロ以外の値を持つことを示しています。 。デジタル化されたマッチドフィルター は式 2.1.5 から導出されます。 整合フィルタリング後のノイズは式 2.2.3 に示されます。
整合フィルタ出力のピーク電力は、式 2.2.4 で与えられます。整合フィルタのインパルス応答は次のように変化するため、整合フィルタの出力ピーク電力は送信パルスのエネルギーの XNUMX 乗です。 は時間反転送信パルスです
したがって、出力信号のピークにおける SNR は式 2.2.5 の式になります。送信信号のパワーは次の式で与えられることに注意してください。 ノイズ電力は次の式で与えられます。
SNRの改善率は、導入部のシミュレーションにおけるSNRの増加と一致しています。このシミュレーションでは、21.75サンプルのフィルタで150dBのSNRの改善が見られ、定量分析では次のようになります。 強化。
整合フィルタの応用
このセクションでは、マッチド フィルタの 2 つのアプリケーションであるレーダー距離センシング (パルス圧縮) と波形トリガーについて紹介し、説明します。
レーダーパルス圧縮
最初の例では、レーダー パルス圧縮を調べます。レーダー システムでは、送信機がターゲットに向けて電波のバーストを放射します。次に、レーダー受信機は、ターゲットによって反射された反射エコーを受信します。飛行時間、つまり距離遅延により、ターゲットまでの距離を計算できます。
このアプリケーションは、図1に示す通信の例と類似しています。レーダーシステムと通信システムはどちらも、ノイズの多い受信環境で信号を検出するように設計されているからです。整合フィルタを備えていない従来のレーダーでは、効果的に動作させるには高い送信電力が必要であり、距離分解能は送信パルスの長さによって大きく制限されます。
この問題に対処するには、整合フィルタを使用して受信パルスを時間内に圧縮します。フィルターからの狭いパルス出力により最高の空間分解能が得られますが、実際の送信信号は広いままで送信エネルギーが増加するため、高出力を必要とせずに SNR を高めることができます。具体的には、チャープ (周波数が線形に増加する正弦波) は、自己相関が狭く、生成が比較的簡単であるため、送信信号としてよく使用されます。
理論と導出
リチャーズ[2]はチャープ波の複素包絡線の曖昧性関数を規定する式3.1.1を導出した。 はチャープの帯域幅を表し、 τ はチャープ波の時間幅を表します。
レーダーの距離分解能は、ピークと最初のヌル ポイントの間の距離であるレイリー分解能によって決まります。のピーク で観察されています 、分子の引数が次の場合に最初の null が発生します。 、つまり、 。 のために 、この式は式 3.1.2 として表すことができます。
根は次のように表現できます。 。負の符号を選択すると、中心点に最も近い正の根が得られます。 、それによって時間領域のレイリー分解能が決定されます。この結果は、式 3.1.3 の平方根のテイラー級数展開で簡略化できます。
したがって、レイリー分解能は時間内に 約です 秒。対応するレイリー距離分解能は次のとおりです。 式 3.1.4 のメートルは、送信信号の往復により XNUMX 倍になります。
注意すべき重要な点は、Moku:Pro のような任意波形発生器 (AWG) は、複雑なエンベロープではなく、チャープ波の実数成分のみを生成するということです。これにより、複素包絡線と正弦波関数のあいまいさ関数に発散が生じます。
前に概説した曖昧さ関数は受信信号の複素エンベロープに基づいていますが、簡単にするためにヒルベルト変換は含まれていません。複雑なエンベロープの詳細な説明と関連する議論については、Mahafza[3]を参照してください。
実数値の正弦波チャープ波のあいまいさ関数の導出は、フレネル積分と三角恒等式の操作を伴うため、困難です。代わりに、単純で変調されていない複素指数波の場合を調べることによって、実数成分のみを使用した場合の効果を説明します。
単純な非変調複素指数関数の複素包絡線の整合フィルタリング方程式は、次のように表すことができます。
式 3.1.5 は、複素指数曖昧性関数のヌルが実部と虚部の結合ヌルであることを示しています。の大きさ の三脚と 時間オフセットτがゼロのときに最大となるが、 の三脚と τの期間後に最大となる(すなわち、 ラジアン)、実部のヌルに対応します 。その結果、実数と虚数のヌルとピークの不整合により、曖昧性関数のヌルの半分がキャンセルされます。虚数成分を削除すると、これらのキャンセルが削除され、NULL の数が 2 倍になります。
直感に反して、レイリー分解能は、完全な複素エンベロープと比較して、実関数では約 2 倍向上します。複素指数を使用したこの図は、シミュレーションで検証されたように、元のチャープ波に適用できる一般的な結果です (図 XNUMX)。純粋な実波形を使用した更新されたレイリー時間分解能と距離分解能の値は、次のようになります。
図2: 受信した実数値チャープの曖昧性関数の比較 および受信信号の複素エンベロープ (青)。
レイリー解像度 時間内のレーダーの最小解像度を決定します。図 3 (a) は、正確に分離された XNUMX つのチャープの整合フィルタ出力を示しています。 建設的に重なり合うと、上部が平らになります。ピーク検出器は単一のピークとして識別します。理論的には、ターゲットがこれ以上離れている場合、小さなディップが予想され、分離が成功します。ただし、実際のアプリケーションでは、小さなディップがノイズによって隠蔽される可能性があり、2 つのパルスを確実に区別できるようになる前に、パルス間でフィルタ出力が名目上ゼロに低下することが要求されるのが一般的です。そのため、このアプリケーション ノートでは、null-to-null 幅のデモンストレーションに焦点を当てます。 .
図3: (a): の距離で建設的にオーバーラップした整合フィルタ出力 、(b): マッチドフィルター出力 分離は名目上、パルス間でゼロに低下します。騒がしい環境でも、それらを明確に区別できる可能性が向上します。
Moku:Pro によるパルス圧縮
導入部で説明した単純なオン/オフキー付き正弦波を用いたシミュレーションとは対照的に、本節のシミュレーションでは、より優れたレイリー距離分解能を実現するために、広い帯域幅を持つ正弦波チャープ波を使用しています。図4は、チャープ波のメインローブ幅が正弦波パルスに比べて狭いことを示しています。
フィギュア 4: (ac) 導入部の OOK 正弦波と同じシミュレーションを、代わりにチャープを使用して実行します。 (d) チャープからの整合フィルター出力 (オレンジ) は、圧倒的なチャネル ノイズが存在する場合でも、正弦波 (青) よりもメイン ローブ幅がはるかに小さくなります。
次のセクションの検証に使用される Moku:Pro マルチ機器モードの構成を次の図に示します。 図5。このセットアップでは、任意波形発生器 (AWG) が 2 つの異なるチャープ波を生成し、チャネル B の帯域幅がチャネル A の半分になります。 FIR フィルター ビルダー (FIR) を使用して、生成されたチャープ波の整合フィルターを実装します。 AWG。その結果、チャネル B 出力のレイリー分解能はチャネル A の半分になることが予想されます。
フィギュア 5: Moku:Pro マルチインストゥルメント モード構成はテストと検証に使用されます。
AWG を使用して、方程式波形タイプを使用してチャープ波を定義します。定義式を式 3.1.7 に示します。
フィギュア 6: AWG で生成されたチャープ波、チャンネル A (赤) はチャンネル B (青) の帯域幅の 2 倍です。
AWGは、200 Hzの繰り返し周波数とパルス変調によりチャープ波形を生成し、チャープパルスを生成しました。チャンネルAのチャープ波形の等価帯域幅は40,000 Hzです。したがって、チャンネルAとチャンネルBを組み合わせた波形の最小ヌル間幅2Δ𝑡は次の式で表されます。
FIR フィルターは、式 (3.1.10) に従って、チャープ波の値を時間的に反転した値を持つカーネルをロードすることにより、整合フィルターとして構成されました。 FIR フィルターの設定を以下に示します。 図7。入力チャープ波の幅とサンプリング周期によってフィルター係数の数が決まります。
AWG 波形と FIR フィルター カーネルの長さは同じで、カーネルは生成された波形と同じ形状を共有します。したがって、チャネル A の FIR フィルターの方程式は、方程式 3.1.10 のように書くことができます。
フィギュア 7: FIR フィルター ビルダー チャネル A の構成。
これで、AWG と FIR でそれぞれ送信波形生成と整合フィルタリングが設定され、パルス圧縮の効果を調べることができます。赤い曲線はチャンネル A の整合フィルターの出力を示し、青い曲線はチャンネル B の出力を示します。青い曲線の幅は赤い曲線の 3.1.8 倍であり、以前の結果が裏付けられ、時間分解能が高いことが証明されています。フィルター出力は帯域幅に反比例します。最初の XNUMX つのヌル間の距離は、式 XNUMX の定理と一致します。
フィギュア 8: Moku:Pro に基づくパルス圧縮実験。赤い曲線は青い曲線の帯域幅の 1 倍の帯域幅を持ち、赤い曲線の距離分解能は青い曲線の 2/XNUMX です。
ここまでで理論とシミュレーションは完了です。次のステップは、実ノイズを含むチャープパルスに整合フィルタを適用することです。図10に示す結果は、整合フィルタが大きなノイズ電力(-73.98 dBm)と小さな信号電力(-93.46 dBm)に対して良好な性能を示していることを示しています。
フィギュア 9: ノイズ環境でのチャープ整合フィルタの実験セットアップ。
フィギュア 10: マッチドフィルタに入力される受信信号のパワー(青)とマッチドフィルタ出力(赤)。整合フィルタ出力電力のスパイクは、受信信号では肉眼では見えないにもかかわらず、チャープの到着時間を明確に示しています。
図8の解析から、パルス圧縮の興味深い特性が明らかになる。より広い帯域幅を持つチャープ波に対する整合フィルタの出力は、最小ヌル間幅が25μs、パルス幅が5msである。したがって、整合フィルタは、25μsを超える時間間隔で重なり合うXNUMXつの反射チャープ波を区別することができる。 図11および12 Moku:Pro の実験結果を表示します。 図11 は、ノイズのない検証の実行を示しています。2 つの重複するチャープが青で示され、整合フィルターの出力が赤で示されています。 図12 同じ実験ですが、チャープ信号がノイズの多いチャネルで受信されたことを示しています。どちらの場合も、25つのチャープ信号の到着時刻は明確に区別されており、XNUMXマイクロ秒間隔であることが正確に検出されています。ただし、アンビギュイティ関数に非ゼロのサイドローブが存在するため、検出された時間間隔は送信された時間間隔とわずかに異なる可能性があることに留意してください。
フィギュア 11: 同じ帯域幅と時間幅を持ち、25マイクロ秒のオフセットを持つ25つの重なり合うチャープパルス(青)。整合フィルタ出力は、チャープ間のXNUMXマイクロ秒の時間を正しく復元します(赤)。
フィギュア 12: 2 つの重なり合うチャープ波の整合フィルタ出力 (赤) と、フィルタリング前の受信信号 (青) の比較。
波形トリガ
オシロスコープの一般的な機能であるデジタル パターン トリガには、受信したデジタル信号に対して論理演算を実行し、特定のパターンに基づいてオシロスコープをトリガすることが含まれます。たとえば、デジタル信号の下位 8 ビットが High の場合にのみトリガするようにオシロスコープを設定できます。この機能は、さまざまなシナリオにおけるデジタル システムの動作を分析するために重要です。
ただし、チップ障害挿入やサイドチャネル解析などのアプリケーションでは、通常、信号は無線周波数受信機から収集されるため、高レベルのノイズと低い信号振幅が発生する可能性があります。このような場合、デジタル パターン トリガにより多数の誤警報が発生し、チップの動作に関する誤った情報が与えられる可能性があります。
デジタル パターン トリガーの問題に対処する 1 つの解決策は、波形トリガーを使用することです。波形トリガでは、整合フィルタを使用して入力アナログ信号を予想波形と継続的に比較し、予想波形が表示されたときにトリガー イベントを生成します。
従来のオシロスコープは、このような波形トリガに対して十分な柔軟性を備えておらず、代わりに専用の「トリガ ボックス」[4]が必要です。一方、マルチ計測器モードを備えた Moku:Pro を使用すると、FIR フィルター ビルダーとオシロスコープ計測器を同時に展開して、波形トリガとオシロスコープ測定を行うことができます。の波形 図13 これはBeckersら[4]の論文を再現したもので、マイクロプロセッサがAdvanced Encryption Standard(AES)を用いてデータパケットをエンコードする際に捕捉された電源レールの異常を示しています。このような動作の検出は、フォールトインジェクション攻撃の実行や、後の分析のための補助データの採取に利用できます。
なお、Beckersら[4]は、トリガーアルゴリズムの前にエンベロープ検出器を配置することで結果を改善しました。Moku:Proでは、Moku Cloud Compile(MCC)を使用して簡単なカスタムロジックを構築し、FIR機器の前に配置することで、同様の操作を実行できます。
フィギュア 13: AES 単一実行パターン
波形トリガがサンプリングと補助データの記録を開始する場合、ユーザーはオシロスコープで表示されるトリガ イベントが発生することを好む場合があります。 start 一致した波形の終わりではなく、その波形の部分です。この場合、追加の FIR フィルター チャネルを「オールパス」構成でセットアップし、整合フィルターの長さに等しい純粋な時間遅延を導入することができます。
図14は、オシロスコープ(青)に表示されるFIRフィルタビルダによるトリガ信号の生成が成功したことを示しています。さらに、FIRフィルタビルダはフィルタ処理されていない入力信号を正確に遅延させているため、トリガ波形全体をキャプチャして後で検証することができます。図14(a)に示すシミュレーション結果は、610 kSa/sという低速の組み込みプロセッサの波形を使用して得られたものです。 図14 (b)は、最新のARMプロセッサの波形を10MSa/sのサンプリングレートで使用した結果を示しています。図14(a)では入力信号のSNRが低いにもかかわらず、FIRタップ数の増加とノイズ帯域幅の縮小により、整合フィルタの出力SNRが図14(b)を上回っていることが分かります。高速波形キャプチャ時に正確なトリガリングを確保するには、プリアンプの組み込みが不可欠です[4]。さらに、MCCを使用することで、整合出力の電力(オレンジ色)を利用して検出精度を向上させることも容易に実現できます。
フィギュア 14: 整合フィルタ出力によってトリガーされたオシロスコープ(青)。FIR遅延入力信号(赤)。整合フィルタ出力のパワー(オレンジ)。
製品概要
このアプリケーションノートでは、既知波形の到着時刻検出に最適な受信フィルタとして整合フィルタを用いることを理論的かつ実証的に裏付ける証拠を提示します。導入された概念を検証するため、Moku:Proのマルチインストゥルメントモード、任意波形発生器、FIRフィルタビルダーを用いて信号の送信と検出を行う一連の実験を行いました。さらに、本研究では通信、レーダーパルス圧縮、波形トリガーといった分野における整合フィルタの適用例を検証し、信号処理におけるその有効性を明らかにします。得られた結果は、Moku:Proが大きなノイズ電力下でも受信イベントをリアルタイムで確実に検出できることを実証しています。
参考情報
【1] BP LathiとZ. Ding著『現代のデジタル・アナログ通信システム』(国際版、オックスフォード電気・コンピュータ工学シリーズ第4版)。ニューヨーク・オックスフォード:オックスフォード大学出版局、2010年。
【2] MA Richards著『レーダー信号処理の基礎』第2022版。ニューヨーク:McGraw Hill、XNUMX年。
【3]BR Mahafza、「Matlab® を使用したレーダー システムの分析と設計」、第 3 版。
[4] A. Beckers、J. Balasch、B. Gierlichs、I. Verbauwhede、「波形マッチングベースのトリガーシステムの設計と実装」、Constructive Side-Channel Analysis and Secure Design、F.-X. Standaert および E. Oswald 編、Lecture Notes in Computer Science、vol. 9689。Cham: Springer International Publishing、2016 年、pp. 184–198。doi: 10.1007/978-3-319-43283-0_11。

