



リアルタイムの共振トラッキングは、マイクロエレクトロメカニカルシステム (MEMS) ベースの慣性センシングから原子間力顕微鏡 (AFM) まで、さまざまなアプリケーションで重要です。このアプリケーション ノートでは、位相ロック ループ (PLL) を使用する方法と、デュアル周波数共振トラッキング (DFRT) を使用する方法の 2 つの共振トラッキング方法を比較します。PLL 方法はほとんどの状況でうまく機能しますが、臨界結合下で発生する急激な位相シフトには対応できません。DFRT は、振幅依存のフィードバック制御でこの困難を克服し、より信頼性の高いソリューションを提供します。
ここでは、デュアル ロックインアンプ フォルダーとその下に PIDコントローラー シングルで Moku:Pro デバイス。2チャンネルの 波形発生器シミュレーションされた共振器でテストされ、PLL 方式の信頼性が低い状況でのこの技術の有用性を実証する肯定的な結果が得られました。
イントロダクション
共振トラッキングを実現するための2つの主要な技術は、PLL法とDFRTです。PLLアプローチは、駆動信号とシステムの応答の位相差を監視することに依存しています。一定の位相差を維持することにより、駆動信号は共振周波数にロックされ、これは次のような場合に便利です。 MEMS共振トラッキング図 1 は、Moku ロックイン アンプ、PID コントローラ、波形ジェネレータで構成される共振追跡用 PLL システムのブロック図を示しています。特に、Moku ロックイン アンプには PID 機能が組み込まれており、追加の計測機器なしで共振追跡が可能です。
ロックイン アンプは、駆動信号を基準として応答信号を復調し、2 つの信号間の位相差を決定します。次に、この位相差がターゲット位相オフセットと比較され、結果として得られるエラー信号が PID コントローラによって処理されます。PID コントローラは周波数調整信号を生成し、波形ジェネレータを調整して共振周波数を継続的に追跡します。
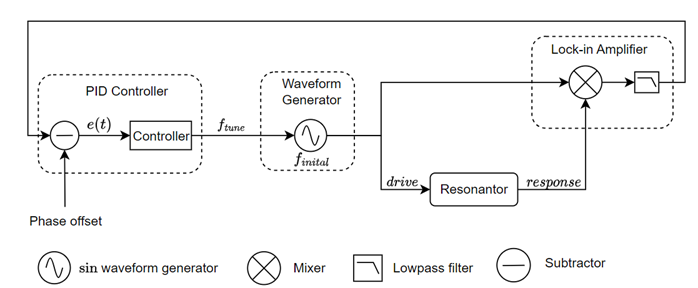
図1:PLLは駆動信号と応答信号の位相差を検出し、その位相差をPIDコントローラに送信します。PIDコントローラは制御信号を生成します。 𝒇𝒕𝒖𝒏𝒆波形ジェネレーターを調整して周波数を調整し、共振周波数を追跡します。
PLLシステムを効果的に動作させるには、駆動周波数が変化しても駆動信号と応答信号の間に連続的な位相関係が保たれる必要があります。そのため、PLLは、通常オーバーカップリングモードで動作するMEMSジャイロスコープや、特定のAFMに適しています。 マイクロカンチレバーセンサー 結合不足の条件で機能する。しかし、その性能は臨界結合条件では制限される。この場合、周波数を掃引すると \(f_{res}^-\) 〜へ \(f_{res}^+\)共振時に突然180°の位相シフトが発生します。この急激な変化はトラッキングプロセスを妨害し、発振を引き起こす可能性があります。このような事例はまれですが、発生すると大きな問題を引き起こす可能性があります。
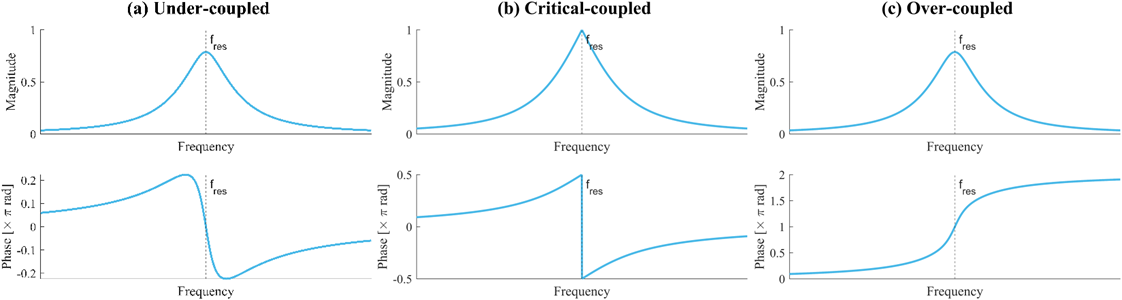
図2:共振挙動は、アンダーカップリング、クリティカルカップリング、オーバーカップリングの180つの結合条件に分類できます。アンダーカップリング条件とオーバーカップリング条件のどちらにおいても、共振周波数 \(text{(}f_{res}text{)}\) 付近の位相変化は線形かつ連続的です。クリティカルカップリング条件では、\(f_{res}\) 付近でXNUMX°の位相シフトが観測されます。共振特性は、マイクロリング共振器結合システムのシミュレーションから導出されています。
さらに、AFM アプリケーションで信頼性の高い PLL 機能を実現するには、カンチレバーのスキャン中にシステムの位相応答が共振器周波数で安定している必要があります。PLL は固定の位相差しか維持できないため、この安定性は非常に重要です。共振器周波数での位相応答が変化すると、共振器周波数の追跡でエラーが発生する可能性があります。ただし、ピエゾ応答力顕微鏡など、特定の条件下では、これを実現できない場合があります。ピエゾ応答力顕微鏡では、カンチレバーの偏向信号が、駆動電界に対する分極アライメントに基づいて、反対方向のドメイン間で 180° の位相反転を示します。位相応答が安定していないため、PLL 方式では正しい共振周波数を追跡できません。そのため、異なる材料をスキャンしている間に位相と周波数のマッピング関係が変化するため、追跡された共振周波数は正しい周波数ではありません。例えば、磁壁の両側において、片側は共振周波数において90°の位相差を持ちますが、もう片側は-90°の共振周波数を持ちます。これらの課題に対処するには、DFRTなどの代替的な共振追跡技術が必要になります。
デュアル周波数共振トラッキング
効果的な PID 制御には、中心共振周波数の両側でエラー信号が反対の符号を示すことが必要です。これは、対称信号を微分し、正確なフィードバック制御に必要な符号変更を伴う反対称形式に変換することで実現できます。図 3 は、AFM マイクロカンチレバーセンサーの元の振幅応答と微分された振幅応答の比較を示しています。元の振幅応答を調べると、単独の振幅測定から共振周波数 (\(f_{res}\)) に対する現在の周波数を決定することはできません。単一の振幅値は、\(f_{res}\) の両側に XNUMX つずつ、XNUMX つの異なる周波数値に対応します。対照的に、微分応答はこの曖昧さを解決します。周波数が \(f_{res}\) 未満の左側では、微分された振幅値は正であり、周波数が \(f_{res}\) を超える右側では、値は負です。この区別により、PID 制御のより正確な共振追跡が可能になります。
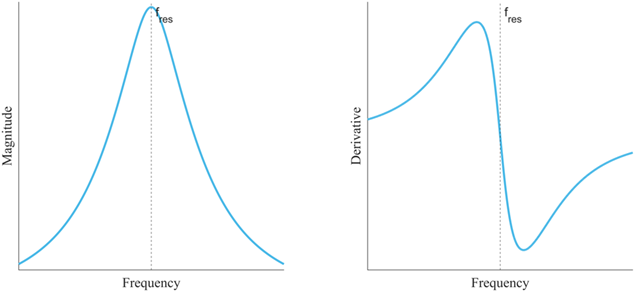
図 3: 元の共振器の振幅応答 (左) は対称です。対照的に、その導関数 (右) は、共振の両側で反対の符号を持つ反対称の振幅プロファイルを生成するため、フィードバック制御に最適です。
同様に、デュアル周波数共振トラッキングは、微分と類似の原理で動作しますが、微分ステップ サイズは \(f_2 – f_1\) に固定されています。デュアル周波数トラッキングの概念を図 4 に示します。1 つのトーンの振幅は、共振周波数への近さによって決まります。\(f_2\) が \(f_1\) よりも共振周波数に近い場合、\(f_2\) トーンの振幅は \(f_1\) より大きくなり、その逆も同様です。したがって、\(f_2\) と \(f_5\) の中心周波数を移動して、中心を共振周波数に一致させることが鍵となります。説明図を図 2 に示します。結果として、中心周波数 \(frac{f_1 + f_2}{XNUMX}\) が \(f_{res}\) と揃うと、エラー信号はゼロのままになります。
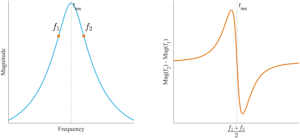
図4: 共振振幅応答は中心周波数を中心に対称です。周波数\(f_1\)と\(f_2\)は、一定の周波数差\(f_2 – f_1\)と可変の中心周波数\(frac{f_2 + f_1}{2}\)で隔てられています。誤差信号は、XNUMXつの周波数成分の振幅を減算することで得られます。
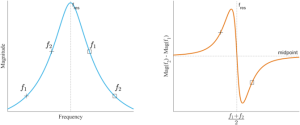
図5:この図は2つのシナリオを示しています。「+」は、中心周波数\(frac{f_1 + f_2}{2}\)が共振器周波数\(f_{res}\)よりも低い場合を示しています。逆に、「☐」は、中心周波数が\(f_{res}\)を超える場合を示しています。結果として得られる応答\(f_1 – f_XNUMX\)は、中心周波数より上に「+」、中心周波数より下に「☐」を示します。したがって、PIDコントローラは必要に応じて中心周波数を共振器周波数に合わせることができます。
Moku:Proでの実装
ツー ロックインアンプ 入力信号の 6 つの周波数成分の振幅を検出するには、PID コントローラが減算を実行してシステムを安定化させる必要があります。デュアル周波数共振追跡の原理を図 XNUMX に示します。このセットアップでは、波形ジェネレータを使用して XNUMX つの正弦波形が生成され、信号コンバイナを介して結合されてから共振器に適用されます。次に、XNUMX つの周波数トーンの振幅が測定され、PID コントローラに送られて共振追跡が可能になります。
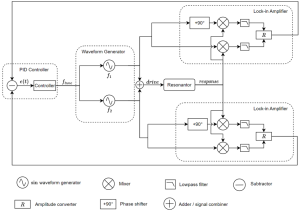
図6:デュアル周波数共振追跡装置のブロック図。1つの周波数成分\(f_2\)と\(f_XNUMX\)は、独立した正弦波発生器によって生成され、アナログ信号合成器によって合成された後、共振器に送られます。両方の周波数成分はデュアル位相復調器によって復調され、各トーンの振幅が計算されます。XNUMXつの振幅の差\(e(t)\)は、周波数調整と共振追跡のためにPIDコントローラに送られます。
図7はDFRTの実装を示している。 マルチインストゥルメントモード on Moku:Proこのセットアップでは、1つのロックインアンプ(スロット2とスロット3にそれぞれXNUMXつずつ)を使用して、XNUMXつの周波数成分の振幅を測定します。振幅信号はスロットXNUMXのPIDコントローラに送られ、フィードバック制御信号が生成されます。この制御信号は、 波形発生器これにより、中心周波数を調整し、共振を効果的に追跡することができます。波形発生器の2つのチャンネルは、それぞれ2つのロックインアンプにリファレンス信号として送られます。

図 7: 共振トラッキング用に構成された Moku:Pro。XNUMX チャンネル波形ジェネレーターは周波数変調正弦波ジェネレーターとして設定され、PID コントローラーの制御信号を使用して中心周波数を調整します。エラー信号は、XNUMX つのロックイン アンプの出力を減算することによって生成されます。
波形発生器の構成を図8に示します。波形発生器は、10MHzと11MHzに設定された別々のチャネルを使用して1つの周波数成分を生成し、それらの周波数差は2MHz(\(f_1 – f_1 = 1\)MHz)となります。両チャネルの周波数変調度は1MHz/Vで、同じ入力信号(入力A)によって変調されます。これにより、両チャネルが均等に変調され、XNUMXMHzの周波数差が維持されます。これらのXNUMXつの信号はXNUMXつのロックインアンプに送られ、共振器からの応答信号を復調するための基準信号として使用されます。
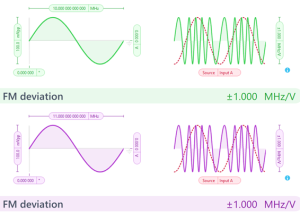
図8:10チャンネル波形発生器は、11MHzと1MHzの正弦波発生器で構成されています。両チャンネルの周波数変調度はXNUMXMHz/Vに設定されており、両方のトーンの変調が一定に保たれます。
ロックインアンプ(両方とも同一構成)の構成を図 9 に示します。ロックインアンプは、In-B で受信した信号(波形発生器出力)に局部発振器をロックする内部 PLL を備えています。ロックインアンプの PLL は復調基準の生成にのみ使用され、共振器周波数のトラッキングには寄与しません。隣接周波数成分からの干渉を低減するため、ロックインアンプのローパスフィルタは 100 dB/オクターブのスロープで 18 Hz に設定されています。特に、ローパスフィルタのコーナー周波数は、実験における AFM のスキャン速度または信号帯域幅に合わせて調整する必要があります。スキャン速度がフィルタの応答時間を超えると、振幅と共振器周波数の遷移を正確にトラッキングできない場合があります。ロックインアンプは、In-A 信号(共振器応答)の対応する周波数成分の振幅を測定し、その結果を Out-A から出力します。

図9:ロックインアンプの構成。復調基準は波形発生器の出力から直接生成されます。ローパスフィルタは、100Hzのコーナー周波数と18dB/オクターブのロールオフに設定されています。In-Aの振幅(共振器の応答で測定されたトーン)はOut-Aに送られます。
エラー信号は、2つのロックインアンプの出力を減算することで得られ、この操作は、 PIDコントローラー (図10参照)。誤差信号を最小限に抑えるため、PIDコントローラは比例積分(PI)コントローラとして構成されています。積分器はDC誤差信号を除去します。積分器のゼロクロスポイントは、実験要件に合わせて調整できます。積分器のクロスオーバー周波数を上げると共振追従速度は速くなりますが、位相余裕が減少し、不要なオーバーシュートや振動が発生する可能性があります。

図10:制御マトリックス(In-B – In-A)によって誤差信号が生成され、PIDコントローラに送られます。PIDコントローラは、比例ゲインが-12.7 dB、積分器のクロスオーバー周波数が50.33 Hzに設定されています。
この実験では、可変中心周波数のバンドパス フィルタを使用して共振器をシミュレートし、フィルタの中心周波数に応じて 11 つの周波数トーンの振幅を変化させます。デバイスの接続と FIR フィルタの構成は、それぞれ図 12 と XNUMX に示されています。FIR フィルタの中心周波数は、DFRT のパフォーマンスを評価するために調整されます。
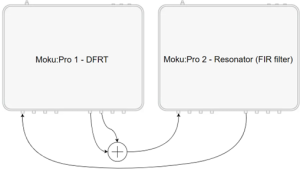
図11:デバイスとBNCケーブルの接続は以下のとおりです。Moku:Pro 1は共振トラッキングに使用され、Moku:Pro 2はFIRフィルターを用いて共振器をシミュレートします。FIRフィルターは、中心周波数が可変のバンドパスフィルターとして構成されています。Moku:Pro 1によって生成されたXNUMXつの周波数トーンは、アナログ信号コンバイナーによって合成されます。
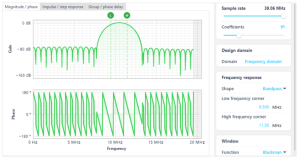
図12:FIRフィルタは、39.06MHzのサンプリングレートと61個の係数を持つバンドパスフィルタとして構成されています。中心周波数は10MHzに設定されており、共振追従性能を評価するために調整可能です。
最終的に、DFRT を使用して共振が正常にロックされました。図 13 に示す PID コントローラーのユーザー インターフェイスには、制御信号出力が表示されます。FIR フィルターの中心周波数は、10.5 MHz ステップで 11.5 MHz から 0.25 MHz に調整されました。PID 出力の各ステップは、約 250 mV の制御信号の変化に対応し、これは 0.25 MHz の周波数変調に変換されます。FIR バンドパス フィルターの応答曲線は中心周波数を中心に完全に対称ではないため、ステップ サイズが 250 mV に正確に一致しないことに注意することが重要です。この不一致は、同様の振幅応答の不規則性を示す可能性のある実際の共振器の動作も反映しています。これは、必要に応じて、PID コントローラーに入力オフセットを導入することで補正できます。
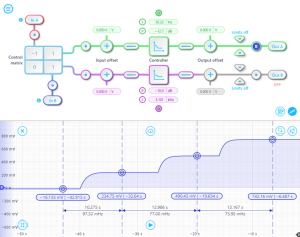
図13:PIDコントローラのユーザーインターフェース。青い線は出力制御信号を示しています。図中のマーカーは制御電圧を示しています。制御信号の各ステップは約250mVで、0.25MHzの周波数調整に相当します。FIRフィルタの不完全な対称性のため、実際のステップサイズは250mVと完全に一致しません。
製品概要
この研究では、MEMS 慣性センサーや原子間力顕微鏡などのアプリケーションに重要な、リアルタイム共振追跡のための 180 つの主要技術、PLL と DFRT を紹介します。PLL アプローチは、駆動信号と応答信号間の位相差を一定に保つことで、過剰結合および不足結合のシステムに適しています。ただし、この方法は、急激な XNUMX° 位相シフトにより追跡が中断される可能性があるため、結合が厳しい状況では課題に直面します。さらに、位相応答がテスト対象の材料の影響を受ける場合は、効果が低くなります。
これに対処するため、DFRTはデュアル周波数信号を用いて共振周波数を決定し、PIDコントローラによる高精度なフィードバック制御を可能にします。Moku:Proに実装されたDRFTは、FIRフィルタでシミュレートされた共振器の周波数偏差を効果的に追跡します。Moku:Pro DFRTは\(f_{res}\)の追跡のみに焦点を当てており、\(f_{res}\)における共振器の振幅応答や位相応答は測定しないことに注意してください。これらの応答特性を取得するには、追加のMokuハードウェアデバイスが必要です。
結果は、DFRT が、共振器の非対称性を補正するリアルタイム調整により、安定した正確な共振追跡を実現することを示しています。これにより、特に重要な結合や材料の変動により PLL 方式のパフォーマンスが損なわれるシナリオでは、DFRT が PLL 方式の実行可能な代替手段として確立されます。振幅応答をエラー信号として利用することで、DFRT はこのような状況での追跡精度と堅牢性を強化します。
参考情報
[1] BJ Rodriguez、C. Callahan、SV Kalinin、R. Proksch、「デュアル周波数共鳴追跡原子間力顕微鏡」 ナノテクノロジー、vol. 18、いいえ。 47、p. 475504、2007 年 XNUMX 月、文書: 10.1088/0957-4484/18/47/475504.

