モク ニューラルネットワーク は、テストおよび測定機器の完全なスイートに統合された唯一のFPGAベースのニューラルネットワークです。この機器を使用すると、ユーザーは、実験セットアップに合わせて、リアルタイムで強力な機械学習アルゴリズムを実行できます。 Moku:Pro. モデルを構築し、トレーニングするには、 Python 、そしてMoku:Proを使用してテストシステムに展開し、低遅延の推論を実現し、変化する実験条件に迅速に対応します。次の例では、 オートエンコーダ パルス波形のノイズを除去するためにニューラルネットワーク構造の一種を適用します。 マッチドフィルター ノイズのないデータ、ノイズのあるデータ、ノイズ除去されたデータに適用し、パルス波形シナリオにおけるニューラル ネットワーク機器の有効性を、マッチド フィルタと比較して強調します。
パルス検出にマッチドフィルタを使用する
パルス波形はさまざまなアプリケーションで広く使用されていますが、レーダー システムはその代表的な例です。最も単純な構成では、パルス レーダーは一定の周波数で短く強力な電磁エネルギー パルスを放射し、ターゲットからのエコーを検出するために「リスニング」モードに入ります。このリスニング期間中、レーダー システムは基本的に沈黙し、環境内の物体からの戻り信号 (エコー) を待ちます。
パルスレーダーシステムにおける主要な課題の1つは、受信信号の減衰から生じます。パルスがレーダーからターゲットまで移動し、戻ってくると、拡散損失が発生し、距離とともに信号が弱くなります。減衰の程度はレーダーとターゲット間の距離の2乗に比例し、この現象はしばしば減衰と呼ばれます。 自由空間経路損失意図的なノイズ(妨害など)や意図しないノイズは、レーダー受信機にとってさらに問題となり、受信波形内のパルスの存在を判別するのが困難になることがあります。パルス検出を支援するために、ノイズの多い波形内のパルスの存在とタイミングを検出する整合フィルタが一般的に採用されています。整合フィルタは、受信信号と畳み込まれた送信パルスの時間反転コピーです。整合フィルタの有効性は、パルスとノイズの両方の特性に大きく依存します。整合フィルタは受信波形内のパルス検出に役立ちますが、一般に信号対雑音比(SNR)が増加するとパフォーマンスが向上します。高度なレーダー システムでは、パルス圧縮、周波数ダイバーシティ、その他の多くの信号処理戦略など、他の技術も採用されており、今後のホワイト ペーパーで紹介される予定です。
ニューラルネットワーク機器によるレーダーデータのシミュレーションとノイズ除去
材料とハードウェア構成
パルスパラメータ
- 搬送周波数 – 2 kHz
- パルス幅 – 5 ms
- パルス繰り返し周波数 – 10 Hz
ユーザーは1回のクリックでパルス波形を生成できます。 Moku:Go 単一計測器モードで実行します。単純なパルス波形を生成するには、チャネル 1 で振幅変調された正弦波をチャネル 2 で生成します。チャネル 2 では、図 1 に示すように、必要な周波数とパルス幅を持つパルス波形を生成することで変調ソースを作成できます。
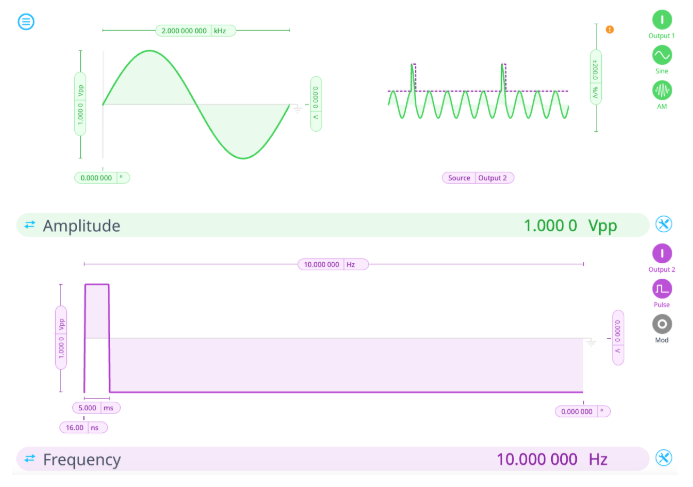
図1: Moku:Go 波形ジェネレータのパルス信号パラメータを使用してパルスレーダー信号をシミュレートする
このパルス波形をMoku:Goの出力1からMoku:Proの入力1に接続します。Moku:Proを次のように設定します。 マルチインストゥルメントモード (図 2) XNUMX つの計器スロットがすべて使用されています。
- スロット1 – 波形発生器 騒音を発生させる
- スロット2 – PIDコントローラー 制御マトリックスを使用してノイズとパルス信号を組み合わせる
- スロット3 – ニューラルネットワーク 以前に構築されたオートエンコーダ *.linn ファイル
- スロット4 – データロガー 0.2秒のスナップショットデータを保存するために使用される
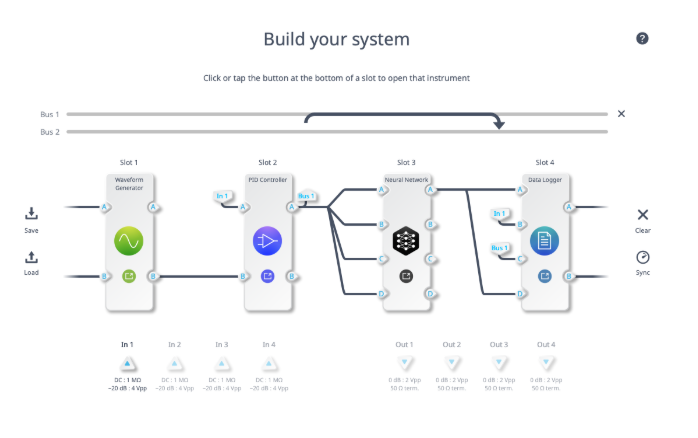
図2: Moku:Pro マルチインストゥルメントモードの構成
この実験では、PIDコントローラはノイズとMoku:Goから受信した信号を組み合わせるためだけに使用します。PIDコントローラには 入力制御マトリックス これにより、3つの別々の入力からの信号をスケーリングして組み合わせることができます。制御マトリックスから適切なスケーリングを適用した後、PIDコントローラーの残りの部分はノイズの多いパルスのパススルーとして機能します。スロットXNUMXには、オートエンコーダニューラルネットワーク構成が含まれています。 オートエンコーダ は、入力データセットの効率的な圧縮表現を学習することを目的としたニューラル ネットワーク構造の一種です。これは、潜在空間表現が小さくなるように徐々に小さくなってから、入力サイズに戻るネットワーク アーキテクチャによって実現されます。オートエンコーダは、一般的に、エンコーダ ネットワークとデコーダ ネットワークの 2 つのネットワークで構成されていると考えられます。エンコーダは入力データの圧縮表現を学習する役割を担い、デコーダは潜在変数表現から入力を再構築する役割を担います。このオートエンコーダに使用されたトレーニング データは、パルス波形ではなく、ランダム ウォーク信号のみで構成されていたことに注意することが重要です。この事実にもかかわらず、ニューラル ネットワークは、SNR のレベルが大幅に低下した場合でも、正確なパルス識別に成功しました。
結果
十分な SNR があれば、整合フィルタは信号内の既知のパルス タイプの正確な位置を識別するための優れたツールです。以下に示すように、ノイズが存在すると信号を視覚的に識別するのは困難ですが、整合フィルタは効果的にこの信号をノイズから取り出すことができます。ただし、ニューラル ネットワーク機器でリアルタイムに処理された信号は整合フィルタのパフォーマンスをさらに向上させ、検出しきい値を低くすることができます。図 3 の垂直の緑のハッシュ線は、相関の予想されるピークを示しています。水平の赤いハッシュ線は、ウィンドウ内のピーク相関の 50% での任意の検出しきい値を示しています。
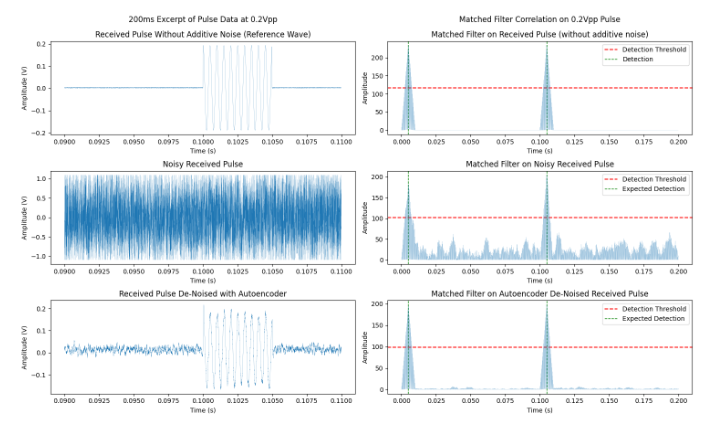
図3: ニューラルネットワークベースのオートエンコーダ(左)とマッチドフィルタ(右)を使用したレーダーパルス検出結果の比較
SNR が低下すると、ノイズの多い信号に対して選択したしきい値で誤検出が発生し始めます。このような状況は、Ω ノイズからの真のパルス リターンを確認することが不可能であるため、受信したレーダー データを解釈しようとする人にとっては困難です。ただし、ニューラル ネットワークを介したノイズ除去された信号により、パルスを完璧に識別でき、図 4 に示すように、検出しきい値を低く抑えることができます。
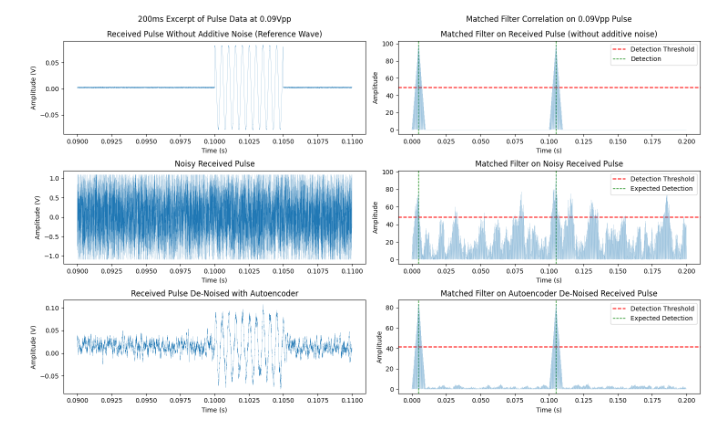
図4: オートエンコーダ(左)と整合フィルタ(右)を使用した0.09 Vpp入力信号によるレーダーパルス検出の比較
図 5 に示すように、SNR がさらに低下すると、整合フィルタがノイズの多い信号内のパルスを検出する能力は完全に失われます。ただし、ニューラル ネットワークを通じてリアルタイムでノイズ除去された信号は、引き続き良好なパフォーマンスを発揮します。
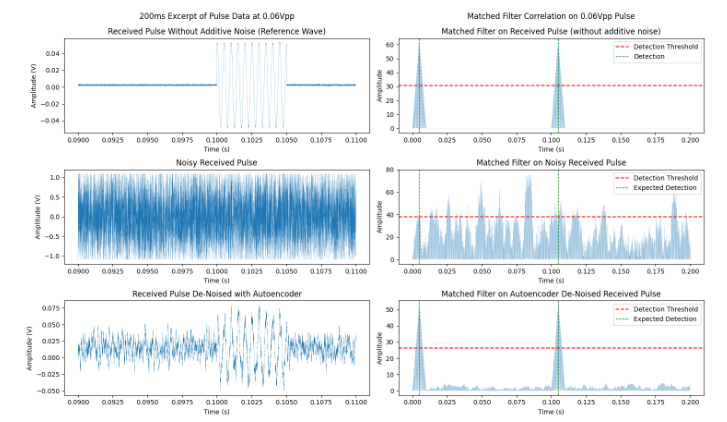
図5: オートエンコーダ(左)と整合フィルタ(右)を使用した0.06 Vpp入力信号のレーダーパルス検出の比較
最終的には、SNR がさらに低下すると、ニューラル ネットワークによるノイズ除去信号のパフォーマンスが制限され始めます。ただし、このノイズ除去技術は、マッチド フィルターのみの場合に比べてパフォーマンスが大幅に向上します。図 6 では、誤検出が見られ始めていますが、真の検出は依然として正確です。
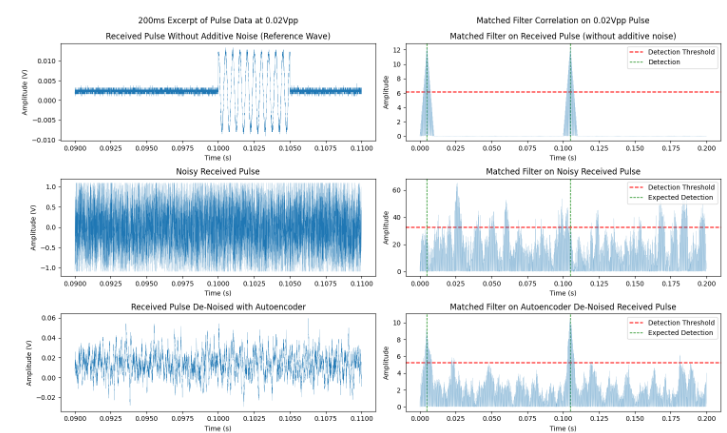
図6: オートエンコーダ(左)と整合フィルタ(右)を使用した0.02 Vpp入力信号におけるレーダーパルス検出の比較
結論
モク これらのデバイスにより、ノイズが存在する状況での脈拍識別の課題を簡単に調査できます。さらに、Moku ハードウェアにはニューラル ネットワークが適用され、リアルタイムでデータのノイズが除去されます。このニューラル ネットワーク構成の興味深い点は、トレーニング データが脈波波形で構成されていないことです。この事実にもかかわらず、ニューラル ネットワークは、SNR レベルが大幅に低下した場合でも、正確な脈拍識別を可能にすることに成功しました。
ご質問がある場合
ナレッジベースのFAQから回答を見つけてください
デバイスの機能や機器の機能について質問がある場合は、当社の広範な情報を確認してください。 ナレッジベース 探している答えを見つけるために。また、人気の記事をすぐに確認したり、製品やトピックごとに検索を絞り込んだりすることもできます。
ユーザーフォーラムに参加してください
新しい機能をリクエストしたいですか?共有できるサポートのヒントがありますか?使用例から新機能の発表など、 ユーザーフォーラム 製品のアップデートだけでなく、Liquid Instruments や当社のグローバル ユーザー コミュニティとのつながりも提供するワンストップ ショップです。