In 第1部 このホワイトペーパーでは、量子計算から磁場センシングまで、様々な用途で利用されている量子ビットと呼ばれる2レベル量子システムについて紹介しました。量子ビットの物理的な実装例をいくつか紹介し、一般的なXNUMXレベル量子システムの構造についても検証しました。
この第2部では、ブロッホ球として知られる量子ビット状態のグラフィカル表現を紹介します。また、このモデルを用いて、Rabi、Ramsey、CPMGといった一般的なパルスシーケンスをMokuなどの再構成可能なハードウェアに実装し、これらの量子ビットから重要な情報を抽出する方法を説明します。
ホワイトペーパー全体をダウンロードして読む こちら.
ブロッホ球
2準位量子系の状態と時間発展を可視化するために、ブロッホ球と呼ばれる便利なツールを導入します。ブロッホ球はもともと古典的な核スピン集団の挙動を記述するために開発されましたが、その後、2準位量子状態を表す標準的な方法となりました。
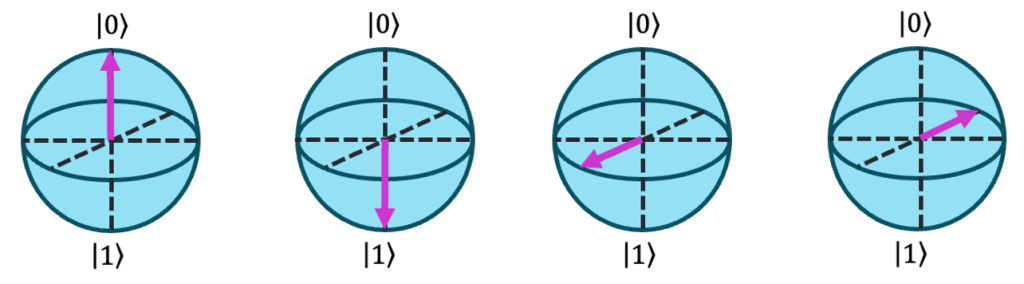
原点からその表面上の一点を指すベクトルを持つ単位球を想像してください。このベクトルは量子ビットの状態に対応します。例えば、古典状態 ∣0⟩ と ∣1⟩ は球の北極と南極(つまり、Z軸上で +1 と -1)に位置し、純粋な重ね合わせ状態はそれらの間のどこかに存在します [3]。図2にいくつかの例を示します。
さて、この表現には小さな落とし穴があります。これらの図は特定の瞬間における量子状態を示していますが、状態がどのように発展していくかを捉えていません。先ほど導出したように、\(\frac{1}{\sqrt{2}} \left( |0 \rangle + | 1 \rangle \right) \) のような重ね合わせ状態は、周波数 \(\omega\) で Z 軸の周りを歳差運動します。これは厄介な問題です。一定の回転によって、長いプロトコルやゲートシーケンスにわたる状態発展を追跡することが困難になる可能性があるからです。
これを解決するために、\(\omega\)で回転する回転座標系への座標変換を行います。この回転座標系では歳差運動が消失するため、定常な重ね合わせは定常のままとなり、ブロッホベクトルは固定されているように見えます。これにより、量子ビットのダイナミクスの解析がはるかに容易になります。
残念ながら、現実世界の量子システムは完全な重ね合わせ状態を永遠に維持するわけではありません。時間の経過とともに、環境との相互作用により量子ビットはコヒーレンスを失い、平衡状態へと緩和します。ブロッホ球面は理想的な孤立した量子ビットの完璧な幾何学的描像を与えますが、現実のシステムは情報を失うにつれて徐々に球面から離れて行きます。統計的不確実性やコヒーレンスの喪失を表すこれらの混合状態は、球面上ではなく、球面内部に存在します。
この動作を特徴付ける重要なタイムスケールが 2 つあります。
T1,war (エネルギー緩和時間): 量子ビットが励起状態∣1⟩から基底状態∣0⟩へと緩和する時間スケール。これにより、ブロッホベクトルは北極に向かって傾きます。
T2 (位相ずれまたはコヒーレンス時間): 環境の変動により、∣0⟩と∣1⟩の相対位相が乱れる時間スケール。これにより、ブロッホベクトルはZ軸に向かって縮小する。これは 本質的な これは、後で導入される \(T^*_2\) によって一般的に表される位相ずれ時間とは区別されます。
これらのプロセスが組み合わさることで、量子ビットの状態は純粋状態(球面上)から混合状態(球面内)へと遷移します。完全にデコヒーレンスが解除されると、量子ビットはもはや有用な量子情報を運ぶことができなくなります。
量子ビットが能動的に駆動されていない場合(次のセクションを参照)、デコヒーレンス/デフェージングが存在するシステムのダイナミクスは、ブロッホ方程式によって記述されます。
\(\frac{dx}{dt} = -\frac{1}{T_2}x\)
\(\frac{dy}{dt} = -\frac{1}{T_2}y\)
\(\frac{dz}{dt} = -\frac{1}{T_1}(z-z_\infty)\)
ここで、x、y、zは状態ベクトルの要素である。xとyは横断面におけるコヒーレンスを表し、zは∣0⟩と∣1⟩の人口差であり、zは∞ = +1 は熱平衡状態(すなわち、∣0⟩ における全量子密度)に対応します。次のセクションでは、外部駆動場を用いて量子ビットをコヒーレントに操作し、ブロッホ球面の異なる軸を中心に回転させることにより、量子プロトコルを実装する方法を示します。
ドライブの追加
センシングであれ計算であれ、あらゆる種類の量子ビットアプリケーションは、コマンドに応じて量子ビットの状態を操作できる必要があります。これにより、ユーザーは量子ビットの品質を(T1 とT2 測定)を行い、より複雑なゲートシーケンスを実行します。これを行うには、伝搬方向がx軸に沿って定義された別の振動電磁場を適用します。この駆動場の周波数が0つの準位間のエネルギー差\(\omega_0\)と一致する場合、それは1準位系と共鳴していると言われ、駆動場の振幅によって決まる周波数で量子状態がXNUMXとXNUMXの間で振動します。
このフィールドは次のように記述できます。
\(\widehat{H}_{drive}=\frac{\hbar \Omega}{2}\cos{(\omega_0 t + \phi)}\widehat{\sigma}_x\) (4)1
いくつかの重要な特徴を解説しましょう。量 \(\frac{\hbar \Omega}{2}\) は駆動信号のパワーを表しますが、式 2 のハミルトニアンと同様に、通常は周波数で表します。これは最終的にラビ周波数、つまり駆動場がシステムを 0 と 1 の間で反転させる速度を与えます。この値は駆動場自体の周波数とは異なり(多くの場合、桁違いに小さい)、駆動場自体の周波数とは異なることに注意してください。演算子 \(\widehat{\sigma}_x\) は別のパウリ行列であり、システムが実験室フレームの x 軸を中心に駆動されていることを示します。値 \(\omega_0\) と \(\phi\) は、それぞれ駆動場の周波数と位相です。駆動は XNUMX 準位システムとは共鳴しない場合もありますが、ここでは共鳴している場合について検討します。
ブロッホ球の場合と同様に、システムのダイナミクスを単純化するために、周波数 \(\omega_0\) の回転フレームに移行します。この回転フレームは量子ビットの自然な歳差運動と共動し、余弦項の高速時間依存性を排除します。このフレームでは、パウリ行列は次のように変換されます。
\(\sigma_x \rightarrow \cos{(\omega_0 t)} \sigma_x + \sin{(\omega_0 t)} \sigma_y\)
ここでは詳細な計算は省略しますが、その効果は次のとおりです。ハミルトニアンを回転座標系に変換すると、時間とともにゆっくりと変化する項(\((\omega \approx 0)\))と、非常に高速に振動する項(\((\omega \approx 2\omega_0)\))が生成されます。量子光学と制御における標準的な簡略化である回転波近似(RWA)を適用することで、これらの高速振動項の影響は対象となる時間スケールで平均してゼロになるため、これらの項は除去されます。回転座標系における有効ハミルトニアンは次のようになります。
\(\widehat{H}_{drive,RWA}=\frac{\hbar \Omega}{2} \left( \cos{( \phi)}\widehat{\sigma}_x + \sin{( \phi)}\widehat{\sigma}_y \right)\) (5)
これは回転系における低速回転を表します。回転軸はx-y平面にあり、駆動装置の位相ϕによって制御されます。ϕ = 0の場合、回転は純粋にx軸を中心に行われます。ϕ = π/2の場合、回転はy軸を中心に行われます。以下同様です。
ラビ振動
前のセクションで述べたように、駆動場を印加すると、系は量子状態間を振動します。巧みなユーザーは、駆動場の持続時間と位相のパラメータを操作することで、状態ベクトルを任意の点に回転させることができます。この挙動の最も基本的な検証の一つがラビ振動実験であり、この実験は系が真の3準位量子系のように振舞うことを示しています。この実験は典型的には、図XNUMXに示すXNUMXつのステップを経ます。
ステップ1: 量子ビットを初期化します。これは、量子ビットを積極的にゼロにリセットするか、T1が十分に短い場合はT1サイクルを数回待つことで実行できます。
ステップ2: ラビパルスを印加します。駆動場は、時間Tの間、x軸またはy軸に沿って印加されます。このパルスにより、状態ベクトルはブロッホ球上で回転します。
ステップ3: 量子ビットを読み出します。ラビパルスの後、システムは直ちに測定されます。
この実験はパルス幅を増やしながら繰り返され、状態は∣0⟩と∣1⟩の間の重ね合わせの範囲を掃引し、最終的に∣0⟩に戻ります。ただし、量子測定は0か1しか返さず、「中間」の値を返すことはできないことに注意してください。状態の意味のある像を構築するために、各パルス幅は複数回(通常は数千回)繰り返され、∣1⟩が測定される確率が抽出されます。
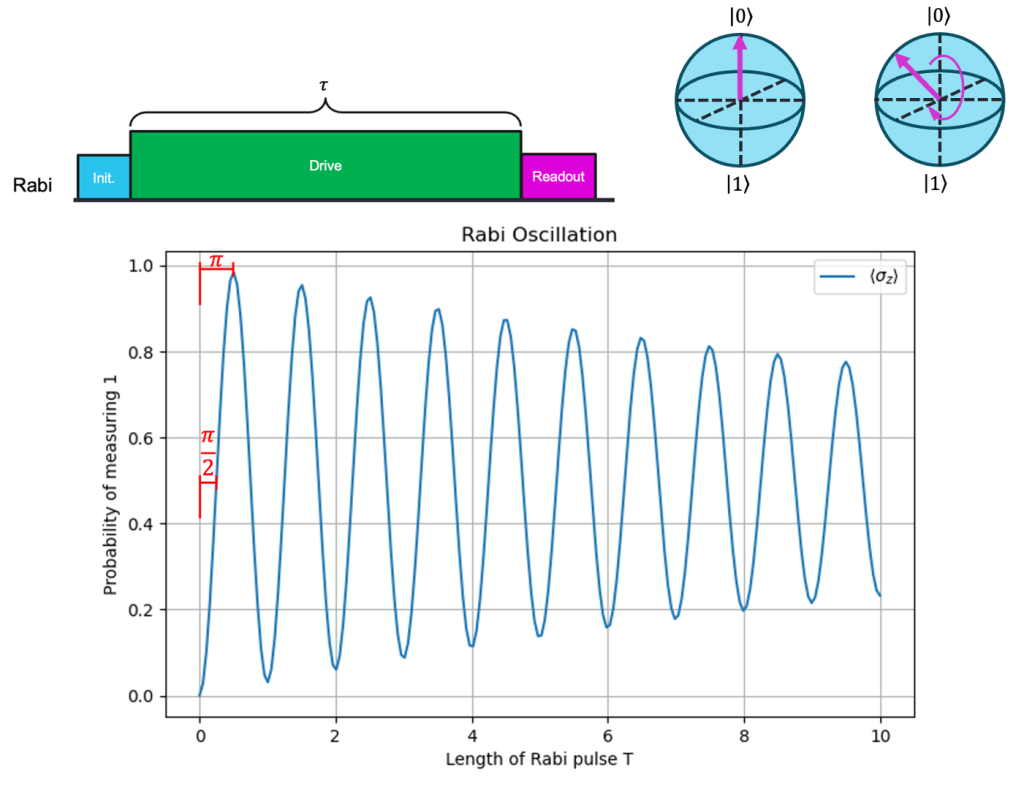
システムを長時間駆動すると、スピンのデコヒーレンスが起こります。ブロッホ球の用語で言えば、ベクトルは原点に向かって縮小し始めます。これは図3に示されています。システムは徐々に∣1⟩または∣0⟩に完全には戻らなくなり、最終的には有用な量子情報を持たない無秩序状態に落ち着きます。
ラビ測定において関心の高い典型的な値は、系を0から1(πパルス)へ、そして0から等しい重ね合わせ状態(π/2パルス)へ反転させる駆動パルスの長さです。これらの値が決定された後、より複雑なパルスシーケンスを制御できるようになります。これについては次のセクションで詳しく説明します。
ラムゼーとCPMG配列
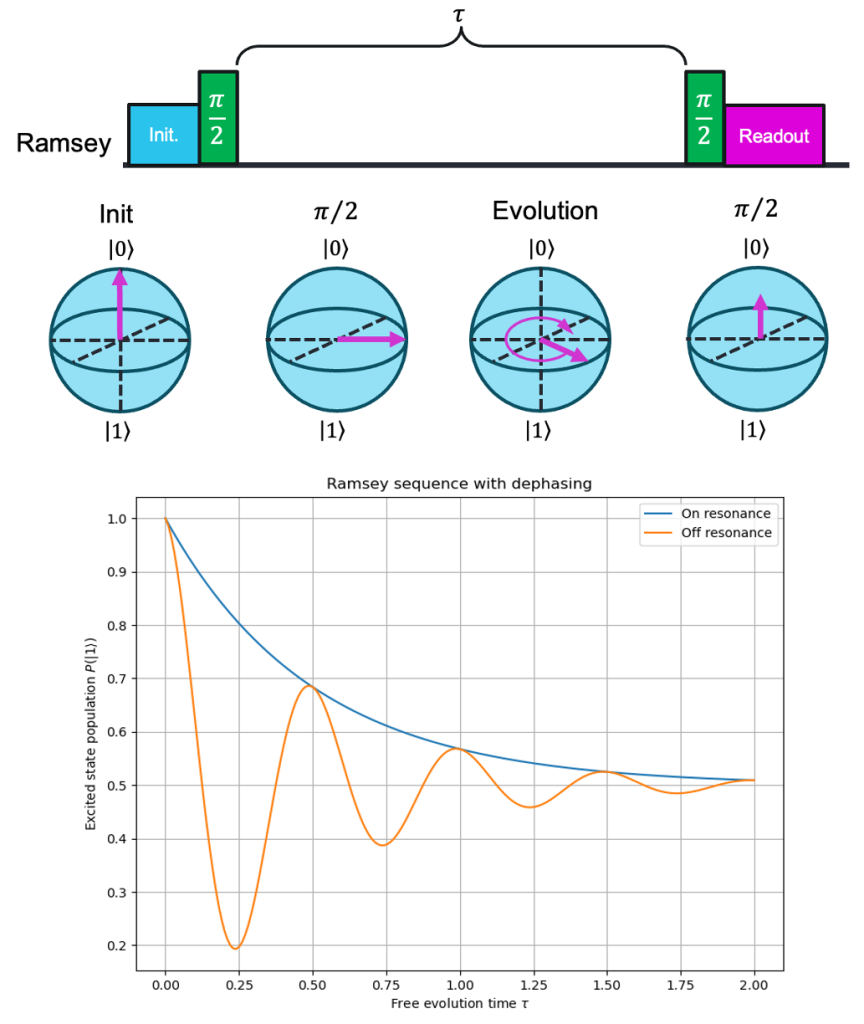
π パルスと π/2 パルスの長さがわかったので、コヒーレンス時間の定量化に進むことができます。最初のテストは、重ね合わせ状態にある量子ビットが位相情報をどれだけ長く保持できるかを測定することです。これはラムゼー干渉法と呼ばれるプロセスです。ラビシーケンスと同様に、常に基底状態 ∣0⟩ に初期化された量子ビットから開始します。π/2 パルスは状態を +z から xy 平面に回転させ、50/50 の重ね合わせを作成します。これが発生した直後、状態が時間 τ の間自由に進化できるようにします。ブロッホ方程式によると、状態ベクトルはデコヒーレンス (\(T_2\)) によりゼロに向かって縮小し始めます。ただし、はるかに速いタイムスケールで発生する別のプロセスがあります。磁場の変動や微小なデチューニング(すなわち、共鳴からの駆動周波数のオフセット)といった環境からの影響により、脆弱な量子状態が乱れ、状態ベクトルはZ軸を中心に回転し始めます。この現象は位相ずれと呼ばれます。量子ビットを意図的に歳差運動させたわけではありませんが、こうしたランダムな変動によって位相はいずれにせよ蓄積されていきます。
この蓄積された位相を検出するために、量子ビットの状態を測定軸上に投影し直します。これは、2番目のπ/1パルスを適用することで行われ、x-y平面の位相シフトがz軸方向の測定可能な個体数差に変換されます。位相ずれがなければ、量子ビットは∣4⟩状態になります。図1に示すように、Ramseyシーケンスを様々な自由進化時間τで繰り返し、量子ビットが状態∣4⟩にある確率を測定すると、駆動信号の離調と真の量子ビット共鳴によって決まる振動信号が観測されます[2]。これらの振動は指数関数的なエンベロープで制限され、時間の経過とともにコヒーレンスが失われる様子を反映し、位相ずれ時間である\(T_XNUMX^*\)によって特徴付けられます。
これらの測定は、τ の値ごとに何千回も繰り返されることが多く、結果として得られるデータ ポイントは 0 に減衰するコサイン信号を形成します。このエンベロープをフィッティングすると、固有のデコヒーレンスと低周波ノイズ (磁場や量子ビット周波数のゆっくりとしたドリフトなど) の両方を含む \(T_2^*\) の直接的な測定値が得られます。
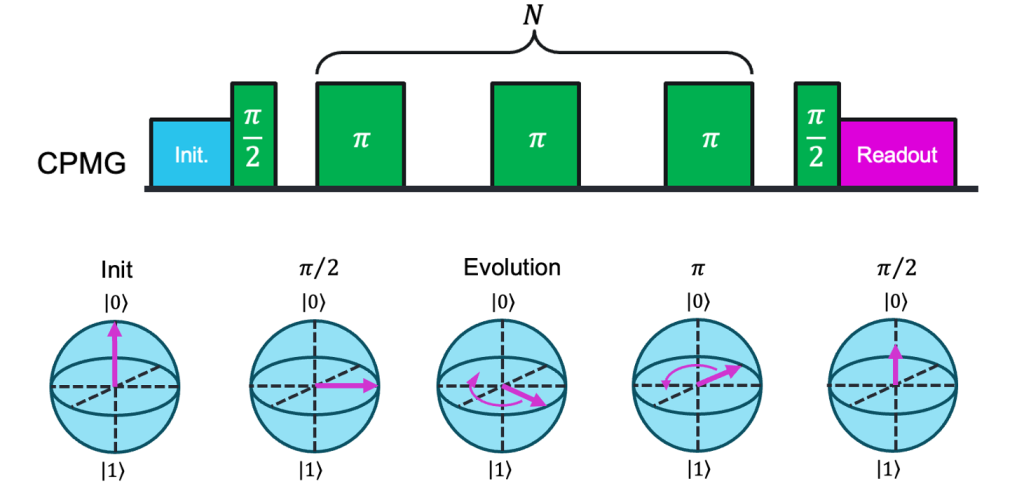
ラムゼーシーケンスは量子ビットの位相ずれ時間を測定する強力な方法を提供しますが、この値には固有のデコヒーレンスと、低周波磁場ドリフトのようなゆっくりとした可逆的なノイズ源の両方が含まれており、「真の」Tではありません。2ブロッホ方程式で表される。量子ビットの固有コヒーレンス時間を分離するために、スピンエコーまたはカー・パーセル・マイブーム・ギル(CPMG)シーケンスを適用することができる。これらの手法はラムゼーシーケンスに類似しているが、自由発展期間中に正確な間隔で追加のπパルスを挿入する。各πパルスは状態ベクトルをx軸またはy軸を中心に反転させ、位相蓄積の方向を反転させ、ゆっくりとした変動による誤差を効果的に打ち消す。これらのパルスは数十回、あるいは数百回繰り返すことができ、πパルス列の長さと間隔によって、効果的に抑制される環境ノイズ周波数の範囲が決まる。その結果、コヒーレンスの減衰が緩やかになり、固有Tを測定できるようになる。2 システムの持続的な量子制御を必要とするアプリケーションにとって、より有意義なベンチマークとなります。CPMGシーケンスの例については、図5を参照してください。
計算とセンシングの実験を実行する
これまで説明したラビ法、ラムゼー法、CPMG法といった一連の測定は、あらゆる量子プラットフォームにおける量子ビットの品質を評価するための標準化されたツールボックスの一部です。特にラビ法とラムゼー法の測定は、量子ビットの正確な共鳴周波数を特定するために、異なる離調間隔で繰り返し行われることがよくあります。この周波数が特定されたら、次に優先されるのは量子ビットの状態保持能力です。長いコヒーレンス時間(T1 とT2) は、より長く複雑な操作を可能にするため重要です。
量子コンピューティングでは、量子ビットの操作は、厳密にタイミングを合わせたパルス(通常はπとπ/2)を用いて行われ、状態ベクトルを制御された方法で回転させます。これらの回転は通常、量子ゲートと呼ばれる標準的な操作に分類されます。例えば、アダマールゲートは状態ベクトルを+z方向(|0⟩)から+x方向へ回転させますが、これはy軸を中心としたπ/2パルスと、それに続くx軸を中心としたπパルスを用いることで実装できます。より高度なゲート、特にXNUMX量子ビットを扱うゲートについては本稿では扱いませんが、原理は同じです。 量子アルゴリズムは、ブロッホ球の周囲に量子ビットを誘導するパルスのシーケンスを適用することによって実行されます。
量子センシングにおいては、量子システムの弱点、すなわち環境ノイズへの敏感さが強みへと転化されます。ここでは、パルスシーケンスは通常より単純化され、量子ビットが環境と相互作用できるように意図的に設計されます。磁場や電気勾配による予想される挙動からの逸脱は、信号として解釈されます。
例えば、既知の直流磁場下にある量子ビットが追加の未知の磁場にさらされると、その状態間のエネルギー分割が変化します。その結果、かつて共鳴していた駆動信号がわずかに共鳴から外れ、量子ビットは自由発展中に異なる位相を蓄積する可能性があります。補助磁場を印加する前後にラムゼー測定を行うことで、この位相シフト、ひいては未知の磁場の強度を推定することができます。このプロセスを、長いコヒーレンス時間を持つ高品質量子ビットを用いて何度も繰り返すことで、量子センサーは従来の技術をはるかに超える測定精度を実現できます。
ハードウェアでのパルスシーケンスの実装
本論文で解説するすべてのパルスシーケンスは、ラビ振動、ラムゼー干渉法、CPMGコヒーレンス測定のいずれの用途であっても、最終的には量子ビットの精密かつプログラム可能な制御を必要とします。パルスの正確なパラメータは量子ビットの選択に大きく依存しますが、基本的な物理特性は同じです。このセクションでは、Mokuを用いたパルスシーケンスのいくつかの異なる実装について説明します。
超伝導量子ビットは通常、IQ変調されたマイクロ波パルスによって制御されます。任意波形発生器(AWG)は、ベースバンドと呼ばれる低周波またはDCパルスのエンベロープを生成します。これらのベースバンドは、IQミキサー(デジタルまたはアナログ)を用いて高周波局部発振器と結合され、調整可能な振幅、周波数、位相を持つマイクロ波パルスを生成します。「I」チャンネルと「Q」チャンネルの相対的な振幅とタイミングによって、最終的なパルスの回転軸とブロッホ球面上の位相が制御されます。最適な制御とスペクトル漏れの最小化を図るため、パルス形状(多くの場合ガウス形状)が選択されます。
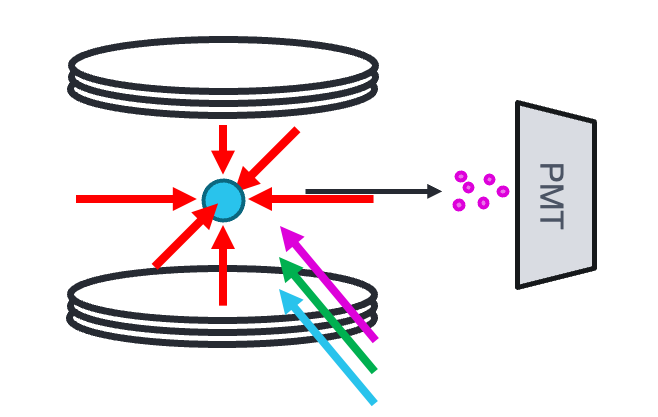
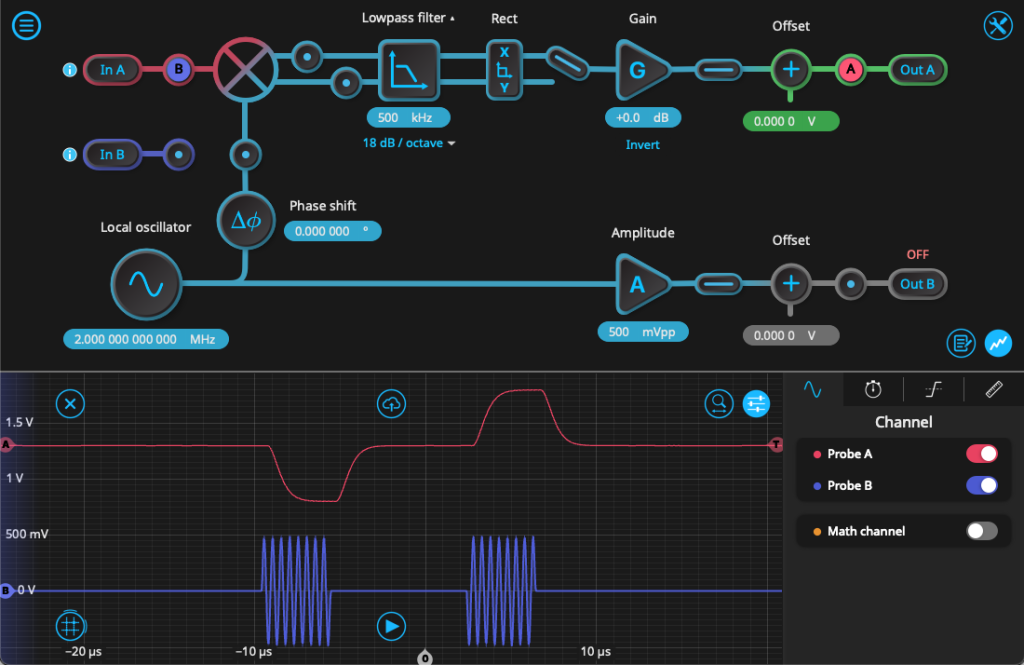
トラップイオンや中性原子などの光量子ビットプラットフォームでは、パルス制御は一般的に音響光学変調器(AOM)を用いて行われます。ここでは、AWGによって生成されたRF信号がAOMを駆動し、レーザービームの振幅、周波数、または位相を変調します。この構成により、タイミングと回転角度を精密に制御しながら高速光ゲーティングが可能になり、πパルスやπ/2パルスなどの量子ビット操作が可能になります(図6参照)。
モク 任意波形発生器再構成可能なMokuプラットフォームで利用可能な数多くの計測機器の一つである任意波形発生器は、超安定クロック精度と非常に柔軟な波形合成により、これらの信号を生成することができます。正弦波、ガウス包絡線、そして.csvファイルでアップロードするか、方程式で定義した完全カスタム波形をサポートしています。超伝導量子ビットセットアップでは、同期された2つのチャネルをI/Q制御に使用でき、原子システムでは、ベースバンドまたは変調RF出力を使用してAOMを駆動できます。任意波形発生器には、TTL入力や手動トリガーオプションなど、他の機器とのシーケンス同期のための多様なトリガーオプションも搭載されています。
Mokuは、パルス生成を支援するソフトウェア定義の計測器も多数提供しています。ユーザーはMokuを使用してパルスをデバッグできます。 オシロスコープ の三脚と スペクトラムアナライザ、配備 マルチインストゥルメントモード 時間領域と周波数領域の両方でリアルタイムに観測できます。オシロスコープは複数の入力チャンネルにわたるパルスの整形とタイミングの確認に役立ち、スペクトラムアナライザは周波数空間における歪みや高調波の付加がないことを確認するのに役立ちます。
このホワイトペーパーでは触れられていませんが、パルスは捕捉後に復調され、量子ビットの状態が決定されることがよくあります。これは通常、反射マイクロ波パルスや変調された光電流など、コヒーレントな信号の位相にエンコードされています。Moku ロックインアンプ 局部発振器(LO)が任意波形発生器とシステムクロックを共有することで、マイクロラジアン単位の精度を実現し、完全な同期でデュアルフェーズ復調を実行できる機能が追加されました。ユーザーはI/Qクアドレートの両方を表示・出力し、内蔵オシロスコープから直接データトレースをキャプチャできるため、デジタイザは不要です。さらに、I/Q出力は Mokuクラウドコンパイル 後処理用のモジュール、例えば ボックスカー平均化 またはデシメーション。パルスシーケンス復調の例については、図7を参照してください。
ADCやDACを介してアナログ信号とデジタル信号を変換する場合、信号は高調波やスプリアスによって歪むことが多いため、量子実験では適切なフィルタリングが不可欠です。 デジタルフィルターボックス これらの信号のクリーンアップを支援し、ユーザーは異なるフィルタ形状、機能、カットオフ周波数をプログラムできます。マルチインストゥルメントモードで他の機器と併用することで、デジタルフィルタボックスはアナログフロントエンドからの入力信号を受信し、復調のためにロックインアンプに渡す前にプリフィルタ処理を行うことができます。
Mokuは堅牢な Python の三脚と Matlab 複雑な実験の調整、パルス生成とデータトレース収集の自動化、パラメータスイープ(Ramsey実験における値など)のためのAPI。Mokuを特定の環境に統合するためにSCPIコマンドや一般的なVISAライブラリは必要ありません。ユーザーはインポート、接続、設定を行うだけで済みます。
Moku は再構成可能なソフトウェア定義のアーキテクチャを備えており、実験の要求の変化に応じてパルスシーケンスのプロトタイプ作成、調整、展開を簡単に行うことができます。
結論
このホワイトペーパーでは、ブロッホ球を視覚的な基礎として用い、2レベル量子システムの基本的な物理特性を概観しました。ハミルトン形式論と時間発展を紹介し、エネルギー緩和や位相ずれといったメカニズムを通して現実世界のシステムがどのようにデコヒーレンスを経験するかを考察し、回転フレームと駆動場がどのようにコヒーレント制御を可能にするかを探りました。さらに、量子ビットの特性評価と操作に用いられるRabi、Ramsey、CPMGといった基本的なパルスシーケンスについても解説しました。最後に、これらのパルスシーケンスをMoku任意波形発生器を用いて物理的に実装する方法を示しました。これらのツールを組み合わせることで、量子コンピューティングと量子センシングの両方の基盤が構築されます。
参考文献と脚注
[3] なぜ低エネルギー状態が上になるのでしょうか?これはNMRコミュニティから受け継がれた慣習です。通常、磁場は+z軸に沿って走ると定義されるため、ベクトルが+z軸と一致すると低エネルギー状態が発生し、反一致すると高エネルギー状態が発生します。
[4] 量子ビットの共鳴周波数は、デバイスパラメータやキャリブレーションデータに基づいて推定されることが多い。ラムゼー干渉法は、振動周波数を離調の関数として観測することで、真の共鳴周波数を正確に決定する手法を提供する。