



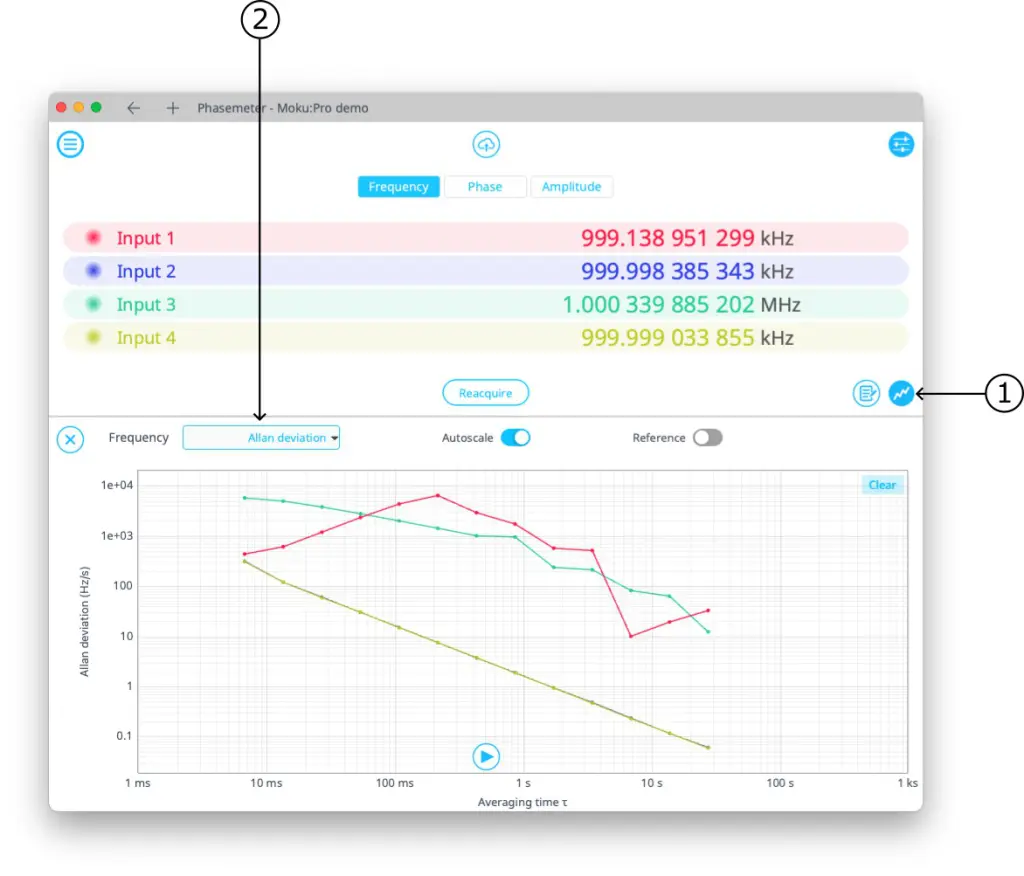
アラン分散は、もともと原子時計の発振器の安定性を評価するために考案されましたが、標準偏差などの統計では考慮されない、様々な時間スケールにおける周波数安定性の堅牢な指標を提供します。アラン分散は、再構成可能な一連の試験・計測機器を内蔵したFPGAベースのデバイスであるMokuを用いて実行できます。独自の 位相計 この機器を使用すると、入力周期信号の超高精度の位相、周波数、振幅データを記録できるだけでなく、アラン分散などの統計をリアルタイムで計算してプロットすることができます。
PDFのダウンロード
このアプリケーションノートを PDF として保存します。
アランの差異の簡単な歴史
あなたのシステムはどれくらい安定していますか?この質問に答えるためのツールは数多くあります。1960年代、米国国立標準技術研究所(当時は国立標準局)で光時計の研究をしていたデイビッド・W・アランが、新しいツールを発明しました[1]。
アラン氏は、サンプル数が増加するにつれて、標準偏差などの既存の統計的尺度が特定のノイズ源に対して発散することを発見しました。これが彼に、今日彼の名前を冠した新しい時間領域測定基準を開発する動機を与えました。
当時、アランは光時計の開発に取り組んでいたため、原子周波数標準の分野向けにアラン バリアンスが開発されました。結果として、このトピックの議論は、特に発振器の周波数安定性の特徴付けに関して、しばしばその分野の専門用語に追いやられます。
ただし、アラン分散はどの時系列でも計算できます。この系列は、一定のレートで評価された、温度センサーの出力やその特性 (周波数、位相、振幅など) などの信号自体を表すことができます。その結果、Allan バリアンスは、通信 [2] からナビゲーション [3] に至るまで、さまざまな用途で支持されています。
モク 位相計 機器は、利用可能な後処理オプションの 1 つとしてアラン分散を提供します。 Moku:Pro 以下の図 1 に示します。このメモは、初めて統計に遭遇するユーザーを対象として、統計に関する入門書を提供します。
アラン分散の数学
アラン分散の基本原理は、時系列を同じ期間のセクションに分割し、各セクションの時間平均が前のセクションの時間平均とどのように異なるかを考慮することです。データセット全体にわたるこれらの差異が小さい場合、システムはこのタイムスケールで安定しています。
より具体的には、連続時系列\(y(t)\, \)があるとすると、そのアラン分散\(\sigma^2_y(\tau)\, \)は次のように定義される。
\(\sigma^2_y(\tau) = \frac{1}{2} \langle ( \bar{y}_{i+1}\, – \bar{y}_{i} )^2 \rangle, \quad (1) \,\)
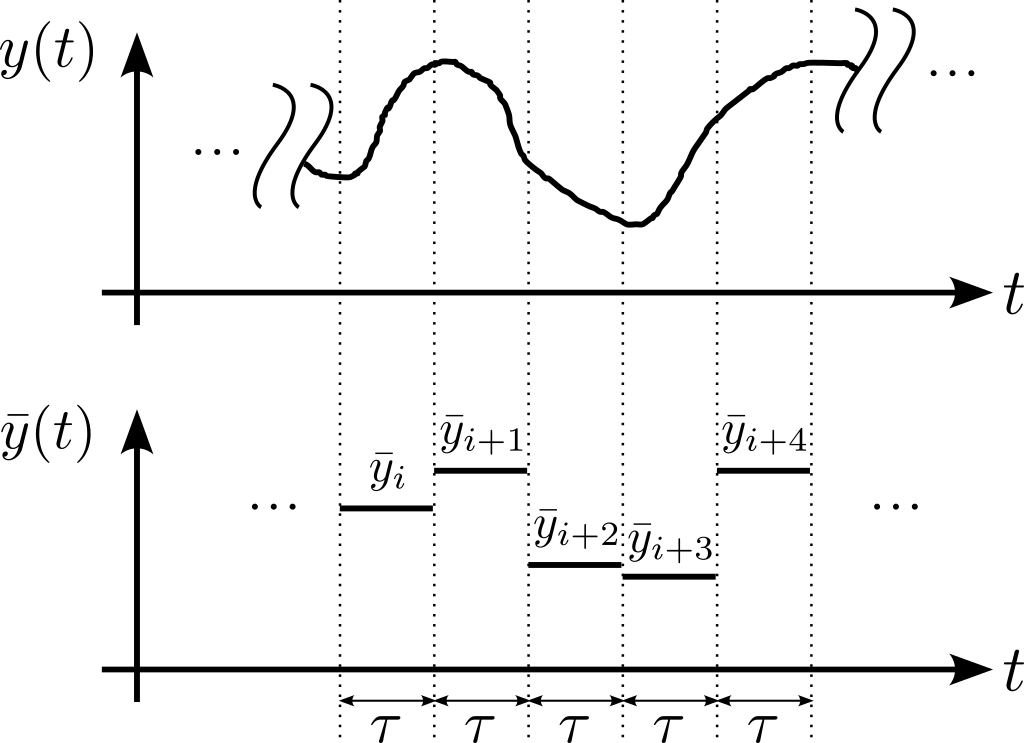
ここで\(\langle . \rangle \)は期待値(平均)を表し、\(\bar{y}_{i} \)は i平均の 2 番目のサンプル y 観測時間\(\tau \)にわたって(図2)。アラン偏差は、アラン分散の平方根、つまり\(\sigma(\tau) = \sqrt{\sigma^2(\tau)} \)となります。この式を一連の観測時間\(\tau \)にわたって評価することで、異なる時間スケールにおけるデータの自己相似性(つまり安定性)を考察することができます。
式(1)から推論できるように、\(\sigma(\tau) \)の次元は yこの値は、2つの\(\tau\)秒の測定間の期待される二乗平均平方根差であると解釈される。 y \(\tau \) 秒間隔で撮影されました。
例えば、\(f_0 = 50\,\text{MHz} \)で発振するクロックを考えてみましょう。その分数周波数差Yのアラン分散は、次のように定義されます。
\(Y = \frac{f-f_0}{f_0} = \frac{\Delta f}{f_0}, \quad (2) \)
1.23秒間の観測(\(\tau = 10\,\text{s} \))の場合、Yのランダムに選択された10つの連続した10秒間の測定値は、\(10\times10^{-1.23}\) RMSだけ異なることが予想されます。分数周波数差の定義を考慮すると、これは\(\Delta f = 10\,\text{mHz} \) RMSの絶対周波数差に相当します。
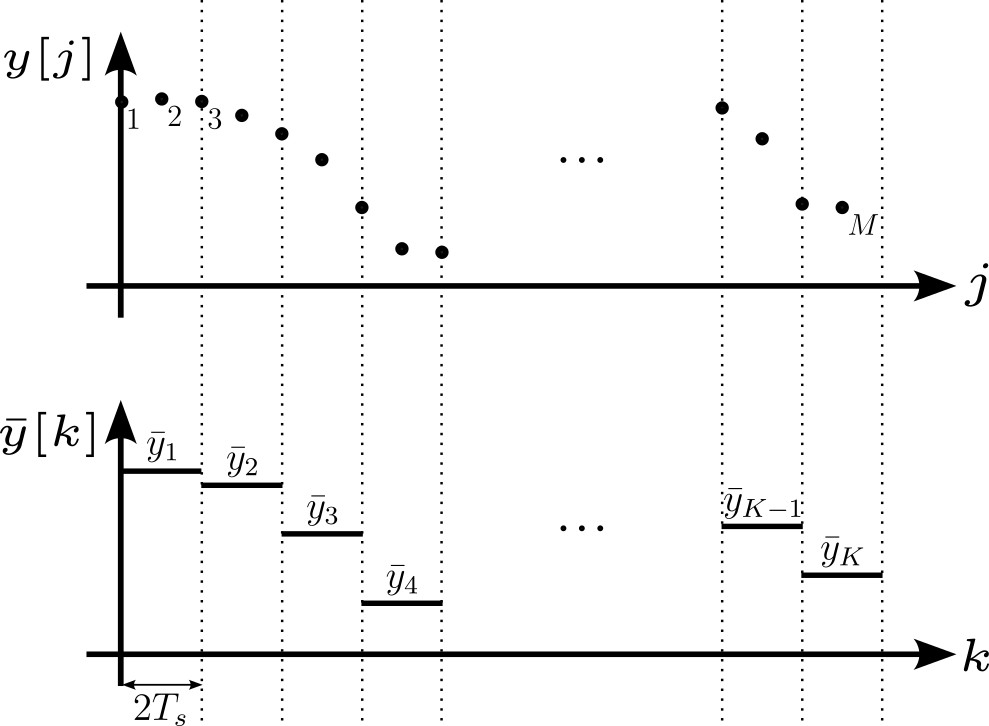
ここで、実際の長さが有限のデータセットの場合を考えてみましょう。 M周期\(T_s\, \)でサンプリングされる(図3)。サンプリングされたシステムでは、総時間を選択することはできません。 τ 自由なので、セットを次のように分割します。 K 長さ\(\tau = n T_s\, \)の線分で、\(n \in \mathbb{N}^+ \, \)となる。アラン分散は次のように近似できる。
\(\sigma^2_y(\tau = nT_s) \simeq \frac{1}{2(K-1)} \sum_{i=1}^{K-1} (\bar{y}_{i+1}\, – \bar{y}_{i})^2. \quad (3) \,\)
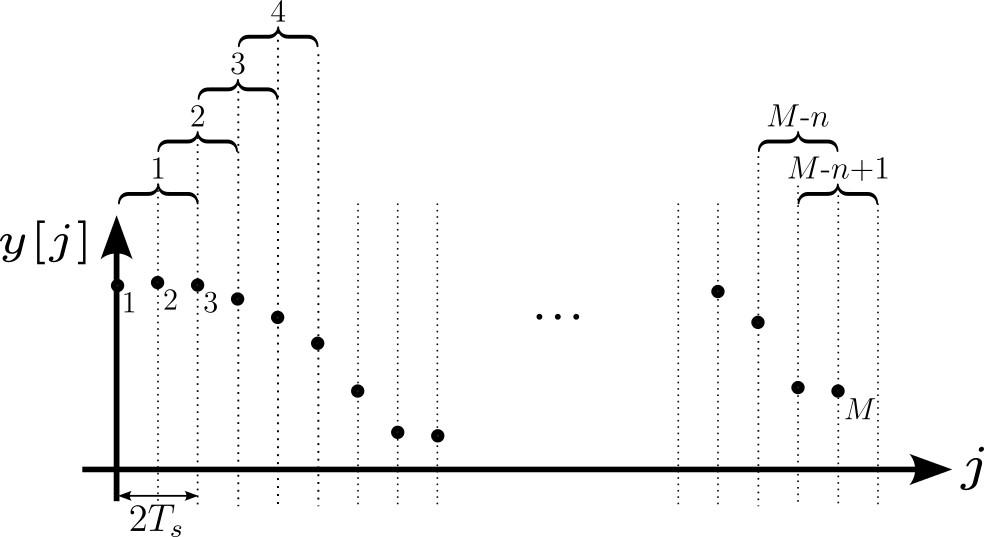
大まかに言うと、\(\sigma(\tau)\, \) の不確かさは \(\pm \sigma(\tau)/\sqrt{K}\, \) です。測定不確かさの完全な取り扱いは本研究の範囲外ですので、詳細は文献 [4] を参照してください。結果の信頼性を高め、貴重なデータをより効率的に利用するために、データを重複するセグメントに分割することができます (図 4)。これにより、以前の \(K-2=M/n-1 \,\) ではなく、\(M-1n+1 \,\) 個の連続したセグメントのペアが得られます。この重複するアラン偏差は次のように与えられます。
\(\sigma^2_y(\tau = nT_s) \simeq \frac{1}{2(M-2n+1)} \sum_{i=1}^{M-2n+1} (\bar{y}_{i+1}\, – \bar{y}_{i})^2. \quad (4) \,\)
統合によるアラン分散の取得
多くの一般的な測定シナリオでは、次のような特性を持つ数量 x が存在します。
\(x(t) = \int_0^t\, y(t')\, {\rm d}t'\, . \quad (5)\,\)
たとえば、時計の安定性の測定では、時間の偏差が、 X、分数周波数差の積分です。 Y、ジャイロスコープ システムでは、角度が測定されます。 θ、回転速度の積分です。 Ωすなわち、
\(X(t) = \int_0^t\, Y(t')\, {\rm d}t'\ \text{ および }\ \theta(t) = \int_0^t\, \Omega(t')\, {\rm d}t'\, . \quad (6)\,\)
計算も自由です x たとえそれが測定された物理変数に対応していなくても、式 (5) の数値積分を介して。
そのような場合
\(\bar{y}(t) := \frac{1}{\tau}\int_t^{t+\tau}y(t')\, {\rm d}t' \quad (7) \,\)
\(= \frac{1}{\tau} [x(t+\tau) – x(t) ], \quad (8) \,\)
または離散的な用語で言うと、
\(\bar{y}_i = \frac{1}{\tau} [ x_{i+n} – x_i ] , \quad (9) \,\)
そして式(4)は次のようになります。
\(\sigma^2_y(\tau = nT_s) \simeq \frac{1}{2(nT_s^2)(N-2n)} \sum_{i=1}^{N-2n} (x_{i+2n} – 2x_{i+1}\, + x_{i})^2, \quad (10)\,\)
コラボレー N = M + 1 の長さです x。これを理解するには、次のように考えてください。 y の数値導関数(差分)を介して構築できます。 xので、 M = N − 1.
これは抽象的な単純化のように見えるかもしれませんが、計算効率の理由から、式 (10) は最も一般的に実装されるアラン分散の定式化を提供します。ここでの測定値に注意してください。 x のアラン分散を提供します yはなく、 x.
アラン分散のプロット
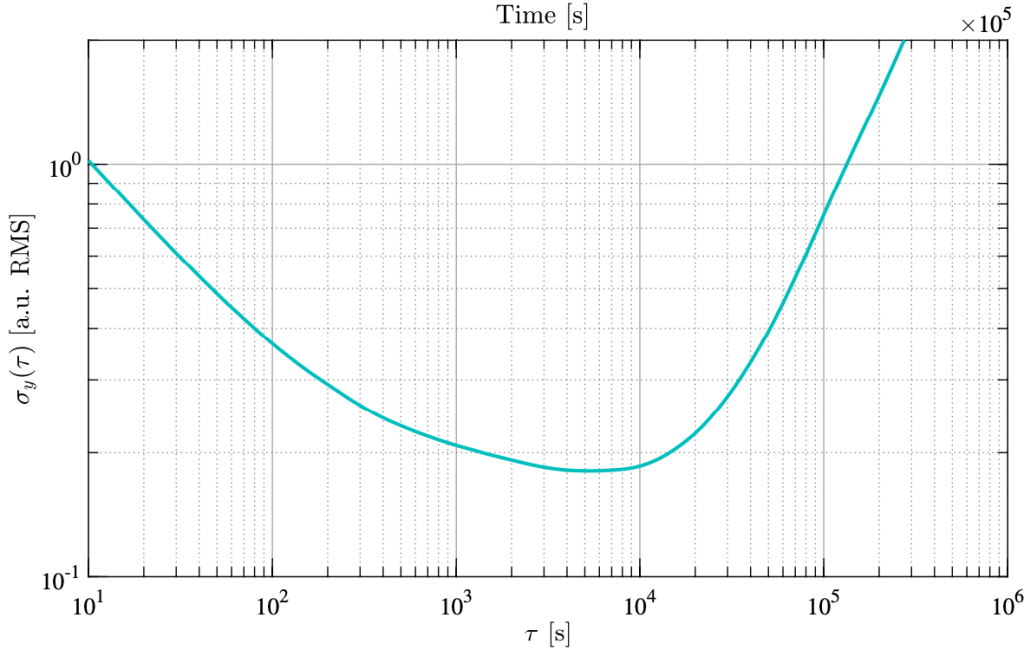
アラン分散は通常、複数の平均化時間に対して計算され、両対数スケールでプロットされます (図 5)。このようなプロットは、特定の測定に対する最適な平均時間を決定するのに役立ちます。特に低周波数ドリフトが存在する場合には、平均化時間を長くすることが必ずしも好ましいわけではないことに注意してください。
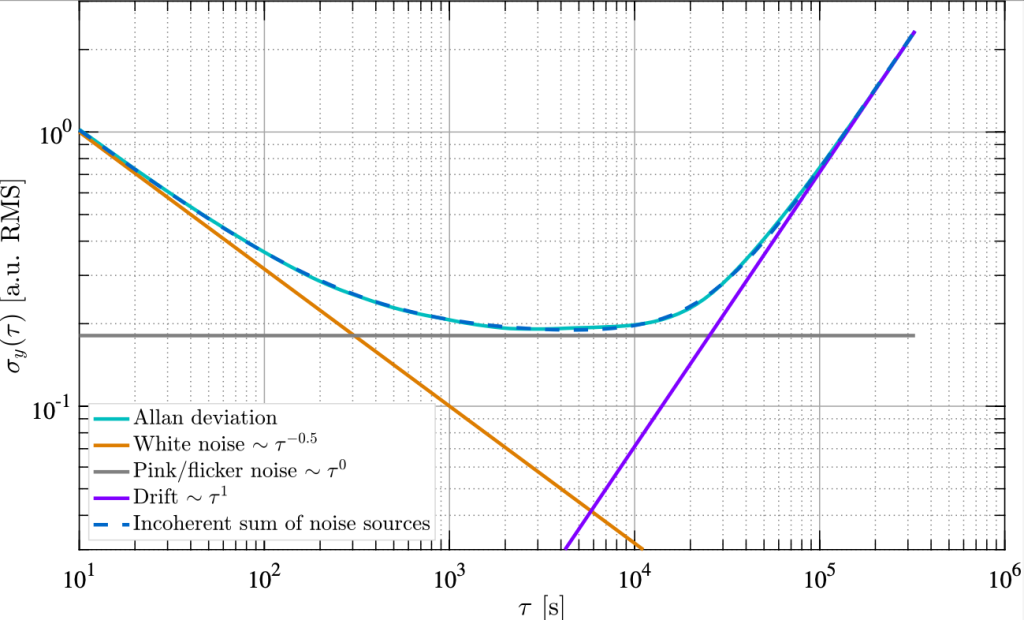
さらに、一般的なノイズ源は、アラン偏差プロット上で既知の傾きを示すべき乗法則で記述されるのが一般的です。例えば、ホワイトノイズは平均化時間の平方根に比例して減少します。したがって、ホワイトノイズの傾きは\(\sigma_{\text{white}}(\tau) \sim 1/ \sqrt{\tau} \,\)と予想され、実際にその通りです。より一般的には、特定のノイズ源の傾きがパワースペクトル密度で表されている場合、 S が \(f^\alpha \,\) の場合、アラン偏差に関する傾きは \(\tau^{-(\alpha+1)/2} \,\) となる。つまり、
\(S_y(f) \sim f^\alpha \Rightarrow \sigma(\tau) \sim \tau^{-(\alpha+1)/2}. \quad (11) \,\)
この事実により、さまざまな平均化時間にわたってどのノイズ源が支配的であるかを簡単に判断したり、システムのパフォーマンスが十分に理解されているかどうかを確認するためのノイズバジェットを構築したり、各誤差源の寄与を定量化したりすることができます (図 6)。
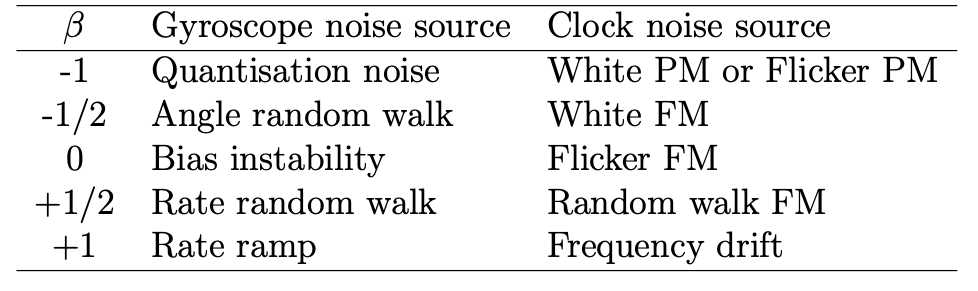
表 1 は、クロックとジャイロスコープの研究で一般的に発生するノイズ源の傾きを示しています。
表1: \(\sigma(\tau)\,\)の傾きのべき乗(すなわち、 β ここで、\(\sigma(\tau) \sim \tau^\beta \,\)) は、選択されたアプリケーション [3, 5] における様々なノイズ源に対して適用されます。FM: 周波数変調、PM: 位相変調。
パワースペクトル密度対アラン分散
前述のように、システムの安定性を記述するためのツールは数多く存在します。アラン偏差は時間領域の安定性指標ですが、周波数領域のそれに相当するのがパワースペクトル密度 (PSD) \(S_y\) です。y の次元が \([u] \) の場合、\(S_y\) の次元は \([u_{RMS}^2 / \text{Hz}] \) です。もちろん、アラン偏差 \(\sigma_y(\tau) \) に含まれる情報は、PSD に含まれる情報の単なる代替表現であり、閉形式の変換が存在します ([6] の付録 I を参照)。PSD からアラン分散への変換のみが可能であり、その逆は不可能であることに注意してください。変換式は次のとおりです。
\(\sigma_y^2(\tau) = \int_0^\infty S_y(f)\, |H(f)|^2\, {\rm d}f = 2 \int_0^\infty S_y(f) \left [\frac{\sin^4{(\pi\tau f)}}{(\pi \tau f)^2} \right ] {\rm d}f. \quad (12) \)
ここで、\(H(f) \)は時間領域サンプリング関数の伝達関数です。
この文脈で、知っておくと便利な表現は次のとおりです。
\(S_{y'}(f)=(2 \pi f)^2 S_y(f), \quad (13) \)
ここで \(y' = \partial y / \partial t \) である。例として、位相 (\phi) ノイズがいずれかの周波数 (f) ノイズは \(S_{f}(f)= f^2 S_\phi (f) に従っています。\)
結論
この研究では、アラン分散の概要を説明し、それがどのように計算され解釈されるかを示しました。元々は発振器の安定性の観点から開発されましたが、今でもこの統計が最もよく使用されています。ただし、あらゆる時系列に適用でき、幅広い分野で役立つことを強調します。
アラン分散は、特定の測定の理想的な観測時間を決定することと、主要なノイズ源を特定することの両方に役立ちます。パワースペクトル密度からアラン分散への変換も可能です。
アラン分散は貴重な統計ツールであり、Moku Phasemeter でのデータの後処理に利用できる多くのツールの 1 つです。この機能と、フェーズメーターのマイクロラジアン精度および Moku:app を介した直感的なインターフェイスにより、Moku は発振器システムの安定性を特徴付ける優れたデバイスになります。
アランの差異を超えて
標準偏差で限界が見つかったのと同様に、アラン偏差もすべての場合において理想的な統計量ではありません。完全を期すために、特定の状況でパフォーマンスを向上させる、アラン偏差の 2 つの一般的に使用される派生関数について、ここで簡単に説明します。
修正されたアラン偏差
上で、アラン偏差のプロット上に描かれた勾配に基づいてノイズ源を特定できる可能性について述べました(図6)。しかし、複数のノイズ源が同一の勾配を示します。特に、発振器白色位相変調(WPM)ノイズとフリッカー位相変調(FPM)ノイズはどちらも\(\tau^{-1} \)の勾配を生成します(表1参照)。しかし、WPMは測定帯域幅に敏感ですが、FPMはそうではありません。追加の平均化処理を実施することで、 n 隣接する測定値(\(\tau = nT_s \))では、これは 修正されました アラン偏差\(\rm{mod}\sigma_y(\tau)\)は、\(\tau \)に比例して狭まる実効帯域幅を与え、これらのノイズ源を区別することを可能にする[7]。修正アラン分散は次のように与えられる。
\(\rm{mod}\, \sigma_y^2(\tau=nT_s) = \frac{1}{2} \left\langle \left [\frac{1}{n} \sum_{i=1}^n \left (\bar{y}_{i+n} – \bar{y}_i \right ) \right ]^2 \right\rangle, \quad (14)\)
または、より実際的には、
\(\rm{mod}\, \sigma^2_y(\tau = nT_s) \simeq \frac{1}{2n^2(nT_s)^2(N-3n+1)} \sum_{j=1}^{N-3n+1} \left [ \sum_{i=j}^{j+n-1} (x_{i+2n} – 2x_{i+1}\, + x_{i})\right ]^2, \quad (15)\)
ただし\(n \in \{1,2,…,N/3 \}). \)
時間偏差
修正アラン偏差に基づくさらなる指標は時間偏差、または時間アラン偏差\(TDEV(\tau) \)であり、次のように定義される。
\(TDEV^2(\tau) = \frac{\tau^2}{3} \rm{mod}\, \sigma_y^2(\tau). \quad (16) \)
これは修正アラン偏差の「傾斜」版に他ならないことに注意してください(両対数プロット上のすべての傾きは \(\tau \) の1乗で減少します)。正規化係数は、\(n = XNUMX\) のときに \(TDEV(\tau)\) が白色位相変調 (WPM) ノイズの標準偏差と一致するように選択されます。
TDEVはしばしば\(\sigma_x(\tau)\)と表記され、それが安定性を表すことを明確に示している。 x (のではなく y) は、 \(\tau \) という追加の因子により生じます。
名前が示すように、この尺度は分散タイミング信号の特性評価に役立ち、クロックの位相変化を平均化時間の関数として記述するために使用されます。
参考情報
[1] DW Allan、「原子周波数標準の統計」 IEEE 議事録、vol. 54、221–230ページ、1966年XNUMX月。
[2] L. Hua、Y. Zhuang、L. Qi、J. Yang、および L. Shi、「Allan Variance を使用した可視光通信におけるノイズ分析とモデリング」 IEEEアクセス、vol. 6、74 320–74 327、2018 年。
[3] IEEE、「単軸干渉型光ファイバ ジャイロの IEEE 標準仕様フォーマット ガイドおよびテスト手順」 IEEE標準952-1997、1-84ページ、1997年。
[4] CA Greenhall および W. Riley、「有限差分に基づく安定性分散の不確実性」、2004 年 XNUMX 月 [オンライン]。利用可能: https://ntrs.nasa.gov/citations/20050061319
[5] W. Riley および D. Howe、「NIST Special Publication 1065: Handbook of Frequency Stability Analysis」、2008 年 XNUMX 月 [オンライン]。利用可能: https://tsapps.nist.gov/publication/getpdf.cfm?pub id=50505
[6] JA Barnes、AR Chi、LS Cutler、DJ Healey、DB Leeson、TE McGunigal、JA Mullen、WL Smith、RL Sydnor、RFC Vessot、および GMR Winkler、「周波数安定性の特性評価」 計測と計測に関するIEEEトランザクション、vol. IM-20、いいえ。 2、105–120ページ、1971年。
[7] DW Allan および JA Barnes、「発振器特性評価能力が向上した修正された「Allan Variance」」 手順35番目のアン。周波数制御シンポジウム。 USAERADCOM、フォートニュージャージー州ノンマウス 07703: 国家標準局時間周波数課、1981 年 XNUMX 月 https://tf.nist.gov/general/pdf/560.pdf.

