



マルチインストゥルメントモード Moku:Proでは、レーザーを光学キャビティにロックすることができます。 レーザーロックボックス また、ボード線図を測定するために、 周波数応答アナライザ 追加の試験機器や配線は不要です。エラー信号に外乱を注入し、周波数応答アナライザを用いて伝達関数を測定することで、閉ループゲイン、位相余裕、ループ外乱除去性能を確認できます。周波数応答アナライザとレーザーロックボックスを素早く切り替えられる柔軟性により、調整が容易になります。 PIDパラメータ ループパフォーマンスを最適化して安定性を確保し、外乱抑制を最大化します。
分子物理学や原子物理学分野などの高精度測定では、長期安定性が優れているため、アクティブ周波数ノイズ抑制機能を備えたレーザー システムが広く使用されています。安定したレーザーロックを実現するには、次のような測定で高度に最適化されたフィードバックコントローラーが必要です。1) 制御ループ伝達関数。ループの安定性を維持するためにユニティゲイン周波数を低く保ちながら、低周波数で十分なゲインを確認。 2) 外乱除去。外乱がレーザーに結合され、システム全体を通過した後に検出された場合に受ける周波数の関数としての応答。
伝達関数は通常、設定された周波数範囲にわたるループのゲインと位相シフトを表すボード線図としてプロットされます。閉ループ外乱除去を測定する際の主な課題は、フィードバック制御を中断せずにノイズを注入することです。通常、システムのセットアップは非常に複雑で、注入方法としてのノイズ源と、応答を測定するためのネットワークアナライザが必要です。
このアプリケーションノートでは、 マルチインストゥルメントモード on Moku:Pro レーザー安定化システムのオープンループとクローズドループの性能を特性評価します。Moku:Pro を使用すると、レーザーをキャビティにロックし、外乱を注入し、同時にオープンループ、クローズドループ、外乱の伝達関数を測定できます。PID パラメータを調整してループ構成を最適化し、安定性を確保し、外乱抑制を強化し、周波数ノイズを抑制できます。Moku:Pro は、レーザーの安定化と特性評価のためのコンパクトで効率的なソリューションを提供します。
フィードバック制御システムの基本構造
レーザーロックシステムをよりよく理解するためには、まず一般的な フィードバック制御このセクションで外乱除去方程式を解析して導出することで、外乱を注入する場所とループ応答をプローブする場所を決定することができます。 パウンド・ドレバー・ホール (PDH) ロック手順。
一般に、制御システムは、開ループ制御システムと閉ループ制御システムの2種類に分類できます。主な違いは、開ループ制御システムの制御アクションではシステムの出力に依存しないのに対し、閉ループ制御システムの制御アクションではシステムの出力に依存するということです [1]。一般的なフィードバック制御ループの基本的な考え方は、現在の動作点と基準値の差を誤差信号として使用して、一定の設定値で動作するシステムの出力を維持することです [1]。レーザー安定化のためのポンドドレバーホール(PDH)法では、キャビティ反射を利用してエラー信号を生成し、そのエラー信号がレーザーにフィードバックされて、最小限のレーザー周波数ノイズで特定の周波数で発振する光源を維持します。これは閉ループ制御と見なされます [2]。基本的なフィードバック制御システムは通常、図1に示すように、プラント (制御対象)、センサー (プラントの出力測定)、コントローラー (フィードバックの入力生成) の3つのコンポーネントで構成されます。
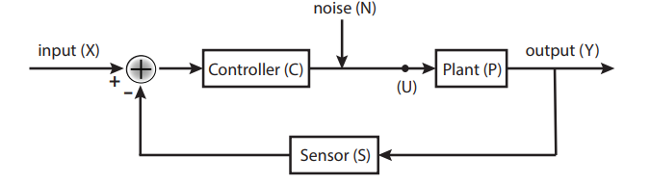
図1:典型的なフィードバック制御システムのブロック図。プラント (P)、特定の信号を測定するセンサー (S)、プラントへの入力を生成するアクチュエーター/コントローラー (C)の3つの主要なコンポーネントで構成される。
制御システムの伝達関数は、ラプラス変換を使用して導出できます。ラプラス変換は、与えられた時間領域信号 \(f(t)\) に対して \(F(s)\) として定義されます。
\(F(s) = \int{e^{-st} f(t) dt}\)
図1に示すシステムでは、3つのコンポーネントそれぞれに独自の伝達関数があり、\(P(s)\)と表記されます。, プラント、センサー、コントローラそれぞれについて、\(S(s)\)、\(C(s)\) が用いられます。以下の導出を簡略化するために、追加の内部信号が導入され、\(U(s)\) とラベル付けされています。入力信号 \(X(s)\) を用いて、このようなシステムを通過後の出力信号を次のように計算できます。
\(Y(s) = U(s)P(s)\)
\(U(s) = C(s) \left( X(s) – Y(s)S(s) \right)\)
上記の式によれば、フィードバックシステムの伝達関数\(H(s)\), 出力のラプラス変換と入力のラプラス変換の比によって次のように導出できます。
\(H(s) = \frac{Y(s)}{X(s)} = \frac{C(s)P(s)}{1+C(s)P(s)S(s)}\)
ここで、\(C(s)P(s)S(s)\) はシステムの開ループゲイン(リターンレシオとも呼ばれる)であり、\(H(s)\) は閉ループゲインと呼ばれます。これまでの解析では信号の変換に焦点を当ててきましたが、実際にはノイズの抑制がより重要になります。ノイズはループ内のどこからでも発生する可能性がありますが、ここではプラントから発生するノイズについて考察します(他のノイズ源も同様の手順で解析できます)。ノイズ \(N(s)\) を解析に取り入れると、システム出力は次のように変更されます。
\(Y(s) = \frac{C(s)P(s)}{1+C(s)P(s)S(s)}X(s) + \frac{1}{1+C(s)P(s)S(s)}N(s)\)
大きな制御ゲイン(\(C(s) \rightarrow \infty \))を持つシステムの場合、システムの出力は入力に近づき、これはユニティゲインとも呼ばれます。プラントへの外部外乱によって導入されたノイズもゼロに向かって大幅に抑制されています。このような外乱の伝達関数は外乱除去(または感度関数)とも呼ばれ、プラントの出力に現れる外乱に対する制御システムの感度を特徴付けます。開ループ伝達関数と同様に、外乱除去も周波数に依存します。外乱除去の振幅がユニティゲインを超えると、このようなノイズ抑制は無効になり、対応する周波数はユニティゲイン周波数と呼ばれます。さらに重要なのは、開ループゲインの位相が180度(閉ループ極が\(1 + C(s)P(s)S(s) = 0\)となる場合)に達すると、ノイズが増幅され、特に\(C(s)P(s)S(s)\)が-1に近づくとシステムが不安定になることです。この転換点は、フィードバックシステムにとって位相余裕と呼ばれる重要なパラメータです。制御ループの帯域幅はユニティゲイン周波数と位相余裕の両方によって制限され、位相余裕がユニティゲイン周波数よりも低い周波数で発生するとシステムは安定しません。
レーザーによるフィードバック制御
以下のレーザー安定化システムは、前のセクションで説明したフィードバック制御ループに相当します。このアプリケーションノートでは、レーザーはポンドドレバーホール(PDH)法を使用したフィードバック制御ループの光共振器で安定化されています。PDH法の詳細については こちら図 2 は、内部PZTアクチュエータと組み合わせた外部サーボによって形成される、レーザー安定化プロセスのフィードバックループを示しています。

図2: レーザー波長を空洞共振の範囲内に合わせることを概念的に表したフィードバック制御ループのブロック図。PIDコントローラーは、レーザー内のPZTトランスデューサーであるアクチュエータを制御する。
安定化システムは、レーザーをプラント、その周波数をシステムの出力 \(Y(s)\) と解釈できます。システムが安定化を試みる設定点は、基準共振器の共振周波数です。出力は光周波数弁別器で設定点と比較されます。センサーは、光学系と光電子工学系を含むこれらの信号 (\(S(s)\)) の差を測定し、その結果として誤差信号が生成されます。この誤差信号はコントローラによってさらに処理されます。通常、コントローラはサーボ (\(C(s)\)) とも呼ばれます。コントローラはプラントの特性に対応し、位置誤差を低減し、駆動時のオーバーシュートを最適化するための制御信号を提供します。ここで使用されるレーザー (プラント) は通常、チューナブルレーザーであり、その周波数は制御信号に応じて内部の PZT トランスデューサーを介して変調できます。したがって、レーザーに供給される制御信号によって最終的な出力波長が生成されます。最後に、この出力はフィードバックされ、フィードバック信号を更新します。
安定したフィードバックと十分なノイズ抑制を確保するには、アクチュエータの応答、コントローラの応答、PID設定を慎重に実装する必要があります。それをよりよく理解するためには、外乱除去率を測定することで、システム全体としての閉ループ応答を特徴づけることができます。これは、 Vinポイントにスイープ信号を注入し、 Voutで出力を抽出することで実現できます。対応する周波数応答は以下のように計算されます。
\(\frac{V_{out}(s)}{V_{in}(s)} = \frac{1}{1+C(s)P(s)S(s)}\)
\(-\frac{\text{誤差信号}}{V_{in}(s)} = \frac{C(s)P(s)S(s)}{1+C(s)P(s)S(s)}\)
\(-\frac{\text{誤差信号}}{V_{out}(s)} = C(s)P(s)S(s)\)
ここで、\(C(s)\)、\(P(s)\)、\(S(s)\)は、制御器(サーボ)、プラント(PZTアクチュエータ)、およびセンサーの動作を表します。上式の式は外乱除去を表し、次の式は相補感度関数を表し、最後の式は制御システムの開ループゲインを表します。
実験装置
この実験では、Moku:Proはレーザーロックボックスとして機能するだけでなく、システムの閉ループ応答特性も評価します。図3はシステム全体の構成を示し、図4はマルチインストゥルメントモードの構成を示しています。目的を達成するために、XNUMXつのインストゥルメントをXNUMXつの独立したスロットに配置しました。 レーザーロックボックス, ロックインアンプ, PIDコントローラー, 周波数応答アナライザ.
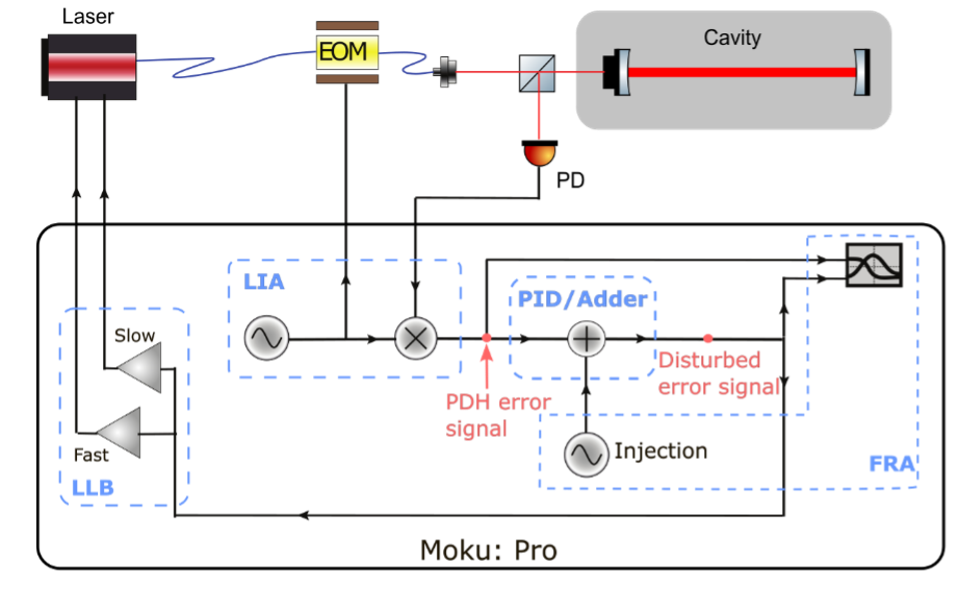
図3: レーザー安定化システムのループ内外乱除去を特徴付ける実験装置。 外乱除去は、周波数応答アナライザを使用して直接測定・生成され、レーザーはMoku:Proのレーザーロックボックスを使用して外部基準キャビティにロックされる。. 注入または加算は、0 dB 比例ゲイン設定の PID コントローラ機器を使用することで実現されます。

図4: Moku:Pro のマルチインストゥルメントモードでの構成。4つのスロットは互いに完全に独立しているため、スロットに追加されるインストゥルメントの順序は重要ではありません。
外乱は、エラー信号の復調後、コントローラに伝播する前に注入されます。そのため、レーザーのロック手順を2つの独立したプロセスに分離しました。1つはロックインアンプで、Out 1を介して電気光学変調器(EOM)への変調信号を生成し、エラー信号を復調します。もう1つはレーザーロックボックスで、復調プロセスを省略し、サーボ信号または制御信号のみをレーザーに返します。レーザーロックボックス内の高速PIDコントローラからの出力であるOut 2は、レーザーのピエゾに直接接続され、レーザー周波数を微調整します。Out 3はレーザーの温度制御に接続されています。
同時に、周波数応答アナライザで閉ループ外乱除去を測定しました。この測定では、掃引正弦波変位を生成し、PID コントローラを加算器として使用してインループ信号 (In 1) に注入しました。この加算点を実現するために、入力マトリックスを \([(1, 1), (0,1)]\) に設定し、比例ゲインを 0 dB に設定して、PID コントローラを加算器として構成しました。加算器の出力は 2 つのパスに分割され、1 つはレーザー ロック ボックスのエラー信号を提供し、もう 1 つは周波数応答アナライザのチャネル B に接続して閉ループ周波数応答を測定しました。チャネル A は、正弦波を注入する前のインループ周波数ノイズを記録しました。
レーザーロックボックスがサーボ動作を担いました。PDHエラー信号はランプスキャンで監視し、低速温度オフセットを調整してキャビティ共振をスキャン範囲の中央に近づけました。次に、システムを安定させる前に過補償を回避するため、積分器の飽和をオンにしました。次に、搬送波のゼロクロスポイントをロックポイントとして選択し、「ロックアシスト」機能を使用してロックを確立しました。この機能は高速PIDコントローラを起動します。最後に、積分器の飽和を無効にして、低周波数でのゲインを高めるために積分器をフルに活用しました。レーザーロックボックスの詳細な説明はこちらをご覧ください。 こちら.
レーザー周波数を共振器に同期させた後、測定機器を周波数応答アナライザに切り替えました。測定は(入力÷出力)に設定し、両チャンネルとも十分に小さい出力信号(5mVpp)を出力しました。周波数源を対象周波数範囲にわたって掃引することで、伝達関数を生成しました。
実験結果
図5の結果をご覧ください。
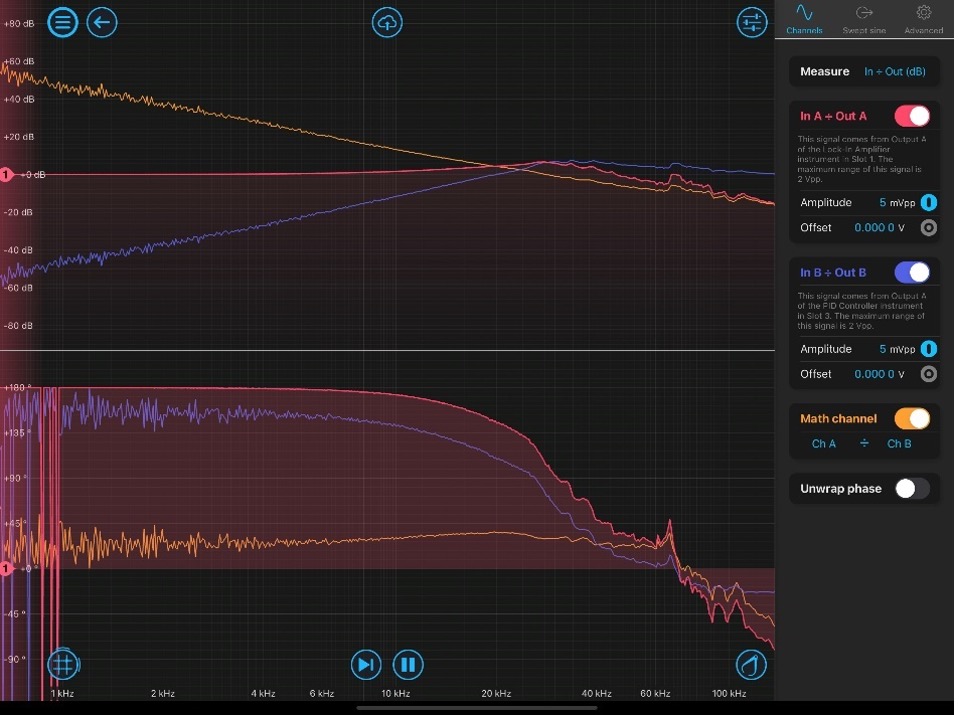
図5: 測定された伝達関数。全体的な閉ループ応答 (赤)、閉ループ外乱除去 (青)、レーザーロックシステムで算出された開ループゲイン (オレンジ) 。外乱除去のユニティゲイン周波数は約24 kHz。
赤いトレースは測定された相補伝達関数(式 7)を示し、青いトレースは外乱除去(式 6)を示しています。演算チャネル(ChA ÷ ChB)を使用することで、図 5 のオレンジ色のトレースで示される開ループ伝達関数を動的に計算できます。青いトレース(またはオレンジ色のトレース)から、ロックループのユニティゲイン周波数は最大約 24 kHz で、位相マージンが 90 度をわずかに超えることがわかります。このシステムのロック帯域幅の制限は、PZT の機械的共振に起因します。プロットから、約 63 kHz で機械的共振があることがわかります。したがって、システムをさらに高いゲインに押し上げると、共振振動が励起され、この特定の周波数ポイントで正のフィードバックが発生してシステムが不安定になる可能性があります。
さらに、オープンループ応答(オレンジ色のトレース)から、低周波ゲインが60dBに達していることがわかります。これは青色のトレースにおける-60dBの摂動抑制と一致しており、レーザーロックボックスが十分なサーボゲインを提供してレーザー周波数ノイズを十分に抑制し、安定したロックを維持できることを示しています。
製品概要
Moku:Proの柔軟なフィールドプログラマブルゲートアレイ(FPGA)ベースのアプローチは、従来の固定機能テスト・計測ハードウェアの多くの欠点を解消します。FPGAベースのアーキテクチャは、計測器を動的に切り替える機能を提供します。また、複数の計測器を同時に使用することも可能です。例えば、レーザーロックボックスで安定したロックを維持しながら、周波数応答アナライザでレーザーロックループの伝達関数を特性評価するといったことが可能です。マルチ計測器モードにより、ループ構成の最適化プロセスがはるかにシンプルかつ効率的になります。直感的なユーザーインターフェースは、実験セットアップの複雑さを大幅に軽減し、よりアクセスしやすく柔軟なソリューションを提供します。
さらに、このアプリケーションノートでは、PDH法を用いた例を示していますが、この制御ループ応答の検証方法は、DCロッキング、フリンジサイドロッキング、チルトロッキングなどの他のロッキング技術にも適用でき、レーザー周波数安定化分野における実用的なアプリケーションの幅が広がります。
謝辞
実験の詳細、Moku:Proの使用説明、フィードバックを提供してくださったAndrew Wade氏、Kirk McKenzie氏、およびオーストラリア国立大学に心よりお礼申し上げます。オーストラリア国立大学での実験では、ARC Centre of Excellence for Gravitational Wave Discoveryの支援を受けました。
参考情報
[1] Doyle, J. C., Francis, B. A., and Tannenbaum, A. R. (2013). Feedback control theory. Courier Corporation.
[2] Black, E.D., 2001. An introduction to Pound–Drever–Hall laser frequency stabilization. American journal of physics, 69(1), pp.79-87.
質問・コメント
リキッドインストゥルメンツへのお問い合わせ サポート.

