Mokuで位相を検出するテクニック
伝播する電磁波間の位相差を正確に測定する能力は、この量が貴重な情報を伝えることが多いため、多くの科学および工学アプリケーションにとって重要です。
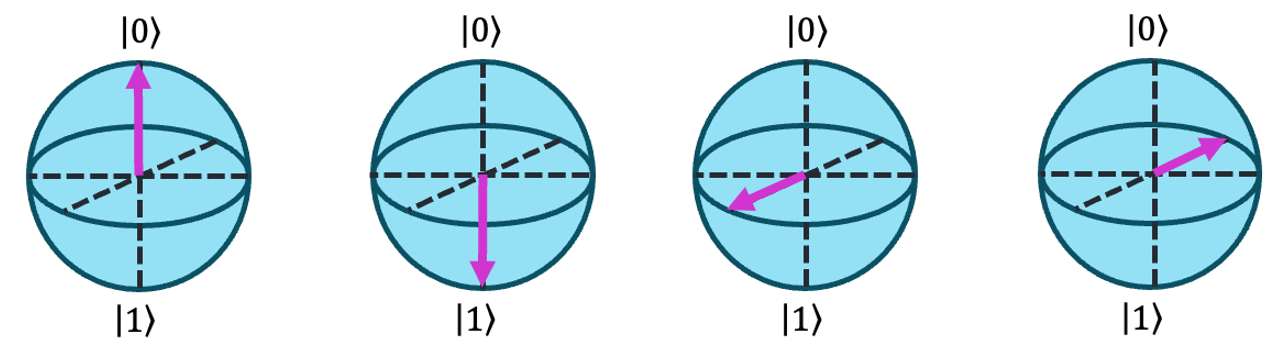
特に重要なのは 顕微鏡干渉計の 2 つの経路間の位相差から、テスト対象のサンプルの厚さを判断できます。量子情報技術では、量子ビットの状態に関する情報は、読み出しパルスの位相シフトを介してエンコードされることがよくあります。同様に、光ファイバーと自由空間の両方を介した光通信では、位相シフト キーイングなどの変調技術が使用され、搬送波の位相変化に情報をエンコードできます。
この構成ガイドでは、Liquid InstrumentsのFPGAベースのプラットフォームであるMokuを使用して位相検出を行う15つの手法について説明します。Mokuは、再構成可能なXNUMX種類のテストおよび測定機器を提供するプラットフォームです。これらの機器は、標準的な実験室機器から、 オシロスコープ の三脚と スペクトラムアナライザ より高度なツールとして、 タイム&周波数アナライザ, ロックインアンプ, 位相計次に、これらの各機器を使用して正確な位相検出を実行するための手順を順を追って説明します。
信号と基準間の相対位相を測定する方法はいくつかあり、それぞれ精度と複雑さが異なります。このセクションでは、それぞれ異なる Moku 機器を使用する 4 つの異なる位相測定方法の構成ガイドを提供します。また、各手法のメリットについて説明し、正確な位相検出を可能にする手順を順を追って説明します。
復調不要の方法
このセクションで紹介する 2 つの方法は、入力信号を直接デジタル化してキャプチャする方法です。信号を局部発振器や基準信号と混合する必要はありません。
Mokuオシロスコープによる直接測定
オシロスコープは、信号のデバッグや検証に多用途に使えるツールであるため、研究室環境では広く使用されています。直感的で素早い測定には優れていますが、精度が犠牲になることがよくあります。他のデジタルオシロスコープと同様に、Mokuの入力信号は オシロスコープ ADC を介してデジタル化されてから、機器のメモリに渡されます。Moku オシロスコープは、トリガーされると、時間範囲とサンプリング レートによって決まるポイント数を直接キャプチャします。データをリアルタイムで画面にプロットするには、まず取得モードに応じてデータを間引きまたは平均化し、次に補間機能によって接続して連続的に表示します。Moku オシロスコープを使用して、次の手順に従います。
1. テスト対象のデバイスをMokuアナログフロントエンドに接続するか、 マルチインストゥルメントモード 波形発生器 スロット 1 にオシロスコープを、スロット 2 にオシロスコープを接続します。この例では、図 1 に示すように、別の Moku デバイスを使用して、相対位相が 45° の 1 MHz 周波数の XNUMX つの同一の正弦波を生成します。
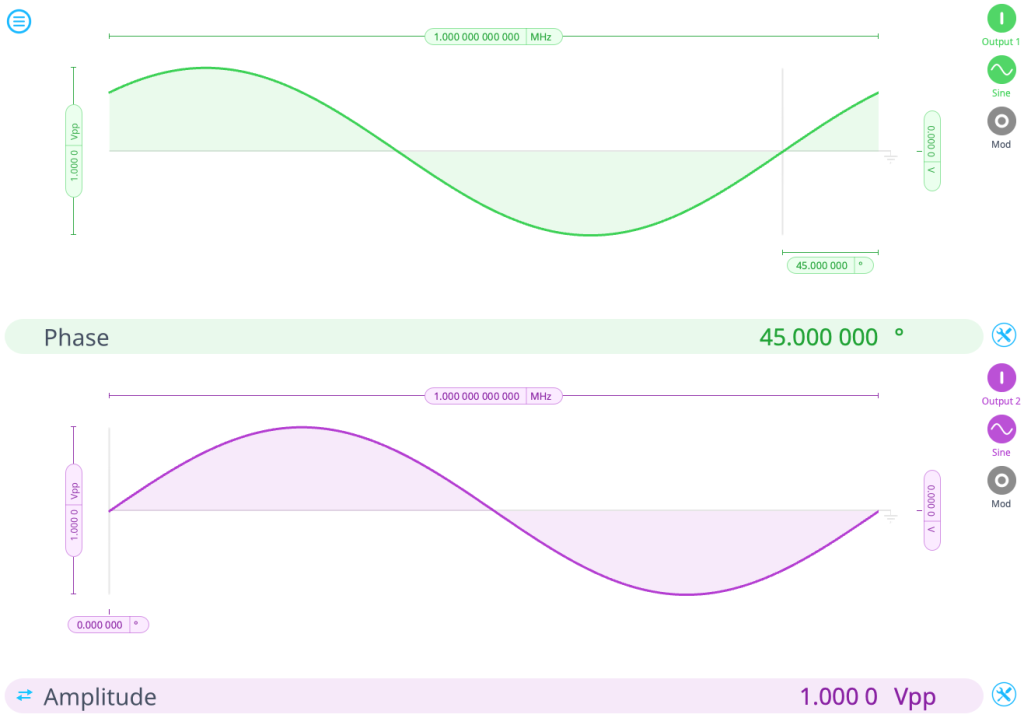
図1:振幅1Vpp、周波数1MHzの45つの信号(位相差XNUMX°)です。Moku波形ジェネレータを使用して生成されたこれらの信号は、この構成ガイドのすべてのデモで使用されます。
2. Mokuオシロスコープを、構成に応じてシングルインストゥルメントモードまたはマルチインストゥルメントモードで起動します。「チャンネル」タブで、チャンネルAとBを有効にします。
3. [タイムベース] タブをクリックし、測定の適切な時間範囲 (20 µs など) を設定します。取得設定は、今のところデフォルトのままにしておきます。デフォルト モードは [通常] で、ウィンドウ内で表示する XNUMX つのポイントを選択してダウンサンプリングします。これは、同じウィンドウ全体で平均化してダウンサンプリングする [精度] モードとは対照的です。これらの方法は、入力信号の性質に応じて異なる効果をもたらす可能性があります。
4. 次のタブ「トリガー」で、トリガーモード、チャンネル、レベルを設定します。チャンネルAの入力をトリガー信号として、自動的にトレースをキャプチャします。トリガーレベルが信号のピークツーピーク電圧の範囲内であれば、この例では正確な値は重要ではありません。図0に示すように、立ち上がりエッジで2Vに設定しています。
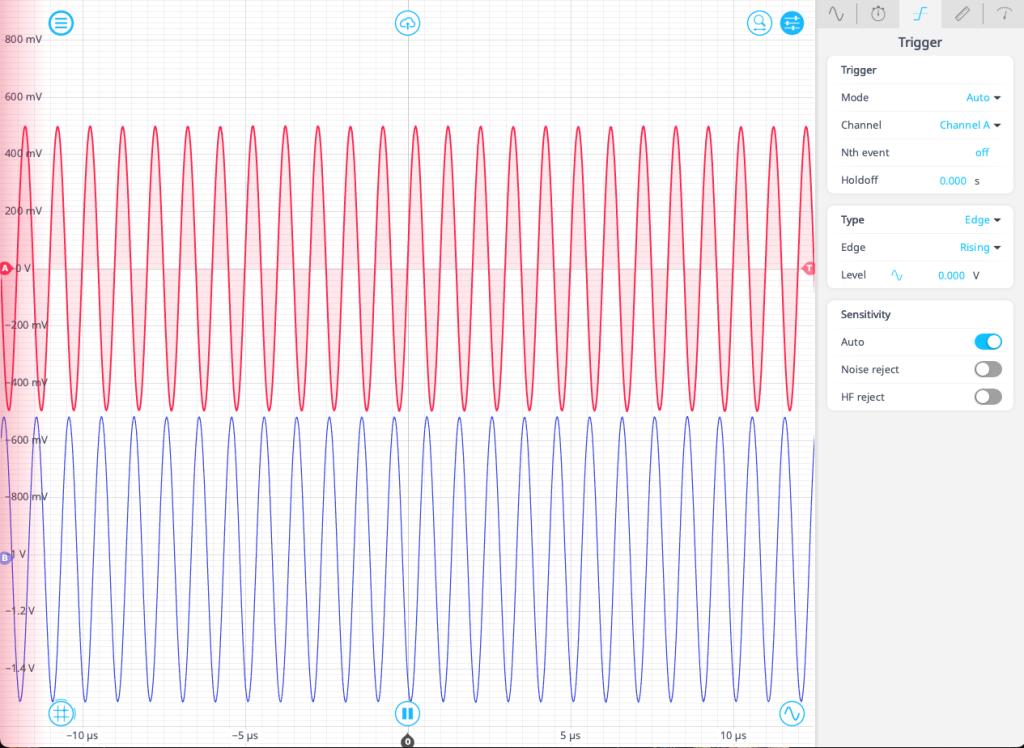
図 2: Moku オシロスコープを使用した XNUMX つの信号の直接キャプチャ。
5. 次のタブのオプションを使えば、簡単に測定項目を追加できます。「追加」をクリックし、測定の種類を選択します。ここでは、各チャンネルに360つずつ、合計3つの周波数測定項目と、BとA間の位相差測定項目を追加します。オシロスコープは各トレースの最大点と最小点を追跡し、式\(\Delta\phi = t_d / t_p \times XNUMX^{\circ}\)を使用して位相遅延を計算します。ここで、\(t_d\)はXNUMXつのトレースの最大値間の時間遅延、\(t_p\)はトレース周期です。これを確認するには、画面上で右クリックし、プロットにXNUMXつの時間マーカー(チャンネルAにXNUMXつ、チャンネルBにXNUMXつ)を追加します。図XNUMXに示すように、各マーカーを極大値に移動します。遅延時間と周期の比を求めることで、計算結果を素早く確認できます。
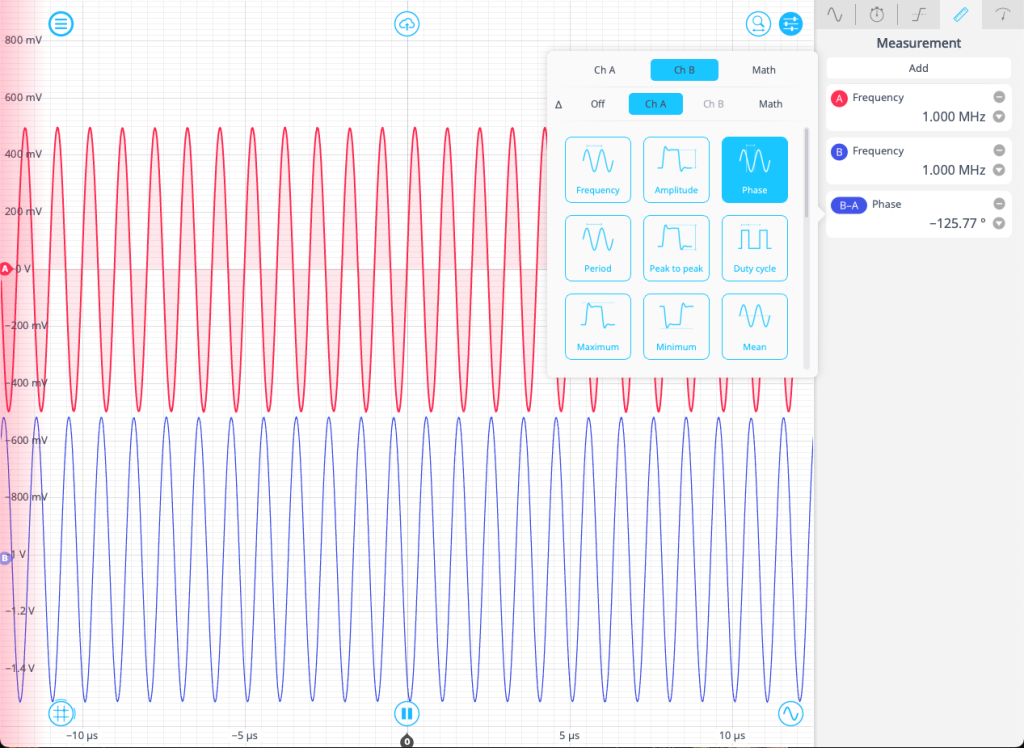
図 3: Moku オシロスコープのマーカーを使用して位相差を測定します。
6. 測定された位相はジッタによって変動し、達成可能な精度が制限されることがわかります。精度をさらに高めるには、[タイムベース] タブに戻って平均化を増やします。これにより、測定された量が安定しますが、速度とデータ内の高速な過渡動作を検出する能力が低下します。ジッタの特性を調べるには、次のセクションを参照してください。
7. ディスプレイ上部の中央にあるクラウド ボタンをクリックすると、トレースを .csv 形式でエクスポートできます。これにより、トレースのスクリーンショットや現在のオシロスコープの設定を記録するオプションも提供されます。
8. あるいは、オシロスコープの XY モードを使用して、4 つの信号のリサージュ曲線をプロットすることもできます。オシロスコープ画面で、演算チャンネルを有効にし、「XY」操作を選択します。これにより、チャンネル A がチャンネル B の関数としてプロットされます。チャンネル A と B を無効にします。信号の周波数が同じ場合、曲線は楕円を形成し、偏心と傾斜が位相情報を表します (図 4 を参照)。4 つの同相信号は直線 (4a) を形成し、XNUMX つの直交信号は円 (XNUMXc) を形成します。曲線が y 軸と交差する点 (A) とプロットが最大値に達する点 (B) にマーカーを設定します。例については、図 XNUMXd を参照してください。位相は次の式を使用して計算できます。
\(\Delta\phi = \pm \arcsin\left({Y_{x=0}/Y_{max}}\right)\)
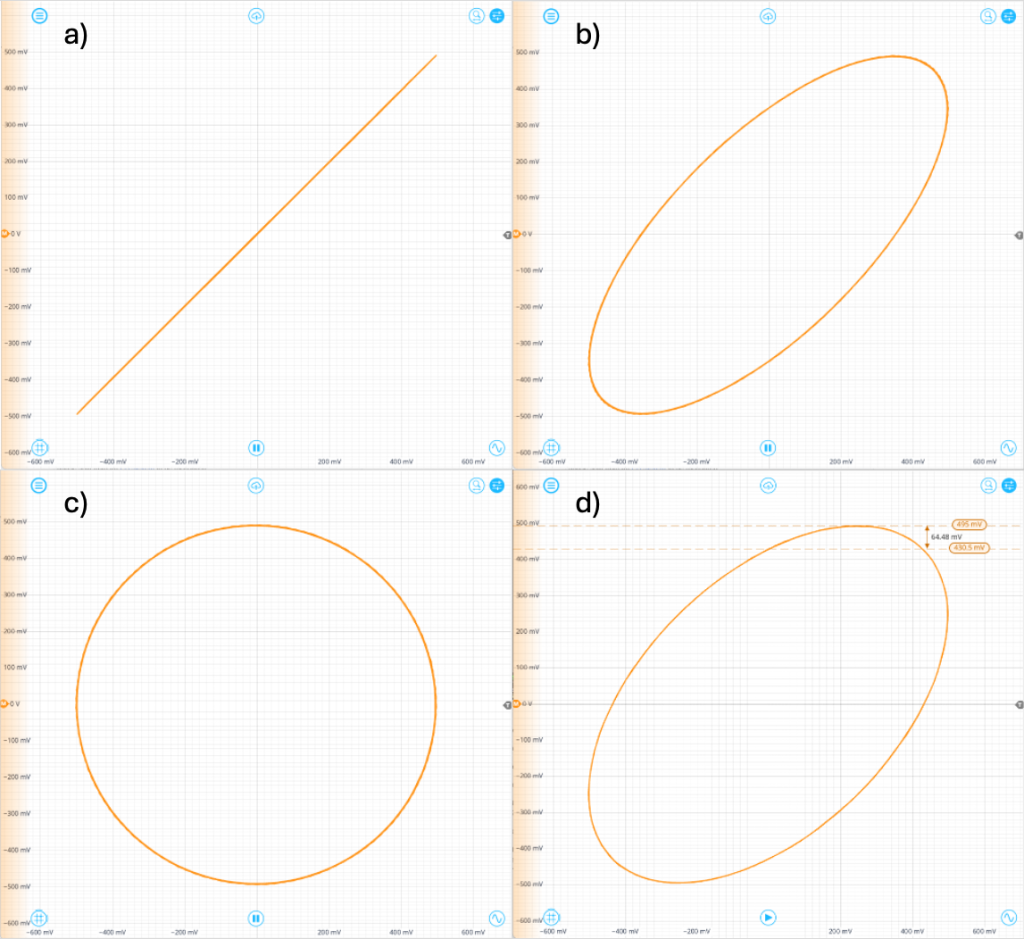
図4: リサージュ曲線 0つの等しい周波数信号の場合。a) 同相(XNUMX°)45° c)の90° d) 位相は次のように計算できます。\(\Delta\phi = \pm \arcsin\left({Y_{x=0}/Y_{max}}\right) = \arcsin\left({430.5 mV/495 mV}\right) = 60^{\circ}\).
オシロスコープは、瞬時の位相測定を安価かつ効率的に行う方法を提供します。これらの理由から、オシロスコープはリアルタイムで迅速にデバッグするのに効果的です。この便利さは、分解能 (通常は最大 1 ~ 2 桁) を犠牲にし、位相測定の範囲を 2π に制限するという代償を伴います。オシロスコープは、信号を直接キャプチャするため、時間依存の動作を測定するのにも便利なツールです。ただし、信号の長期的な傾向やドリフトを追跡することはできません。平均化を行うと、精度を高めるために瞬時の動作に関する知識が犠牲になります。
Mokuタイム&周波数アナライザーによる直接測定
位相の2回目の直接測定は、Mokuなどの時間間隔アナライザを使用して実行できます。 タイム&周波数アナライザこのような計測器は、通常、デジタル遅延ラインを使用して、トリガー イベント間の時間差を正確に測定できます。Moku の場合、この遅延ラインは FPGA 上のソフトウェアによって完全に実装されます。これらの間隔測定は、周期または位相遅延測定に変換できます。Moku 時間および周波数アナライザを使用してこの測定を実行するには、次の手順に従います。
1. テスト対象のデバイスをMokuアナログフロントエンドに接続するか、 マルチインストゥルメントモード 波形発生器 スロット1と オシロスコープ スロット 2 に入力します。この例では、別の Moku デバイスを使用して、相対位相が 1° の 45 MHz 周波数の XNUMX つの同一の正弦波を生成します。
2. 構成に応じて、タイム&周波数アナライザをシングルモードまたはマルチモード(複数計測器モード)で起動します。「イベント」タブで、イベントAとBを有効にします。入力信号の電圧が対応するエッジでしきい値を超えた場合にイベントがトリガーされます。両方のイベントのしきい値を、立ち上がりエッジで0.00Vに設定します。イベント設定については、図5を参照してください。
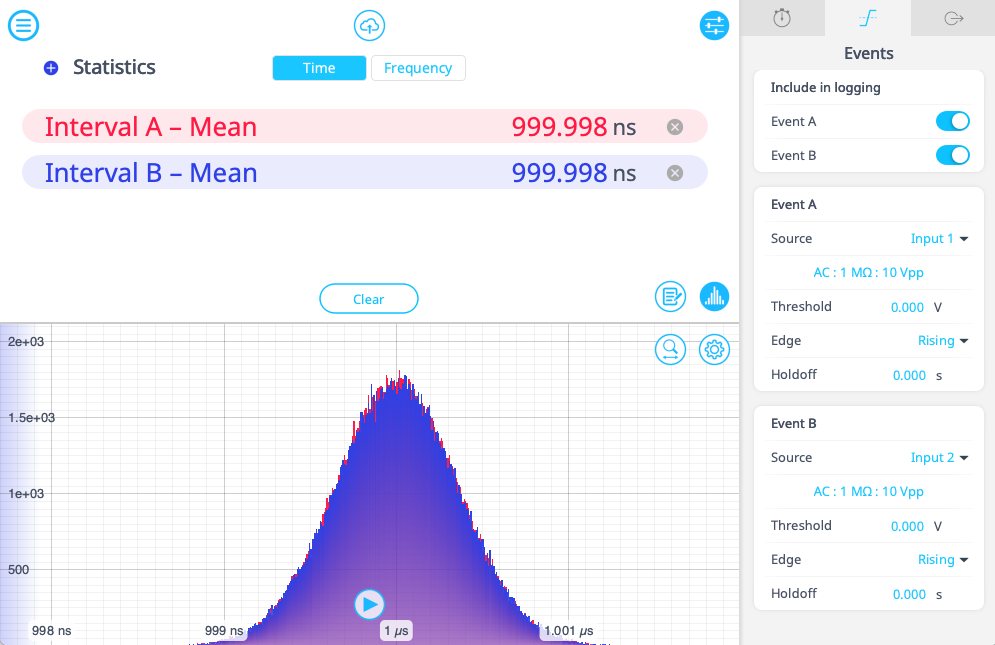
図 5: Moku Time & Frequency Analyzer のイベント構成。
3. [間隔] タブで、間隔 A を有効にし、開始をイベント A、終了をイベント B に設定します。すると、時間 & 周波数アナライザはチャネル A と B のイベント間の間隔を測定し、200 つの周期信号間の時間遅延を示します。間隔 B を有効にし、イベント A からイベント A までを測定するように設定します。[取得] サブメニューで、モードを「ウィンドウ」に変更し、ウィンドウ時間を 200 ミリ秒に変更します。これは、時間 & 周波数アナライザが 6 ミリ秒の期間内に発生するイベントのみをカウントすることを意味します。カウントは後続のウィンドウでリセットされます (図 XNUMX を参照)。
4. メイン メニューから、統計オプションの近くにある「+」をクリックします。これにより、時間と周波数アナライザーによって追跡されているパラメーターのリストに新しい行が追加されます。テキストをクリックすると、追跡する間隔とパラメーターの種類を切り替えることができます。これが関心のあるパラメーターであるため、間隔 A の平均を測定するように設定されていることを確認してください。図 6 に示すように、信号の周期を示す間隔 B の平均を測定する別の統計を追加します。位相差は次の式で計算できます。
\(\Delta\phi = \pm \arcsin\left({Y_{x=0}/Y_{max}}\right)\)
5. ヒストグラムのあるウィンドウをダブルクリックして、関心領域に自動的にスケールします。オシロスコープで位相を測定するのとは対照的に、ヒストグラムには、ウィンドウ期間中に時間と周波数アナライザーによって測定されたすべての間隔が表示されます。これにより、ヒストグラムの形状と分布を介してジッターをリアルタイムで視覚化できます。ヒストグラムの値を分析するには、クラウド アイコンをクリックして、データを .csv 形式でエクスポートします。
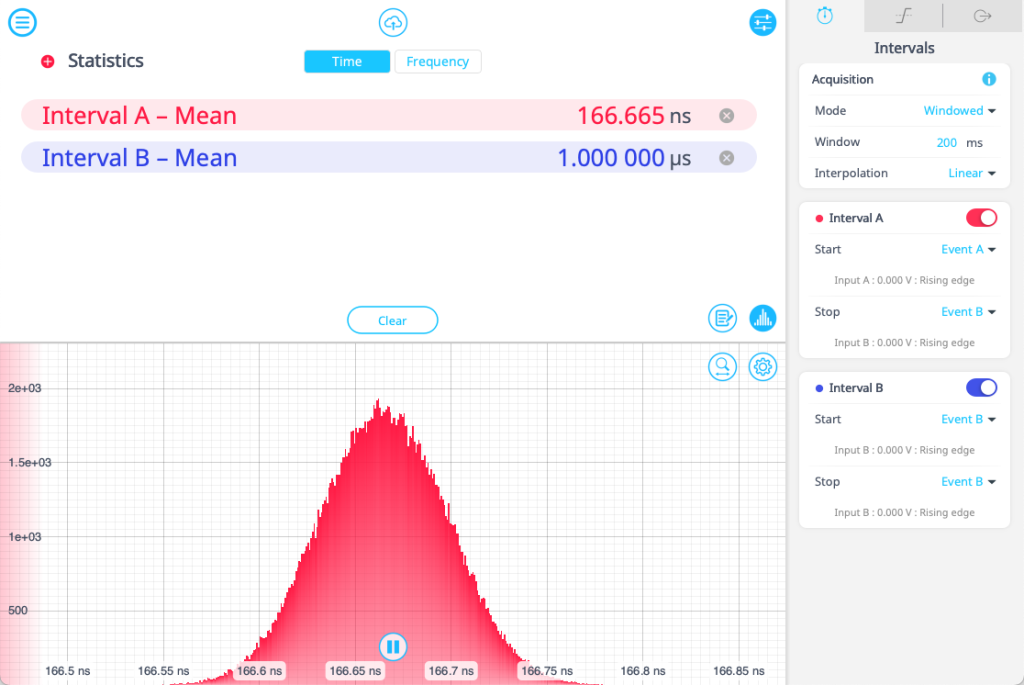
図 6: 間隔設定、統計、ヒストグラムを表示する Moku Time & Frequency Analyzer インターフェース。
6. より詳細な分析のために生のタイムスタンプ付きデータを記録するには、データ ログ アイコンをクリックして収集を開始します (図 7 を参照)。これによりヒストグラムは無効になりますが、ウィンドウの長さが 10 秒に制限されるため、システムの安定性の長期的な変化を追跡できます。
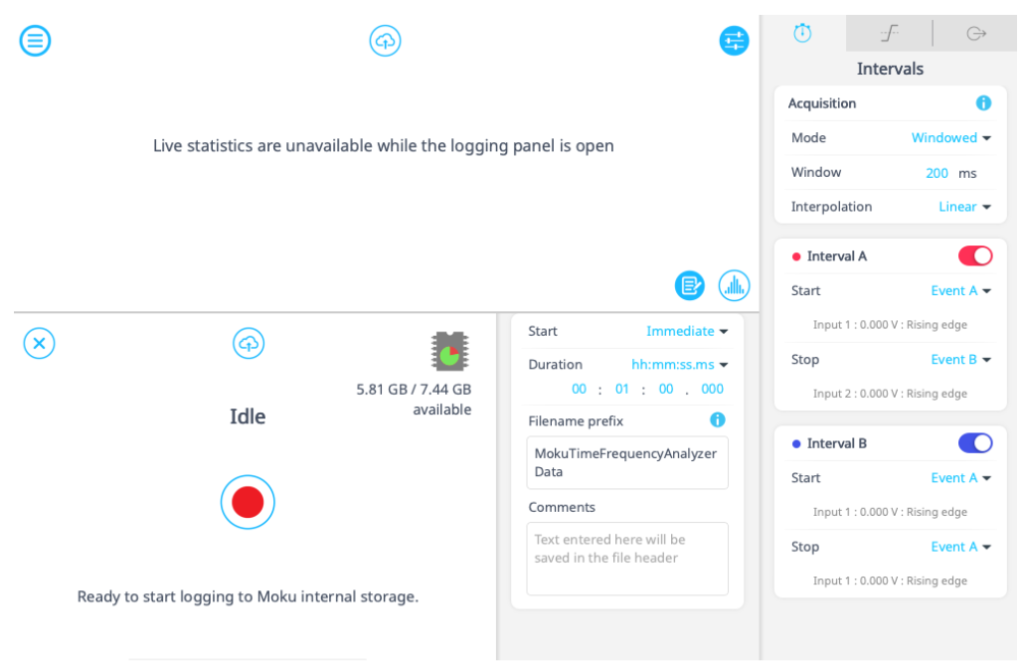
図 7: Moku タイム & 周波数アナライザに組み込まれたデータロガー機器でデータを記録します。
Moku タイム & 周波数アナライザは、位相差を直接測定する方法と、信号の位相安定性またはジッタを推定する方法を提供します。この機器を使用すると、Moku オシロスコープよりもはるかに高い精度でシステムをリアルタイムでデバッグできます。ただし、位相の測定は依然として 2π の範囲に制限されます。精度が向上すると、平均をウィンドウ期間にわたって計算する必要があるため、時間がかかります。ただし、ライブ ヒストグラムと統計により、特定のウィンドウ中に測定された平均、最小、最大間隔に関する情報が提供され、位相のパターンを検出するのに役立ちます。タイムスタンプ付きのデータにより、より長い期間にわたって位相の傾向を追跡し、より正確な位相ノイズ測定を行うことができます。
復調方法
次の 2 つの方法はどちらも復調、つまり信号と基準発振器 (「ローカル発振器」と呼ばれる) の混合を利用して、信号間の位相差に比例した DC 出力を生成します。このアプローチにより、より正確な位相検出が可能になり、長期間にわたって信号を監視できるだけでなく、ノイズに対してもより堅牢になります。
Mokuロックインアンプによるデュアル位相復調
ロックインアンプは、外部または内部ソースから提供される安定した基準発振器を使用して、ノイズの多い背景から周期的な信号を抽出します。Mokuのようなデュアルフェーズソリューションは、 ロックインアンプ 信号から完全な位相と振幅の情報を復元できるため、両方を同時に監視できます。Moku ロックイン アンプを使用して信号を復調するには、次の手順に従います。
1. テスト対象のデバイスをMokuアナログフロントエンドに接続するか、 マルチインストゥルメントモード モクと一緒に 波形発生器 スロット1にMoku発振器を、スロット2にMokuロックインアンプを接続します。この例では、別のMokuデバイスを使用して、周波数1MHz、相対位相45°の1つの同一の正弦波を生成します。測定したい信号がロックインアンプの入力2に入力されていることを確認してください。外部発振器を使用する場合は、入力XNUMXに接続してください。
2. 局部発振器を設定します。ロックイン アンプ画面の右上隅にあるツール アイコンをクリックします。設定に応じて、「内部」または「外部 (PLL)」を選択します。この例では、後者を使用します。同じメニューの「補助」で、「フィルターされた信号」を選択します。これにより、出力 1 と 2 がそれぞれ信号の振幅と位相に設定されます。詳細については、図 8 を参照してください。
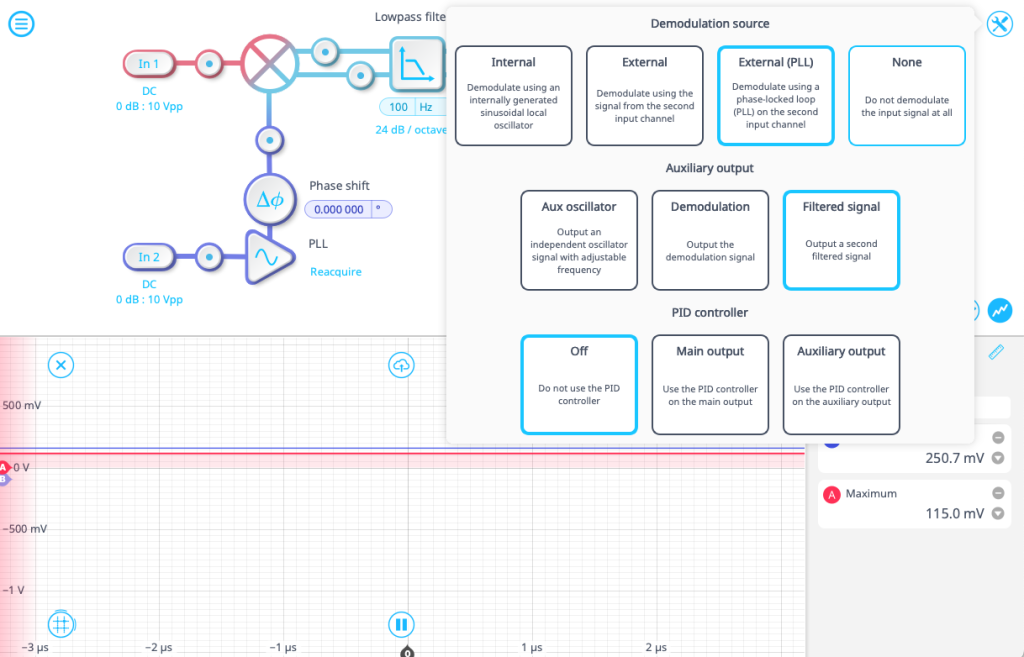
図 8: Moku ロックイン アンプの復調および出力オプション。
3. 組み込みのオシロスコープを有効にし (画面の右下にある信号アイコンをクリック)、図 9 に示すように、信号がミキサーに入る前のプローブ ポイントを選択します。ここから、前述のオシロスコープ メソッドと同じ簡単な位相測定を実行できます。これは、後で検証するための簡単なチェックとして機能します。位相シフトを変更するには、位相ロック ループ (PLL) アイコンの上にあるダイヤルを使用します。それぞれのプローブ ポイントを使用して、PLL の前後の位相を比較できます。
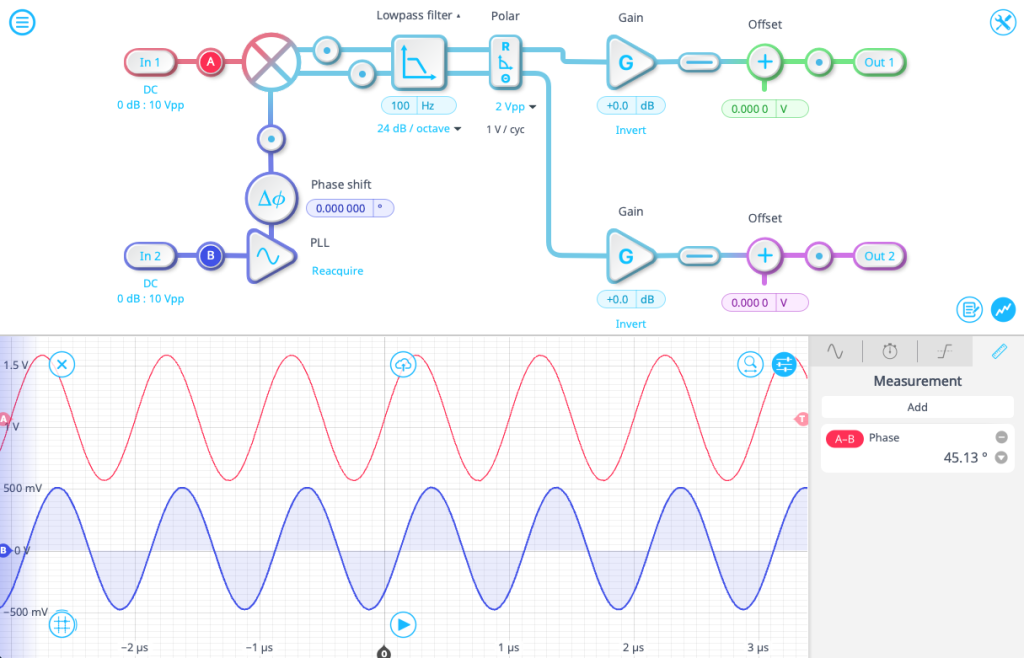
図 9: Moku ロックイン アンプに組み込まれたオシロスコープ。復調前の RF (無線周波数) 信号と LO (局部発振器) 信号を表示します。
4. ミキサーは信号のデジタル復調を実行し、次の式に示すように、互いに位相が 90° ずれた XNUMX つの正弦波を信号に乗算します。
\(\sin{\omega t} \sin{\omega t + \phi} = \frac{1}{2} \left(\cos{(\phi)} – \cos{(2 \omega t + \phi)} \right) \)
\(\sin{\omega t} \cos{\omega t + \phi} = \frac{1}{2} \left(\sin{(\phi)} + \sin{(2 \omega t + \phi)} \right) \)
周波数が同一の場合、「DC」(周波数ゼロ)成分と「高速」(周波数の100倍)成分が残ります。DC成分の振幅は、24つの信号間の位相差によって決まります。次のステップは、「高速」成分を除去することです。これは、ローパスフィルタのショルダー周波数とロールオフを設定することで行います。この例では、カットオフ周波数をXNUMXHz、ロールオフをXNUMXdB/オクターブに設定します。
5. フィルターの横にあるアイコン(現在の設定に応じて「Polar」または「Rect」と表示されている)を確認します。アイコンをクリックすると、極性が切り替わります。ここでは極性表記を使用し、位相データは出力2に出力されます。出力2付近のプローブポイントをクリックすると、オシロスコープに位相情報が表示されます(図10参照)。位相と電圧のスケールは画面に表示されます(1V / cyc)。この変換係数から、信号と局部発振器間の相対位相を取得できます。
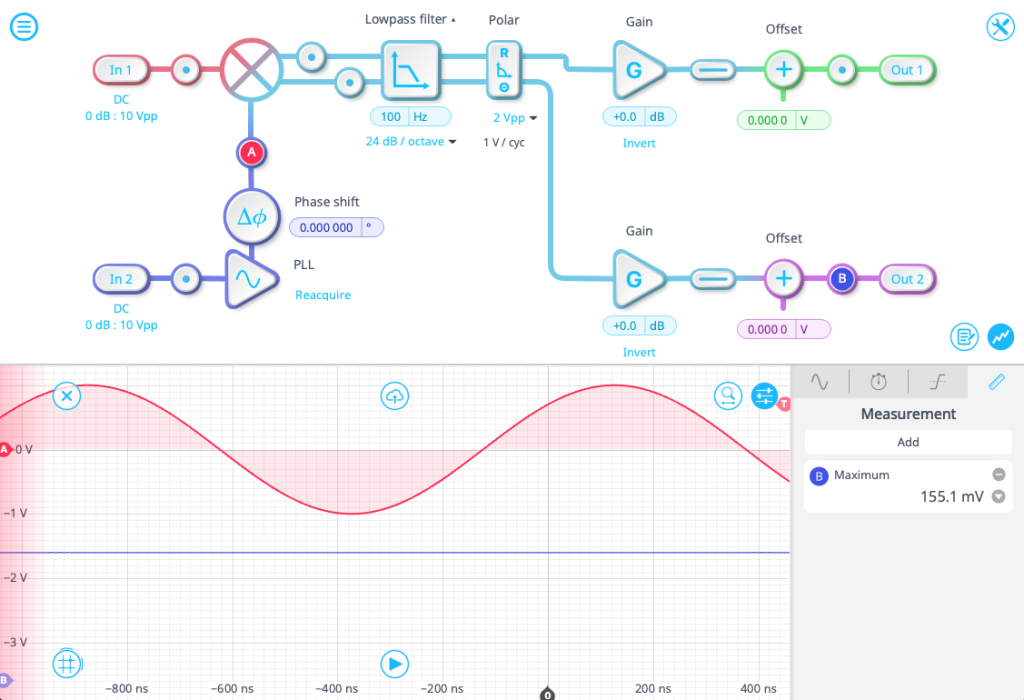
図 10: 出力位相信号。電圧の大きさは計算された位相差を表します。曲線が平坦であることは、RF 信号と LO 信号間の位相差が安定していることを示しています。
Moku ロックイン アンプのようなデジタル ソリューションは、復調された位相と振幅の情報を時間の関数として表示できるため、正確な位相測定に最適なツールです。Moku は、追加の組み込み機器を使用して、より多くのフィードバックとデータ ロギング オプションを提供します。
ロックイン アンプはノイズ性能にも優れています。一方、帯域幅はローパス フィルターによって制限されるため、周波数が大きくずれると信号がフィルターの外側に落ちる可能性があります。Moku オシロスコープやタイム & 周波数アナライザーと同様に、ロックイン アンプも 2π を超える位相変化を検出できません。
Moku 位相計による位相ロック ループ (PLL)
位相検出の最後の方法は、位相計と呼ばれる装置を使用する。Moku 位相計 は概念的には Moku ロックイン アンプと似ています。どちらもデュアル位相復調を使用して、入力信号から振幅と位相情報を抽出します。ただし、Moku 位相計は、固定のローカル オシレータに頼るのではなく、フィードバック ループまたは位相ロック ループ (PLL) を使用して入力信号周波数を追跡します。図 11 に示すように、ロックイン アンプの独立した LO は、入力電圧に比例した周波数を出力する電圧制御発振器 (VCO) に置き換えられています。この入力は、復調された位相信号によって提供され、負のフィードバック ループを形成します。入力信号が現在の VCO 出力からドリフトすると、位相電圧が変化し、VCO の出力を修正するのに役立ちます。最後に、積分器が時間の経過と共にエラー信号を累積し、Moku 位相計が振幅、周波数、位相情報を同時に追跡できるようにします。
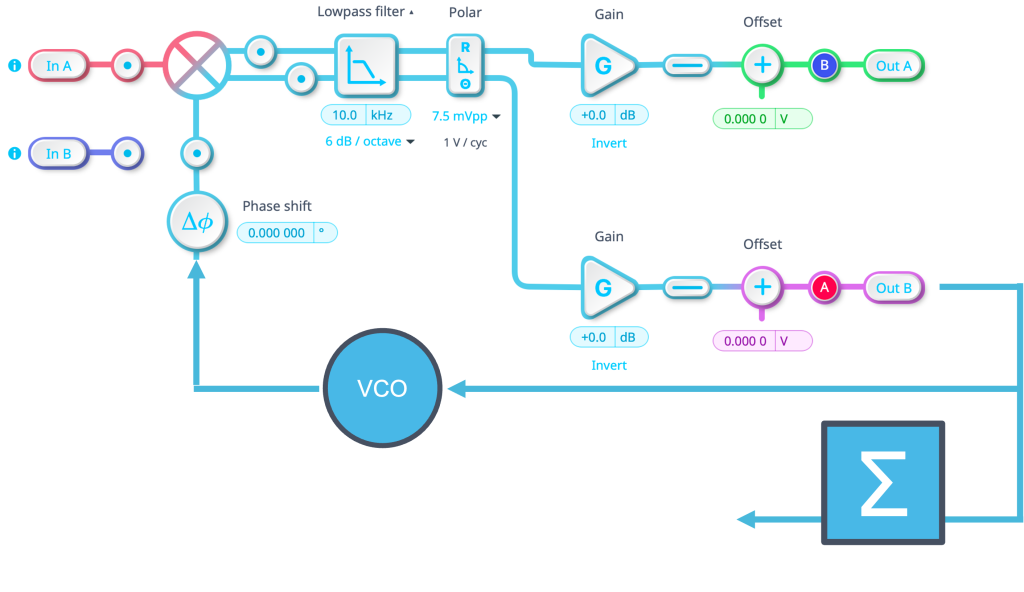
図 11: Moku 位相計のブロック図。復調プロセスは Moku ロックイン アンプと似ていますが、位相ロック ループを完成させる VCO と積分器が追加されています。
Moku Phasemeter を使用して信号を追跡するには、次の手順に従います。
1. テスト対象のデバイスをMokuアナログフロントエンドに接続するか、 マルチインストゥルメントモード 波形発生器 スロット 1 に Moku を、スロット 2 に位相計を配置します。この例では、別の Moku を使用して、相対位相が 1° である 45 MHz 周波数の XNUMX つの同一の正弦波を生成します。
2. 画面右側のパネルで、入力1と2が有効になっていない場合は有効にします。局部発振器の周波数を固定するか、PLLを使用して入力周波数を自動検出するかを選択できます。図1に示すように、ここでは12MHzの固定周波数を選択します。
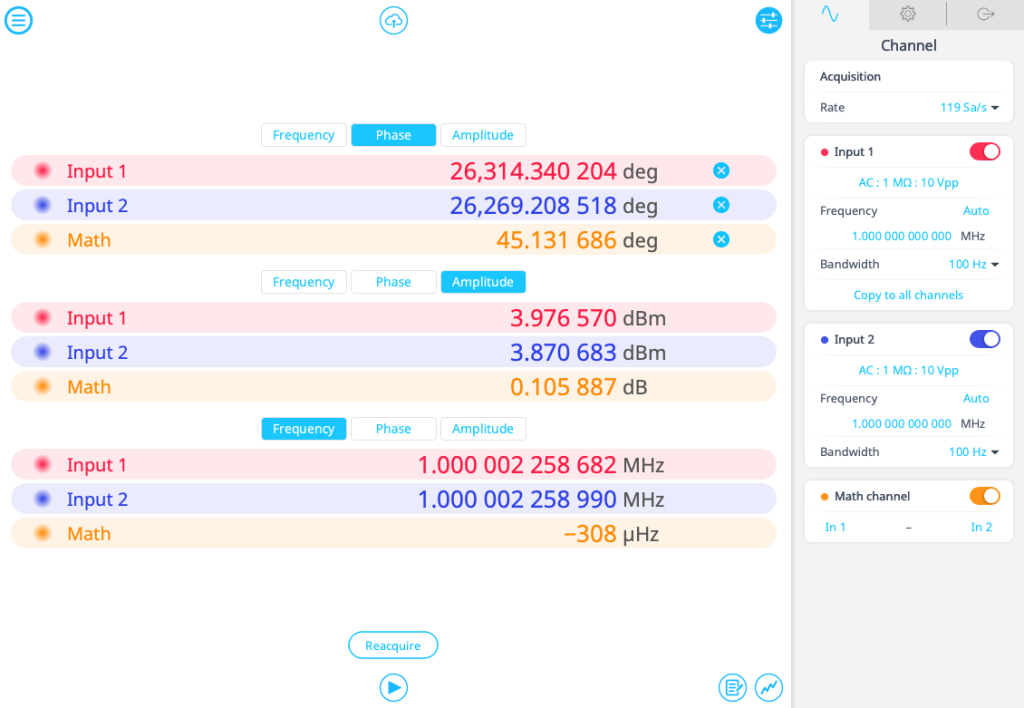
図 12: Moku 位相計の位相ロック ループの基本構成。
3. ドロップダウンメニューから希望の帯域幅を選択します。Mokuロックインアンプと同様に、帯域幅は可能な限り低く設定することが望ましいですが、信号プロファイル全体がその範囲内に収まるようにしてください。ここでは10Hzを選択してください。
4. Moku 位相計は、VCO 周波数を基準として各信号の位相を個別に測定します。1 つの入力信号間の位相差を測定するには、Math チャンネルを有効にします。デフォルトでは、入力 2 と入力 XNUMX 間の差が測定されます。
5. 位相、周波数、振幅をリアルタイムで監視できます。情報を表示するには、適切なボタンをクリックします。これらの値は、図 13 に示すように、右下隅の信号ボタンをクリックすると、リアルタイムでプロットすることもできます。記録された値はプロットに入力され、「再取得」をクリックするとリセットできます。データをリアルタイムで視覚化すると、Moku:Pro での信号取得が 596 Sa/s に制限されることに注意してください。XNUMX つの入力信号間の位相差を記録する Math チャネルの値に注意してください。

図 13: Moku 位相計を使用した位相情報のリアルタイム記録。
6. より高速なデータ記録が必要な場合は、データ ロギング アイコン (信号視覚化ボタンの横にあります) をクリックします。これにより、組み込みデータ ロガー機器のオプションが開きます。レート、期間、遅延時間を選択でき、手動でデータ収集を開始することもできます。完了したら、開始ボタンの上にあるクラウド ボタンを使用して、データ ファイルをデバイスから転送できます (図 14 を参照)。
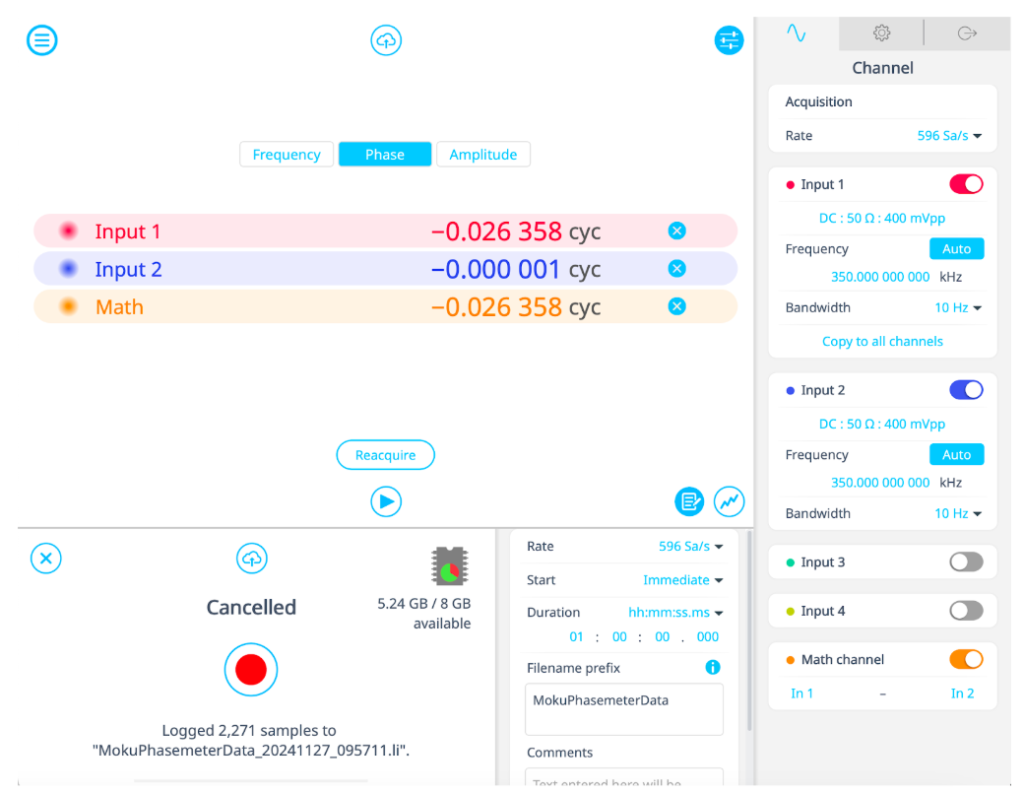 図 14: Moku 位相計に組み込まれたデータロガー機器。
図 14: Moku 位相計に組み込まれたデータロガー機器。
Moku 位相計は、最大 4 つの入力信号について、復調された位相、振幅、周波数情報を時間の関数として追跡し、データの視覚化とログ記録のオプションを備えています。このガイドで説明されている他の 3 つの位相検出方法とは異なり、位相計は、広範囲の値にわたって入力周波数を自動的に追跡する PLL を使用します。また、マイクロラジアンの精度で、完全なアンラップ位相情報を測定することもできます。Moku ロックイン アンプと比較すると、位相計の入力周波数範囲は狭く、PLL が機能するには強力な入力信号も必要です。ロックイン アンプにはそのような要件がなく、低ノイズ環境で優れたパフォーマンスを発揮します。
結論と展望
正確な位相検出は、幅広い科学アプリケーションにとって重要です。位相を測定する方法は数多くあり、それぞれに長所と短所があります。このガイドでは、FPGA ベースの Moku プラットフォームで利用できる再構成可能な計測器スイートを使用して位相を検出する 4 つの方法について説明しました。
Mokuを使用するかどうか オシロスコープ 迅速なデバッグのために、 タイム&周波数アナライザ 長期安定性分析では、 ロックインアンプ 低騒音性能、または 位相計 最高の精度を得るために、Mokuではセットアップに必要な測定を実行できます。さらに、Mokuには次のような他のツールも多数用意されています。 マルチインストゥルメントモード, Mokuクラウドコンパイル ニューラルネットワーク 効率的な制御とデータ分析を実現します。
Mokuプラットフォームの詳細 こちら楽器を自分で調べるには、 デスクトップアプリ デモモードを選択します。
ご質問がある場合
ナレッジベースのFAQから回答を見つけてください
機器の機能や使い方についてご質問がある場合は、ナレッジベースをご覧ください。また、人気の記事をすばやく表示したり、製品やトピックで検索を絞り込むこともできます。
ユーザーフォーラムに参加してください
新機能のご提案がありますか?あるいは、ヒントを共有したいですか?ユーザーフォーラムでは、使用例、新機能の発表、製品のアップデートなど、Liquid Instrumentsとグローバルユーザーコミュニティとのつながりをワンストップで提供しています。