



다중 장비 모드 Moku:Pro에서는 레이저를 광학 공동에 고정할 수 있습니다. 레이저 락 박스 또한 Bode 플롯을 사용하여 측정합니다. 진동수 응답 분석기 추가 테스트 장비나 배선 없이도 오류 신호에 외란을 주입하고 주파수 응답 분석기를 사용하여 전달 함수를 측정함으로써 폐루프 이득, 위상 마진, 루프 외란 제거 성능을 확인할 수 있습니다. 주파수 응답 분석기와 레이저 잠금 장치(Laser Lock Box)를 빠르게 전환할 수 있는 유연성 덕분에 조정이 편리합니다. PID 매개변수 루프 성능을 최적화하여 안정성을 보장하고 교란 억제를 극대화합니다.
분자 및 원자 물리학 응용 분야와 같이 고도의 정밀성을 요하는 측정에서는 장기간 우수한 안정성을 특징으로하는 능동 주파수 노이즈 억제기 탑재형 레이저 시스템이 널리 사용됩니다. 안정적인 레이저 락인을 달성하려면 고도로 최적화된 피드백 컨트롤러가 필요합니다. 이를 위해서는 다음의 값들이 측정되어야 합니다. 1) 루프 안정성을 유지하기 위해 단위 이득 진동수를 낮게 유지하면서 낮은 진동수에서 충분한 이득이 있는지 확인하는 제어 루프의 전달 함수 2) 외란 제거, 즉 외란이 레이저에 결합되어 전체 시스템을 통과한 후의 진동 함수 값입니다.
전달 함수는 일반적으로 설정된 진동수 범위 내에서 얻은 루프의 게인과 위상 변이를 나타내는 보드 선도로 구성됩니다. 폐쇄 루프 방해 제거 측정 시에 가장 큰 걸림돌은 피드백 제어를 유지함과 동시에 노이즈를 포함해야한다는 것 입니다. 일반적으로 이러한 시스템 설정은 매우 복잡하기에 주입 방법인 노이즈 소스와 응답을 측정하기 위한 네트워크 분석기 양측 모두가 필요합니다.
이번 어플리케이션 노트에서는 다중 장비 모드 on Moku:Pro 를 이용하여 레이저 안정화 시스템의 개방 루프 및 폐쇄 루프의 특성을 드러내는 방법에 대하여 다루어보겠습니다. Moku:Pro를 사용하면 레이저를 캐비티에 고정하고 외란을 부여하고 개방 루프, 폐쇄 루프 및 외란 전달 기능을 동시에 측정할 수 있습니다. PID 매개변수를 조정하여 루프 구성을 최적화하는 것으로 안정성을 보장하고 외란 억제기능을 강화시키고, 진동수에 발생하는 노이즈를 억제할 수 있습니다. Moku:Pro는 이러한 기능을 제공하는 간결하고 효율적인 레이저 안정화 및 특성화 솔루션입니다.
피드백 제어 기본 사항
레이저 잠금 시스템을 더 잘 이해하려면 먼저 일반적인 것에 대한 간략한 검토부터 시작해야 합니다. 피드백 제어. 이 섹션에서 교란 제거 방정식을 분석하고 도출함으로써 교란을 주입할 위치와 루프 응답을 조사할 위치를 결정할 수 있습니다. 파운드-드레버-홀 (PDH) 잠금 절차.
일반적으로 제어 시스템은 개방 루프 제어 시스템과 폐쇄 루프 제어 시스템의 두 가지 유형으로 나눌 수 있습니다. 둘 간의 큰 차이는 전자의 제어 동작은 시스템의 출력과 독립적인 반면, 후자는 출력 종속 제어 동작을 갖는다는 것입니다[1]. 일반 피드백 제어 루프의 기본 발상은 현재 작동 지점과 기준 간의 차이를 오류 신호로 사용하여 일정한 설정 지점에서 작동하는 시스템의 출력을 유지하는 것입니다[1]. 레이저 안정화를 위한 PDH 락 기술은 캐비티 반사를 활용하여 오류 신호를 생성합니다. 이 오류 신호는 레이저로 피드백되어 레이저 진동수 노이즈를 최소화하면서 광원 레이저를 특정 진동수로 유지합니다. 이것은 폐쇄 루프 제어로 간주됩니다[2]. 기본 피드백 제어 시스템은 일반적으로 그림 1에 표시된 대로 플랜트(제어 대상), 센서(플랜트 출력 측정), 컨트롤러(피드백 입력 생성)라는 세 가지 구성 요소로 구성됩니다.
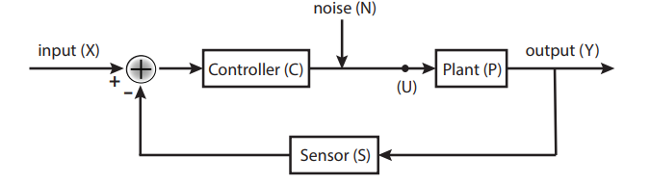
그림 1 : 일반적인 피드백 제어 시스템의 블록 다이어그램. 이는 플랜트(P), 특정 신호를 측정하는 센서(S), 플랜트에 대한 입력을 생성하는 액추에이터 또는 컨트롤러(C)의 세 가지 주요 목표로 구성됩니다.
라플라스 변환을 사용하여 제어 시스템의 전달 함수를 유도할 수 있습니다. 이 함수는 주어진 시간 영역 신호 f(t)에 대해 F(s)로 정의됩니다.
\(F(s) = \int{e^{-st} f(t) dt}\)
그림 1에 표시된 시스템의 경우 세 가지 구성 요소 각각은 고유한 전달 함수를 가지며 이를 \(P(s)\)로 표시합니다., 플랜트, 센서, 컨트롤러에 대해 각각 \(S(s)\), \(C(s)\)를 사용합니다. 다음 유도 과정을 단순화하기 위해 추가적인 내부 신호를 도입하여 \(U(s)\)로 명명했습니다. 입력 신호 \(X(s)\)를 사용하여 다음과 같은 시스템을 통과한 후의 출력 신호를 계산할 수 있습니다.
\(Y(s) = U(s)P(s)\)
\(U(s) = C(s) \왼쪽( X(s) – Y(s)S(s) \오른쪽)\)
위 방정식에 따르면 피드백 시스템의 전달 함수는 다음과 같습니다. \(H(s)\), 출력의 라플라스 변환과 입력의 라플라스 변환의 비율로 다음과 같이 유도할 수 있습니다.
\(H(들) = \frac{Y(들)}{X(들)} = \frac{C(들)P(들)}{1+C(들)P(들)S(들)}\)
여기서 \(C(s)P(s)S(s)\)는 시스템의 개방 루프 이득(반환 비율이라고도 함)이고 \(H(s)\)는 폐쇄 루프 이득입니다. 지금까지의 분석은 신호 변환에 초점을 맞추었지만, 실제 상황에서는 잡음 억제에 더 중점을 둡니다. 잡음은 루프 내 어디에서든 발생할 수 있지만, 여기서는 플랜트에서 발생하는 잡음을 고려합니다(다른 잡음원도 동일한 절차로 분석할 수 있습니다). 잡음 \(N(s)\)을 분석에 적용하면 시스템 출력은 다음과 같이 수정됩니다.
\(Y(들) = \frac{C(들)P(들)}{1+C(들)P(들)S(들)}X(들) + \frac{1}{1+C(들)P(들)S(들)}N(들)\)
제어기 이득(\(C(s) \rightarrow \infty \))이 큰 시스템의 경우, 시스템 출력은 입력에 가까워지는데, 이를 단위 이득이라고도 합니다. 외부 외란으로 인해 플랜트에 유입된 잡음 또한 0에 가까워지도록 극적으로 억제됩니다. 이러한 외란의 전달 함수는 외란 제거(또는 감도 함수)라고도 하며, 플랜트 출력에 발생하는 외란에 대한 제어 시스템의 민감도를 나타냅니다. 개방 루프 전달 함수와 마찬가지로, 외란 제거도 주파수에 따라 달라집니다. 외란 제거의 진폭이 단위 이득을 초과하면 이러한 잡음 억제 효과가 사라지고, 따라서 해당 주파수를 단위 이득 주파수라고 합니다. 더 중요한 것은, 개방 루프 이득의 위상이 180도(1 + C(s)P(s)S(s) = 0일 때의 폐쇄 루프 극점)에 도달하면 잡음이 증폭되어 시스템이 불안정해진다는 것입니다. 특히 C(s)P(s)S(s)가 -1에 가까워질 때 더욱 그렇습니다. 이러한 전환점은 위상 여유라고 하는 피드백 시스템의 또 다른 중요한 매개변수입니다. 제어 루프의 대역폭은 단위 이득 주파수와 위상 여유 모두에 의해 제한되며, 위상 여유가 단위 이득 주파수보다 낮은 주파수에서 발생하면 시스템은 안정될 수 없습니다.
레이저를 이용한 피드백 제어
아래의 레이저 안정화 시스템은 이전 섹션에서 설명한 피드백 제어 루프와 동일합니다. 이 어플리케이션 노트에서 레이저는 PDH 락 방식을 사용하는 피드백 제어 루프를 통해 광 공동에 안정화됩니다. PDH 락 기술에 대한 세부정보는 여기에서 보실 수 있습니다. 그림 2는 내부 PZT 액추에이터와 결합된 외부 서보에 의해 형성된 레이저 안정화 프로세스의 피드백 루프를 보여줍니다.

그림 2 : 레이저 파장을 캐비티 공진에 락하기 위한 개념적 피드백 제어 루프의 블록 다이어그램. PID 컨트롤러는 레이저 내부의 PZT 변환기인 액추에이터를 제어합니다.
안정화 시스템은 레이저를 플랜트라고 하고, 그 주파수를 시스템의 출력 Y(s)라고 해석할 수 있습니다. 시스템이 안정화를 시도하는 설정점은 기준 캐비티의 공진 주파수입니다. 출력은 광 주파수 판별기의 설정점과 비교됩니다. 센서는 광학 및 광전자를 포함하는 이러한 신호(S(s)) 간의 차이를 측정하여 컨트롤러에서 추가 처리되는 오류 신호를 생성합니다. 일반적으로 컨트롤러는 서보(C(s))라고도 합니다. 컨트롤러는 플랜트의 특성을 고려하여 위치 오차를 줄이고 작동 시 오버슈트를 최적화하는 제어 신호를 제공합니다. 여기서 사용되는 레이저(플랜트)는 일반적으로 가변 레이저이며, 제어 신호에 따라 내부 PZT 변환기를 통해 주파수를 변조할 수 있습니다. 따라서 제어 신호가 레이저에 입력되면 최종 출력 파장이 생성됩니다. 마지막으로, 이 출력은 피드백되어 피드백 신호를 업데이트합니다.
액추에이터의 응답을 기반으로 컨트롤러의 응답과 PID 설정을 신중하게 구현하여 안정적인 피드백과 충분한 소음 억제를 보장해야 합니다. 이를 더 잘 이해하기 위해 외란 제거를 측정하여 폐쇄 루프 응답을 전체 시스템으로 특성화할 수 있습니다. 우리는 Vin 지점에서 스위프 신호를 입력하고 Vout 지점에서 결과값을 추출하면 됩니다. 해당 진동수 응답은 다음과 같이 파생될 수 있습니다.
\(\frac{V_{아웃}(초)}{V_{인}(초)} = \frac{1}{1+C(초)P(초)S(초)}\)
\(-\frac{\text{오류 신호}}{V_{in}(s)} = \frac{C(s)P(s)S(s)}{1+C(s)P(s)S(s)}\)
\(-\frac{\text{오류 신호}}{V_{out}(s)} = C(s)P(s)S(s)\)
여기서 \(C(s)\), \(P(s)\) 및 \(S(s)\)는 제어기(서보), 설비(PZT 액추에이터), 그리고 센서의 동작을 나타냅니다. 위 방정식의 표현식은 외란 제거를 나타내고, 다음은 상보 감도 함수를 나타내며, 마지막은 제어 시스템의 개루프 이득을 나타냅니다.
실험 설정
이 실험에서 Moku:Pro는 레이저 잠금 장치 역할을 할 뿐만 아니라 시스템의 폐쇄 루프 응답 특성도 분석합니다. 그림 3은 전체 시스템 구성을 보여주고, 그림 4는 다중 계측기 모드 구성을 보여줍니다. 목표를 달성하기 위해 네 개의 계측기를 네 개의 독립적인 슬롯에 배치했습니다. 레이저 락 박스, 락인 증폭기, PID 컨트롤러글렌데일 진동수 응답 분석기.
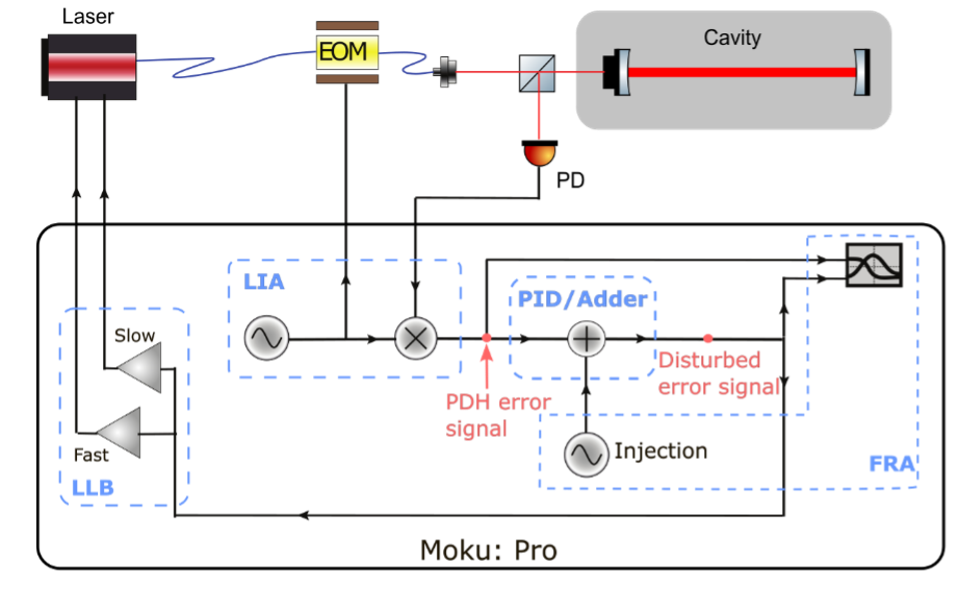
그림 3 : 루프 내 특성을 분석하는 실험 설정 방해 거부 레이저 안정화 시스템의 방해 거부 레이저는 Moku:Pro용 레이저 잠금 상자로 외부 참조 공동에 잠겨 있는 동안 주파수 응답 분석기 장비를 사용하여 직접 측정 및 생성되었습니다.. 주입 또는 가산은 0 dB 비례 이득 설정이 있는 PID 컨트롤러 기기를 사용하여 달성됩니다.

그림 4 : 다중 악기 모드에서 Moku:Pro 구성. 네 개의 슬롯은 서로 완전히 독립적이므로 슬롯에 추가된 악기의 순서는 중요하지 않습니다.
교란은 오류 신호 복조 후, 그러나 제어기로 전파되기 전에 주입됩니다. 따라서 레이저 잠금 절차를 두 개의 별도 프로세스로 분리했습니다. 하나는 출력 1을 통해 전기 광학 변조기(EOM)로 변조 신호를 생성하고 오류 신호를 복조하는 잠금 증폭기(Lock-in Amplifier)이고, 다른 하나는 복조 프로세스를 생략하고 서보 또는 제어 신호만 레이저로 되돌려 보내는 레이저 잠금 상자(Laser Lock Box)입니다. 레이저 잠금 상자의 고속 PID 제어기에서 출력된 출력 2는 레이저의 피에조에 직접 연결되어 레이저 주파수를 미세하게 조정하고, 출력 3은 레이저의 온도 제어에 연결했습니다.
동시에 주파수 응답 분석기 장비를 사용하여 폐루프 교란 제거를 측정했는데, 이 장비는 스윕 사인파 진폭을 생성하여 PID 컨트롤러 장비를 가산기로 사용하여 인루프 신호(In 1)에 주입했습니다. 이 합산 접합을 달성하기 위해 입력 행렬을 \([(1, 1), (0,1)]\)로 설정하고 비례 이득을 0 dB로 설정하여 PID 컨트롤러를 가산기로 구성했습니다. 가산기의 출력은 두 개의 경로로 분할되었습니다. 하나는 레이저 잠금 상자에 대한 오차 신호를 제공하고 다른 하나는 주파수 응답 분석기의 채널 B에 연결되어 폐루프 주파수 응답을 측정했습니다. 채널 A는 사인파를 주입하기 전에 인루프 주파수 잡음을 기록했습니다.
레이저 잠금 상자(Laser Lock Box)가 서보 동작을 담당했습니다. PDH 오류 신호는 램프 스캔으로 모니터링한 후, 느린 온도 오프셋을 조정하여 캐비티 공진을 스캐닝 범위의 중간 지점에 가깝게 조정했습니다. 그런 다음 시스템 안정화 전에 과도한 보상을 방지하기 위해 적분기 포화를 활성화했습니다. 그런 다음 캐리어의 영점 교차점을 잠금 지점으로 선택하고 고속 PID 제어기를 활성화하는 "잠금 지원(Lock Assist)" 기능을 사용하여 잠금을 활성화했습니다. 마지막으로, 저주파에서 더 높은 이득을 얻기 위해 적분기 포화를 비활성화하여 전체 적분기를 활성화했습니다. 레이저 잠금 상자에 대한 자세한 설명을 참조하세요. 여기에서 확인하세요..
레이저 주파수를 공동에 성공적으로 고정한 후, 관심 장비를 주파수 응답 분석기로 전환했습니다. 주파수 응답 분석기에서는 측정을 (입력 ÷ 출력)으로 구성하고 두 채널 모두 충분히 작은 출력 신호(5 mVpp)를 출력했습니다. 관심 주파수 범위에 걸쳐 주파수 소스를 스위핑하여 전달 함수를 생성했습니다.
실험 결과
그림 5로 나타낸 측정 결과를 보아주십시오.
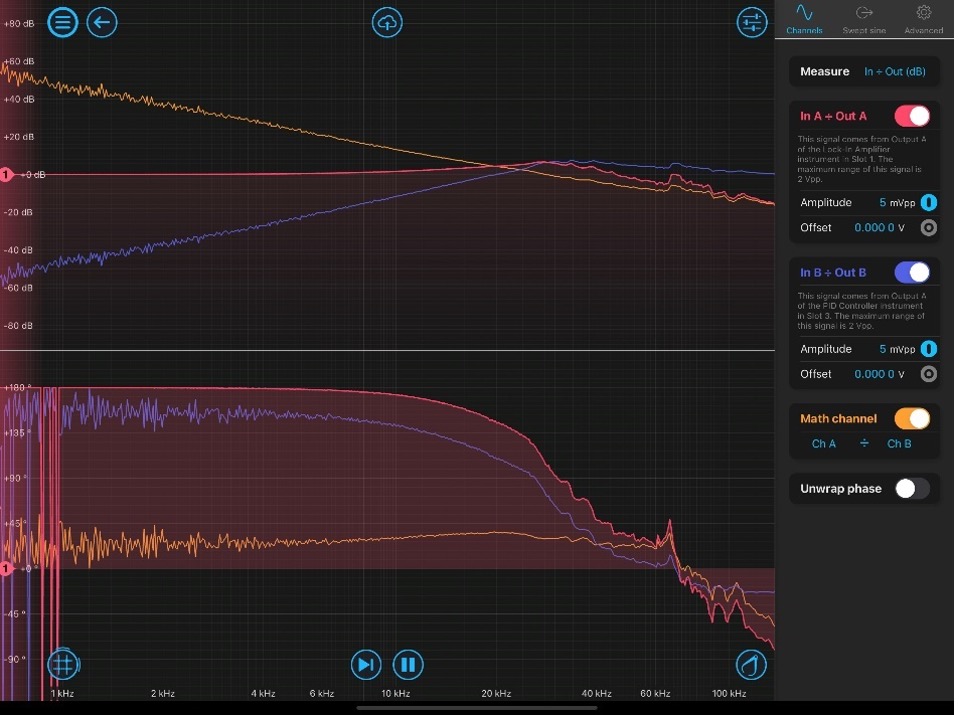
그림 5 : 측정된 전달 함수는 전체 폐쇄 루프 응답(빨간색), 폐쇄 루프 외란 제거(파란색) 및 계산된 레이저 락 시스템의 개방 루프 이득(주황색)을 보여줍니다. 외란 제거의 단위 이득 진동수는 약 24kHz입니다.
빨간색 트레이스는 측정된 상보적 전달 함수(식 7)를 나타내고, 파란색 트레이스는 교란 제거(식 6)를 나타냅니다. 수학 채널(ChA ÷ ChB)을 사용하여 그림 5의 주황색 트레이스로 표시된 개방 루프 전달 함수를 동적으로 계산할 수 있습니다. 파란색 트레이스(또는 주황색 트레이스)에서 잠금 루프의 위상 여유가 24도를 약간 넘는 최대 ~90kHz의 단위 이득 주파수를 갖는 것을 확인할 수 있습니다. 이 시스템의 잠금 대역폭 한계는 PZT의 기계적 공진에서 비롯됩니다. 플롯에서 ~63kHz에서 기계적 공진이 있음을 알 수 있습니다. 따라서 시스템을 더 높은 이득으로 밀어붙이면 공진 진동이 발생하여 이 특정 주파수 지점에서 양의 피드백이 발생하고 시스템이 불안정해질 수 있습니다.
또한, 개방 루프 응답(주황색 트레이스)에서 저주파 이득이 60dB에 도달하는 것을 확인할 수 있습니다. 이는 파란색 트레이스의 -60dB 섭동 억제와 일치하며, 레이저 잠금 장치(Laser Lock Box) 장비가 레이저 주파수 잡음을 충분히 억제하고 안정적인 잠금 상태를 유지할 수 있는 적절한 서보 이득을 제공할 수 있음을 나타냅니다.
제품 개요
Moku:Pro의 유연한 FPGA(Field-Programmable Gate Array) 기반 접근 방식은 기존 고정 기능 테스트 및 측정 하드웨어의 여러 단점을 해결합니다. FPGA 기반 아키텍처는 계측기 간 동적으로 전환할 수 있는 기능을 제공합니다. 또한 여러 계측기를 동시에 사용할 수 있는 기능도 제공합니다. 예를 들어, 주파수 응답 분석기(Frequency Response Analyzer)를 사용하여 레이저 잠금 루프 전달 함수를 특성화하는 동시에 레이저 잠금 박스(Laser Lock Box)를 사용하여 안정적인 잠금 상태를 유지할 수 있습니다. 다중 계측기 모드는 루프 구성 최적화 과정을 훨씬 더 간단하고 효율적으로 만들어줍니다. 직관적인 사용자 인터페이스는 실험 설정의 복잡성을 크게 줄여 더욱 접근성이 높고 유연한 솔루션을 제공합니다.
그리고 본 어플리케이션 노트에서는 PDH 락 방식을 활용하는 예를 보여드렸습니다만, 제어 루프 응답을 검증하는 이 방법은 DC 락, 프린지 사이드 락, 틸트 락과 같은 다른 락 기술에도 적용되어 레이저 진동수 안정화 분야에서 훨씬 다양한 용례가 있을 수 있습니다.
감사의 글
상세 연구 내용과 더불어 Moku:Pro 사용 설명 및 피드백을 제공해 주신 Andrew Wade, Kirk McKenzie 및 The Australian National University에게 감사의 말씀을 올립니다. ANU의 실험은 중력파 발견을 위한 ARC Centre of Excellence for Gravitational Wave Discovery의 지원을 받았습니다.
참고자료
[1] Doyle, J. C., Francis, B. A., and Tannenbaum, A. R. (2013). Feedback control theory. Courier Corporation.
[2] Black, E.D., 2001. An introduction to Pound–Drever–Hall laser frequency stabilization. American journal of physics, 69(1), pp.79-87.
질문이나 의견이 있으십니까?
액체 기기에 문의하세요 고객 지원.

