このブログでは、リアルタイム フィードバックとオシロスコープの視覚化を活用して効率的に調整し、単位ステップ応答法を使用してデジタル PID コントローラーをチューニングするための実用的なガイドを提供します。
デジタルをチューニングするとき PIDコントローラー、ゲインプロット上でパラメータをインタラクティブに調整し、埋め込み型ディスプレイでリアルタイムに応答を観察することができます。 オシロスコープこれにより、従来の方法よりも実験的にコントローラーの調整がはるかに簡単になります。 フィードバックシステム、ユーザーによる計算ははるかに少なくて済みます。周波数領域制御の詳細なガイドについては、 アプリケーションノート.
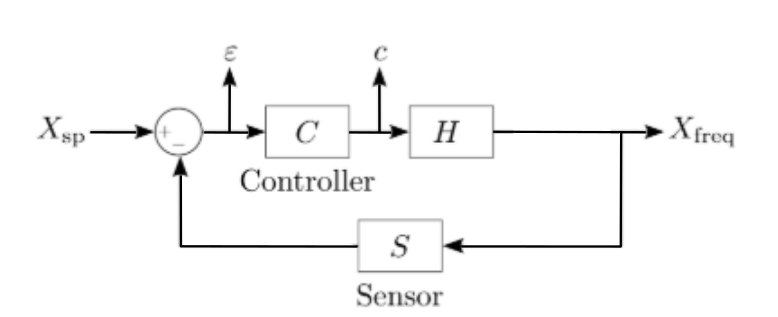
図1: 典型的なフィードバック制御システムのブロック図
図1に示すようなフィードバック制御ループを構築する場合、ブロック図アプローチを使用すると分析を大幅に簡素化できます。図1は閉ループ周波数制御システムを示しており、Xsp 設定点入力を表し、Cはコントローラを表し、Hは制御対象システムを表し、Xは周波数 システムの出力周波数を表します。フィードバック ループでは、S はシステム出力を測定するセンサーを表します。この出力を目的の設定値と比較することで、コントローラーはシステムの変化を補正できます。
希望する設定点とシステム出力の差がエラー信号 ε です。センサー出力と設定点が一致する場合、エラー信号はゼロになります。出力が希望する設定点より大きい場合、エラーは負になり、コントローラーが出力を減らすことになります。
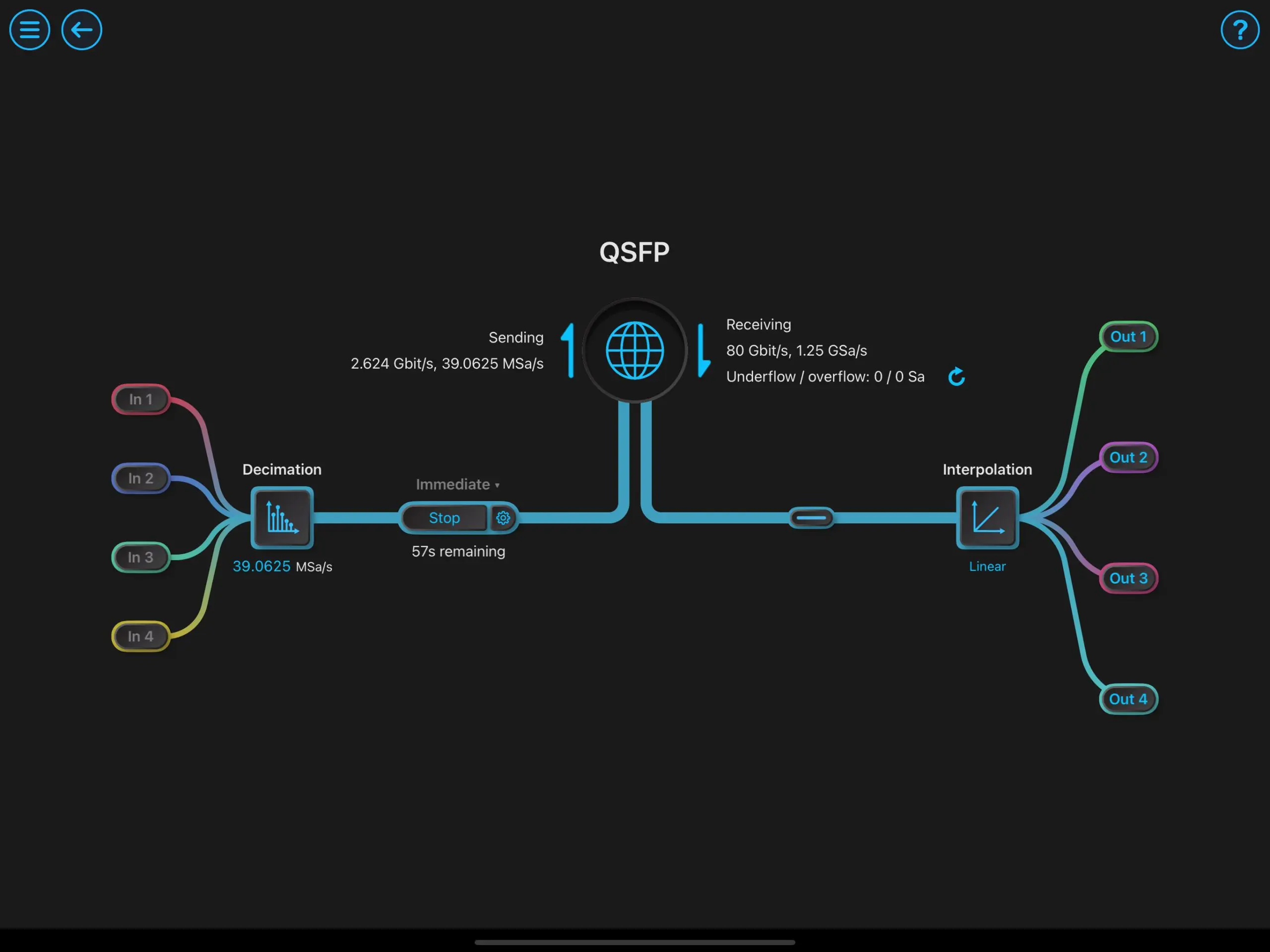
フィードバック制御システムを調整するには、さまざまな方法があります。この例では、デジタルPIDコントローラの実験的な調整方法の概要を説明します。まず、単位ステップ入力信号から始め、システムの単位ステップ応答を確認し、応答を観察しながらP、I、Dパラメータを調整して、目的の結果を達成します。テスト対象のプラントをシミュレートするには、Moku:Proを次のように構成します。 マルチインストゥルメントモード (図2)デジタルフィルタボックス(図100)の2Hz、3次ローパスフィルタを使用します。 オシロスコープの組み込み波形ジェネレーターは、入力ステップ信号として方形波を生成します (図 4)。
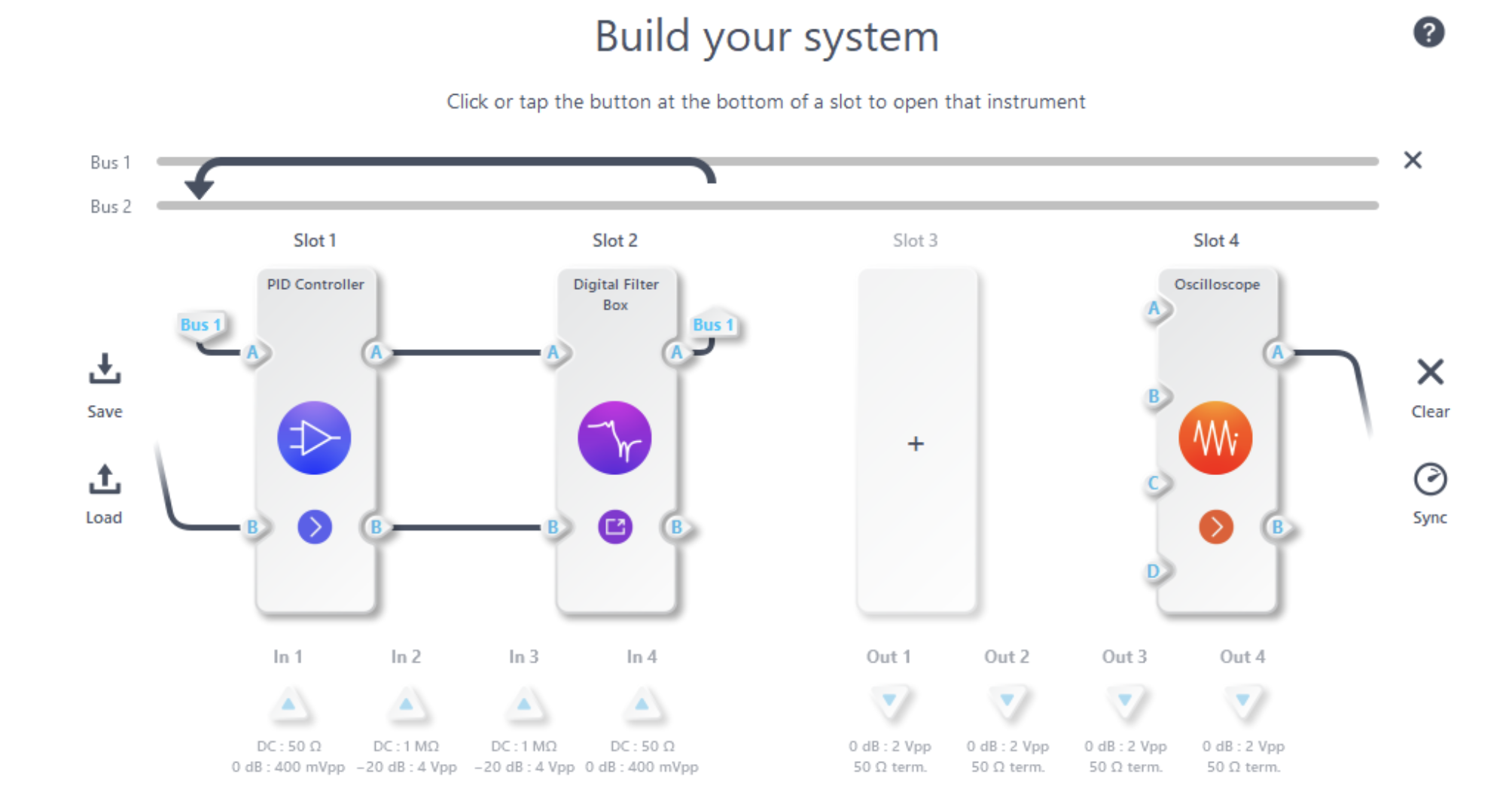
図2: デジタルフィルタボックスを使用してプラントをシミュレートするためのマルチインストルメントモード構成
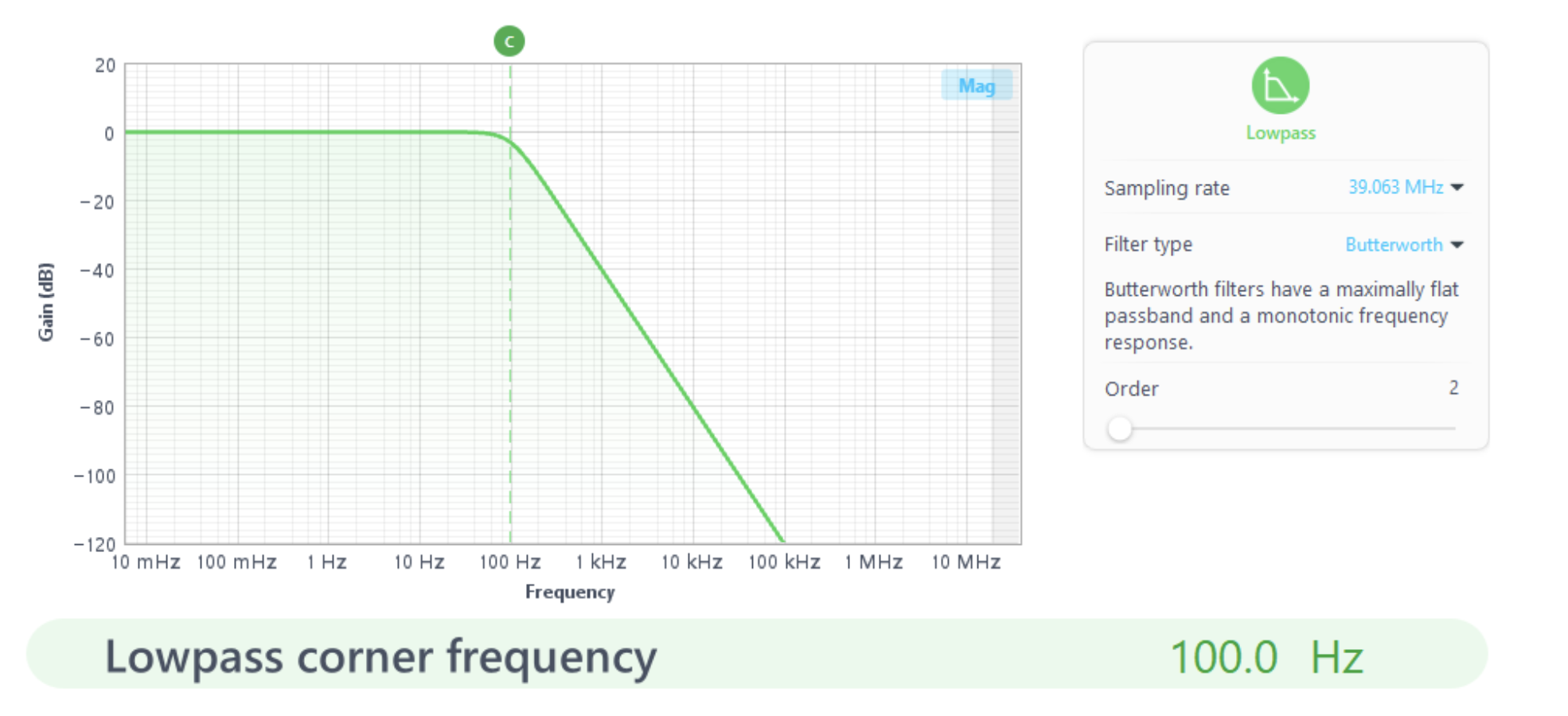
図3: デジタルフィルタボックスのローパスフィルタ構成

図4: 組み込み波形ジェネレータを使用したステップ信号生成
システムをセットアップする
- Moku:Pro PID コントローラーを図 1 の C (コントローラー) としてシステムに接続します。
- 実際のセンサ出力と所望の設定点Xspの差である入力信号と、図1のCの出力である出力制御信号が適切に設定されていることを確認します。PIDコントローラの入力制御マトリックスの詳細については、こちらをお読みください。 知識ベース記事センサーフィードバックを入力1に接続します Moku:ProMoku:Pro の出力 1 をプラントまたは制御対象システムのチューニング入力 H に接続します。このチューニング入力は、電圧制御発振器 (VCO)、レーザー変調入力、またはモーター コントローラー用になります。
- 図 5 に示すように、Moku PID コントローラーのコントローラーの前後のプローブ ポイントで、チューニング用のコントローラー ブロックと埋め込みオシロスコープをクリックしてゲイン プロット ビューを開きます。
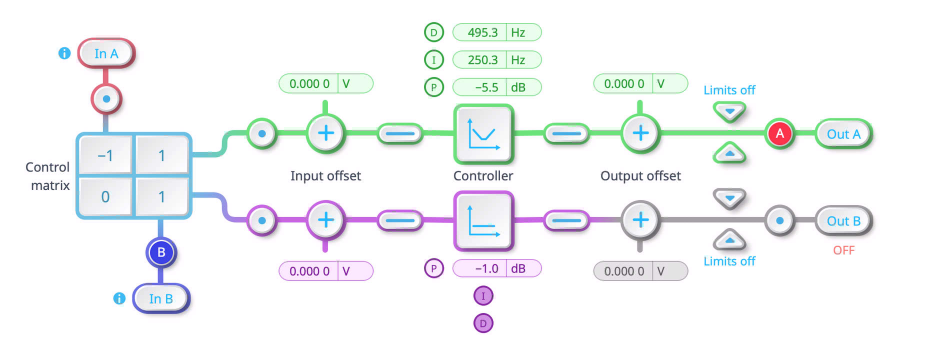
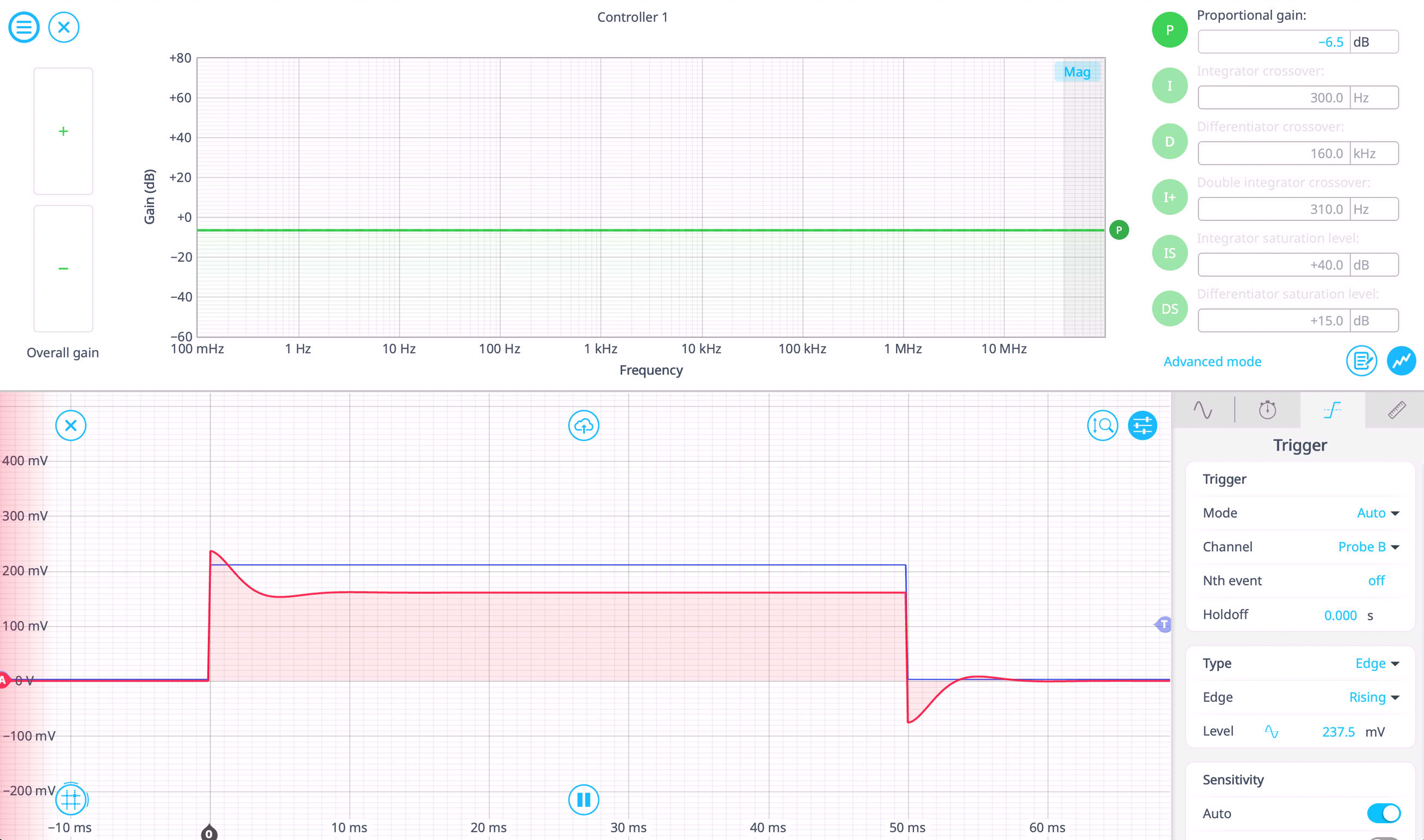
図 5: 上部は Moku PID コントローラのブロック図、下部は Moku PID コントローラのゲイン プロットと組み込みオシロスコープ ビューです。
比例(P)から始める
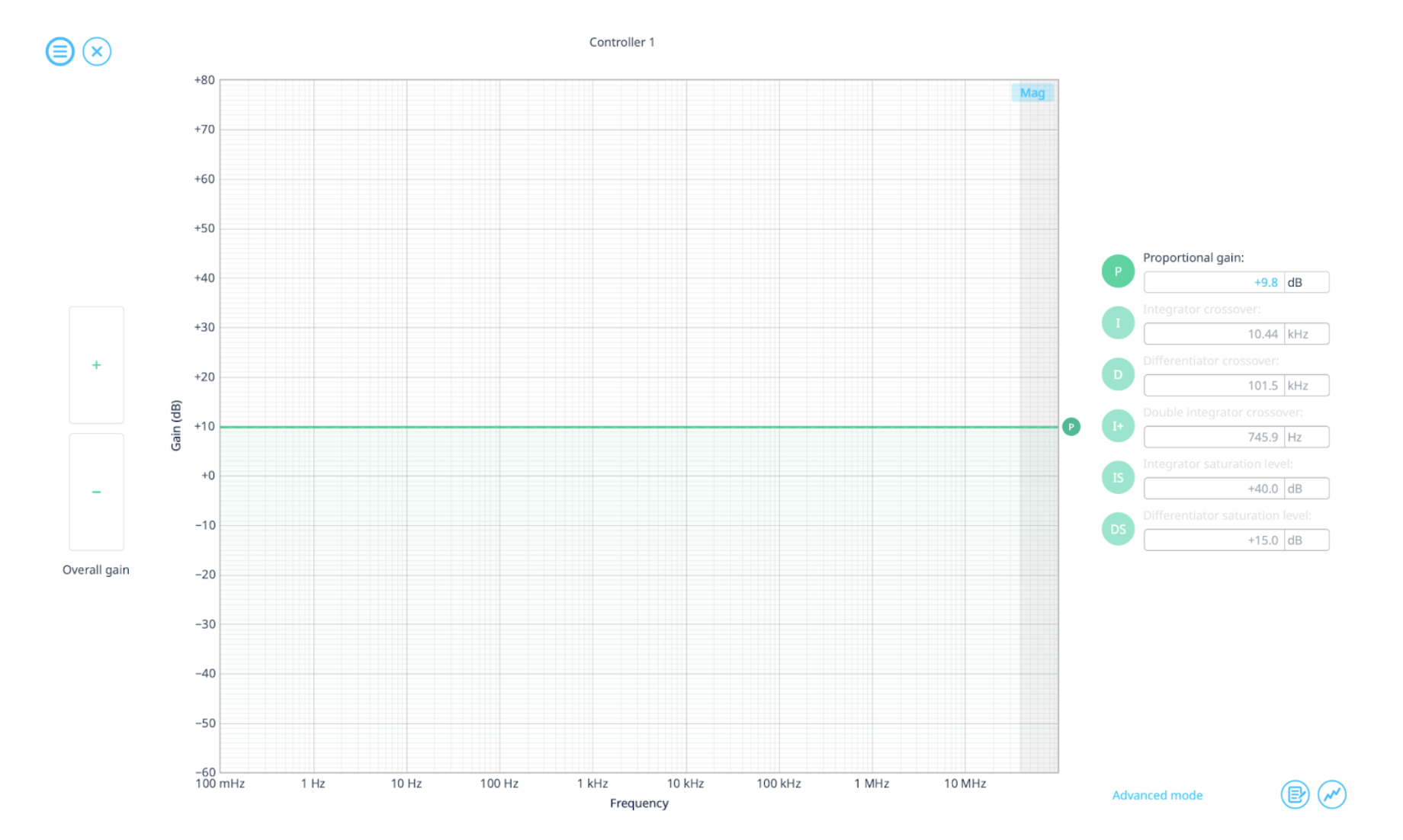
図 6: I と D がゼロになり、P が増加します。
- 最初は I と D を無効にします。
- システムが素早く応答し始めるまで、ゲイン プロット上で P をドラッグして増加させます。
- オシロスコープの出力を監視します。システムの振動が大きすぎる場合は、P をわずかに減らします。
積分(I)を追加して定常誤差を除去する
- 図 7 に示すように、定常状態の誤差を排除するために I をゆっくりと増加させます。

図 7: P を縮小し、I を修正します。
- オシロスコープのオーバーシュートを監視してください。Iが大きすぎると過度の振動が発生する可能性があります。図8では、Iを300Hzに上げると顕著な振動が発生します。
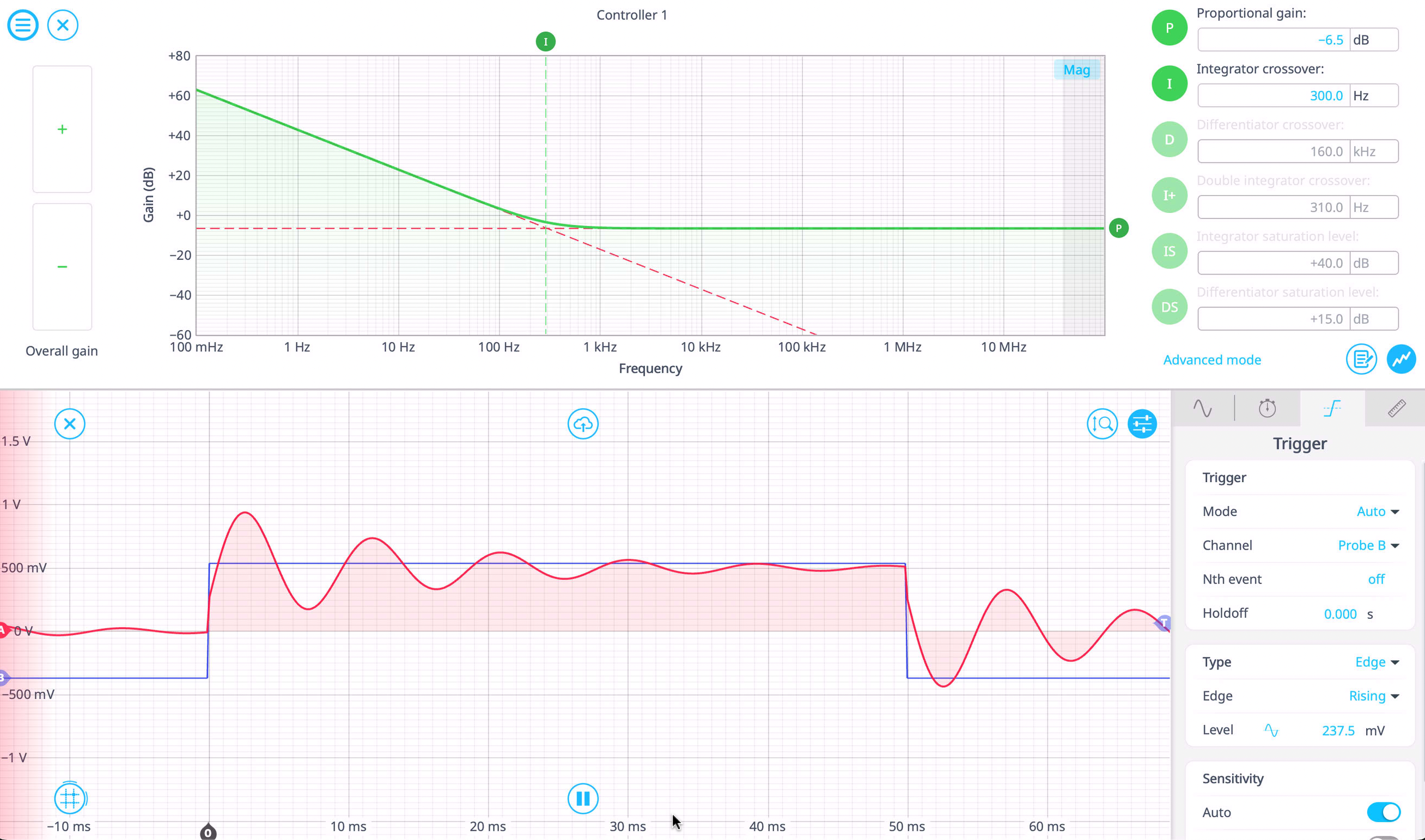
図8: Iが増加すると振動も増加します。
- 振動が増加する場合は、P をわずかに減らすことを検討してください。
安定性を向上させるために導関数(D)を追加する
- 図 9 に示すように、オーバーシュートを減らして振動を減衰させるには、D を徐々に増やします。

図 9: P と I を設定し、100 Hz で D を追加します。
- 注意: D が多すぎると、増幅された高周波信号によってシステムにノイズが発生する可能性があります。微分器の飽和項を有効にして高周波ゲインを制限することもできます。
- 最適なパフォーマンスを得るために、オシロスコープを観察しながら P、I、D をインタラクティブに調整します。
応答をさらに微調整するには、小さな調整を使用して、オシロスコープでリアルタイムの応答を観察します。オシロスコープの内蔵測定を使用して、立ち上がり時間、オーバーシュート、アンダーシュートなどを監視し、必要に応じてこの情報をファイルに記録することもできます。これらのオシロスコープのトレースは、.MATファイルとしてエクスポートすることもできます。 MATLABでのさらなる分析必要に応じて、外部コンポーネント、フィルター、またはサンプリングレートを保護して安定性を高めるために出力制限を調整します。カスケードコントローラを実装するには、 マルチインストゥルメントモード on Moku:Pro.