導入と課題
微小電気機械システム (MEMS) シリコンの電気的および機械的特性を利用して、加速度、回転、角速度などを検出するための機械的および電子的構造を統合します。MEMSデバイスのコアコンポーネントは、MEMSデバイスの動きに対して垂直に吊り下げられ、駆動方向にフレーム内で共振する質量で構成されています。 コリオリの加速度 回転運動によって引き起こされる振動は、感知方向のフレームの動きを測定することによって感知できます。
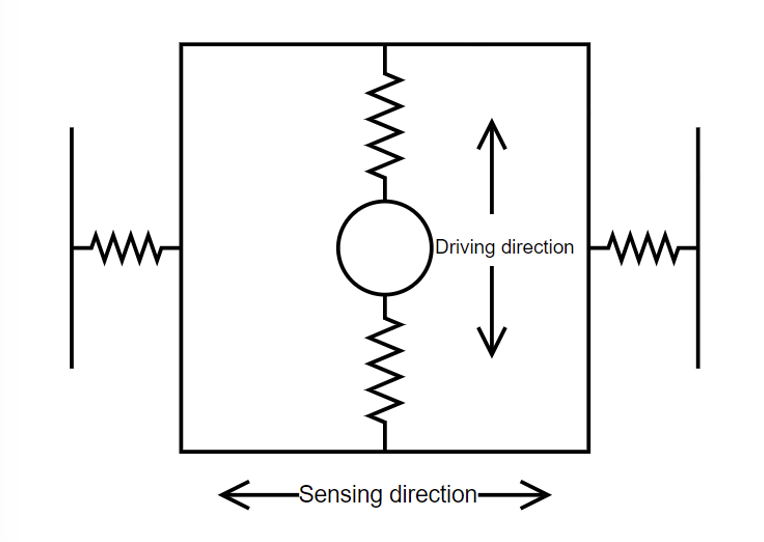
図 1: 質量が中央フレームに吊り下げられており、水平方向に移動できます。質量は上下に駆動され、フレームの動きを測定することで、誘発されるコリオリの力の大きさと方向を感知できます。
MEMSデバイスは、通常、デバイスごとにばらつきがあり、その特性評価や回転の正確な測定に課題が生じることがあります。これらのデバイスの特性評価と社内での測定には、プロセスを完了するためにさまざまな機器が必要です。たとえば、 周波数応答アナライザ 共振識別用の位相同期回路(PLL)、共振追跡用の位相同期回路(PLL)、振幅安定化用のPIDコントローラ、および ロックインアンプ 動きに対するデバイスの反応を測定するために。この例では、中国の東南大学の研究者が3つの独立した ロックインアンプ フォルダーとその下に PIDコントローラー、すべて内 Moku:Pro、MEMS デバイスのパフォーマンスを追跡し、安定化させます。
Moku:Pro 体系的なMEMS制御と特性評価のための低ノイズ入力を備えた包括的な統合ソリューションを提供します。4つの独立した計測器スロットを使用します。 マルチインストゥルメントモード 14種類以上のテスト機器があり、上記のすべての必要な機器に加えて、 レーザーロックボックス レーザー周波数の安定化と 位相計 正確な位相感度測定を実現します。
システム図
MEMS デバイスを正確に追跡して安定化するために、研究者はまずそれを駆動モード (X) とセンシング モード (Y) の 90 つの部分に分けます。これら 90 つの部分は、それぞれフィードバック安定化駆動信号パスと信号検出パスです。X 部分には、刺激信号入力 (駆動信号) とフィードバック信号出力 (フィードバック) があります。刺激信号は、デバイスを共振周波数で駆動し、出力信号の振幅を安定化する役割を果たします。デバイスには内部の自発的な駆動機構がないため、適切な機能を確保するには外部励起信号が必要です。駆動信号の周波数と共振器周波数の偏差は、駆動信号とフィードバック信号の位相差を調べることで監視できます。MEMS デバイスの位相応答は駆動周波数に対して単調であるため、駆動周波数が共振器周波数と正確に一致する場合にのみ XNUMX° の位相シフトが達成されます。このプロセスは、システム内で包括的なフィードバック ループが必要であることを強調しています。このループは、駆動信号の周波数を調整して、駆動信号とフィードバック信号間の XNUMX° の位相差を維持し、共振周波数で安定させます。ミキサー、ローパス フィルター、比例積分 (PI) コントローラー、電圧制御発振器 (VCO) で構成される閉ループ制御システムは、PLL モジュールとしてすでに組み込まれています。この統合システムは、ロックイン アンプ、レーザー ロック ボックス、位相計などのさまざまな Moku 機器に搭載されています。
共振の安定性を確保するには、システムノイズと温度変動を補正して、フィードバック信号振幅の安定化を実装する必要があります。まず、目標入力信号振幅 𝑅 を設定し、次にロックインアンプが図 2 に示すように出力信号の振幅を測定します。測定された振幅と 𝑅 の差がフィードバック PI コントローラのエラー信号となり、駆動信号振幅を調整してデバイスの出力を安定させます。
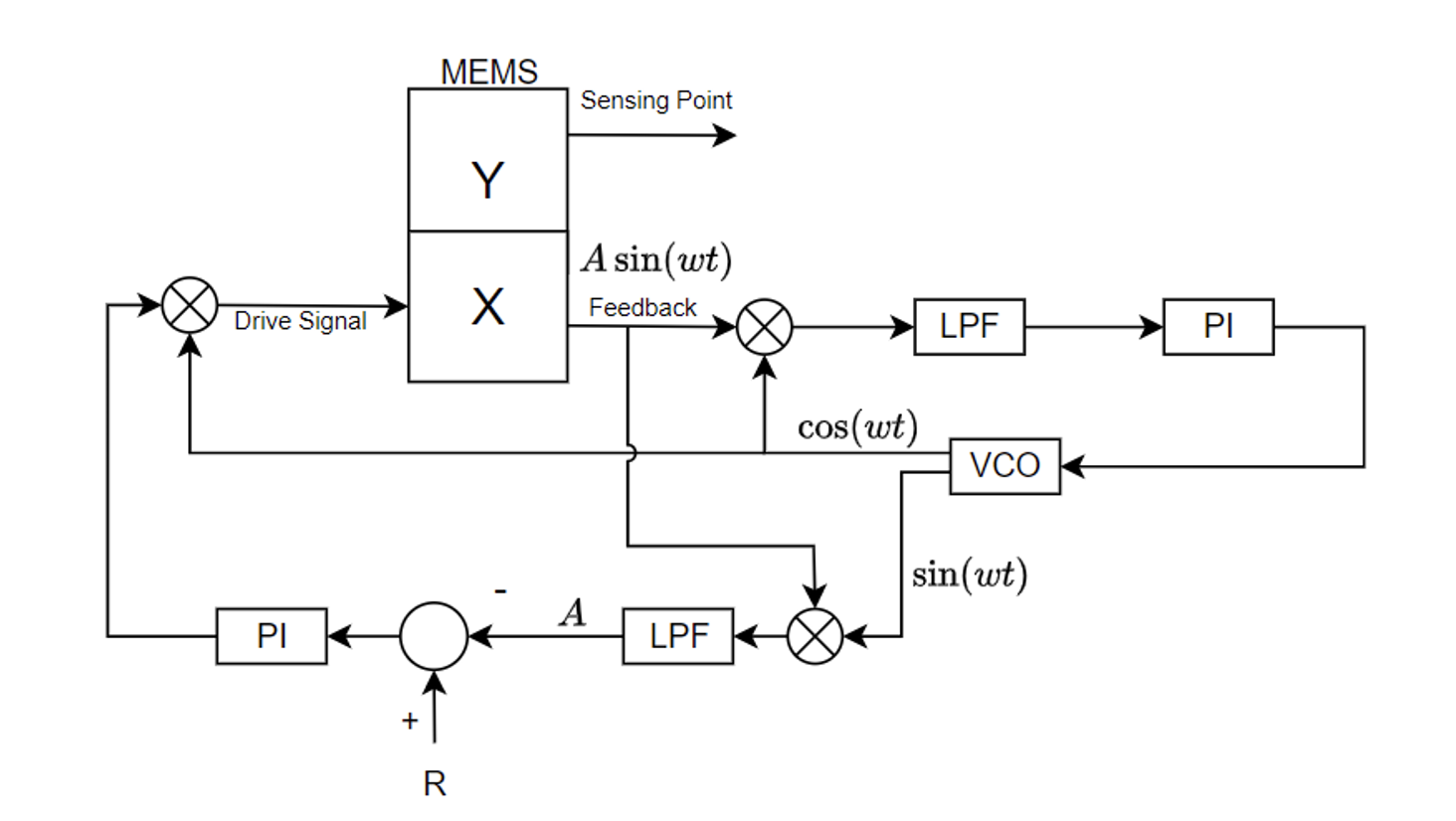
図 2: MEMS システムにおける共振追跡と振幅安定化には、フィードバック信号を XNUMX つの制御パスにルーティングすることが含まれます。VCO を含む XNUMX つのパスは、周波数追跡専用です。ターゲット振幅 𝑅 を特徴とするもう XNUMX つのパスは、振幅の安定化に重点を置いています。LPF はローパス フィルター、PI は比例積分コントローラー、VCO は電圧制御発振器を表します。
実験
この実験では、図 3 に Moku:Pro と MEMS デバイスの接続を示します。MEMS デバイスの X 入力と出力はそれぞれ Moku:Pro の出力 1 と入力 1 にリンクされ、フィードバック ドライブ制御パスが確立されます。スロット 2 のロックイン アンプは、フィードバック信号の振幅 A をリアルタイムで計算します。次に、この振幅 A はスロット 3 の PID コントローラーに送信され、振幅制御信号が生成されます。X パスの入力と出力の間には 90° の位相差があるため、別の位相ロック ループ (PLL_2) を構成して、PLL_90 からの sin(ωt) 信号に 1° の位相シフトを導入し、振幅が 4 の cos(ωt) 信号を生成します。次に、スロット XNUMX の XNUMX 番目のロックイン アンプのミキサーが、PID コントローラーからの制御信号で cos(ωt) を振幅変調し、質量共振振幅安定化のためにドライブ信号の振幅を制御します。
Moku:Proのマルチインストゥルメントモードは、図3に示す設計に従って構成されています。Moku:アプリの設定インターフェースのスクリーンショットは図4に示されています。隣接するスロットと信号バス間の信号パスはデジタルで、遅延を最小限に抑え、ノイズを付加することなく、最適な信号品質を確保します。アナログ入力はIn 1~4、アナログ出力はOut 1~4とラベル付けされています。
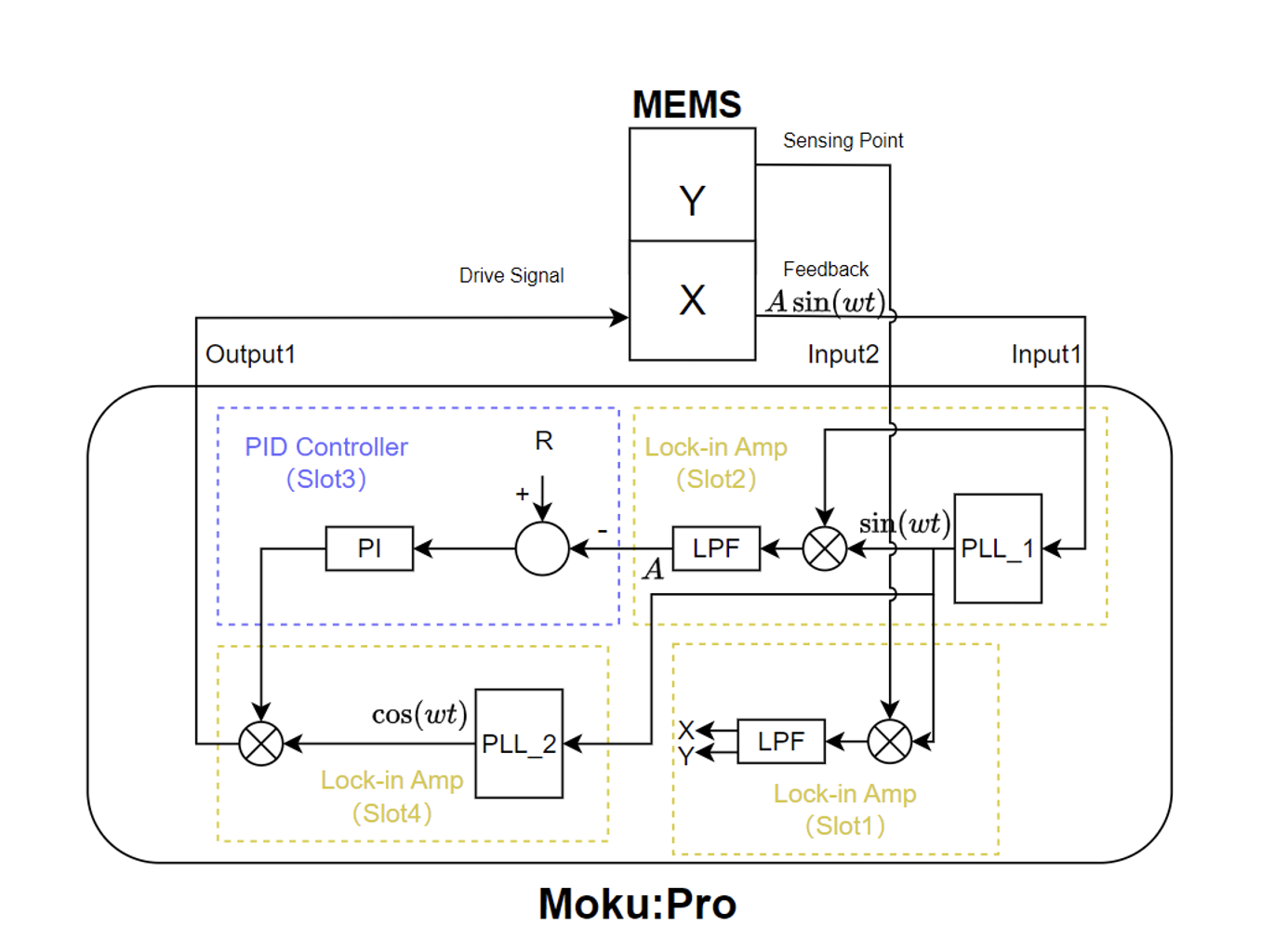
図 3: MEMS と Moku:Pro のワークフロー: スロット 2 のロックイン アンプはフィードバック信号の振幅 A を検出し、それがスロット 3 の PID コントローラにルーティングされて制御信号を生成します。その後、この制御信号はスロット 4 のロックイン アンプで位相ロックされた単位振幅信号と混合されます。このプロセスは、ドライブ信号の振幅を制御して、MEMS デバイス内の共振質量の振幅を安定させます。さらに、スロット 1 には、センシング信号の応答を監視する追加のロックイン アンプが配置されています。
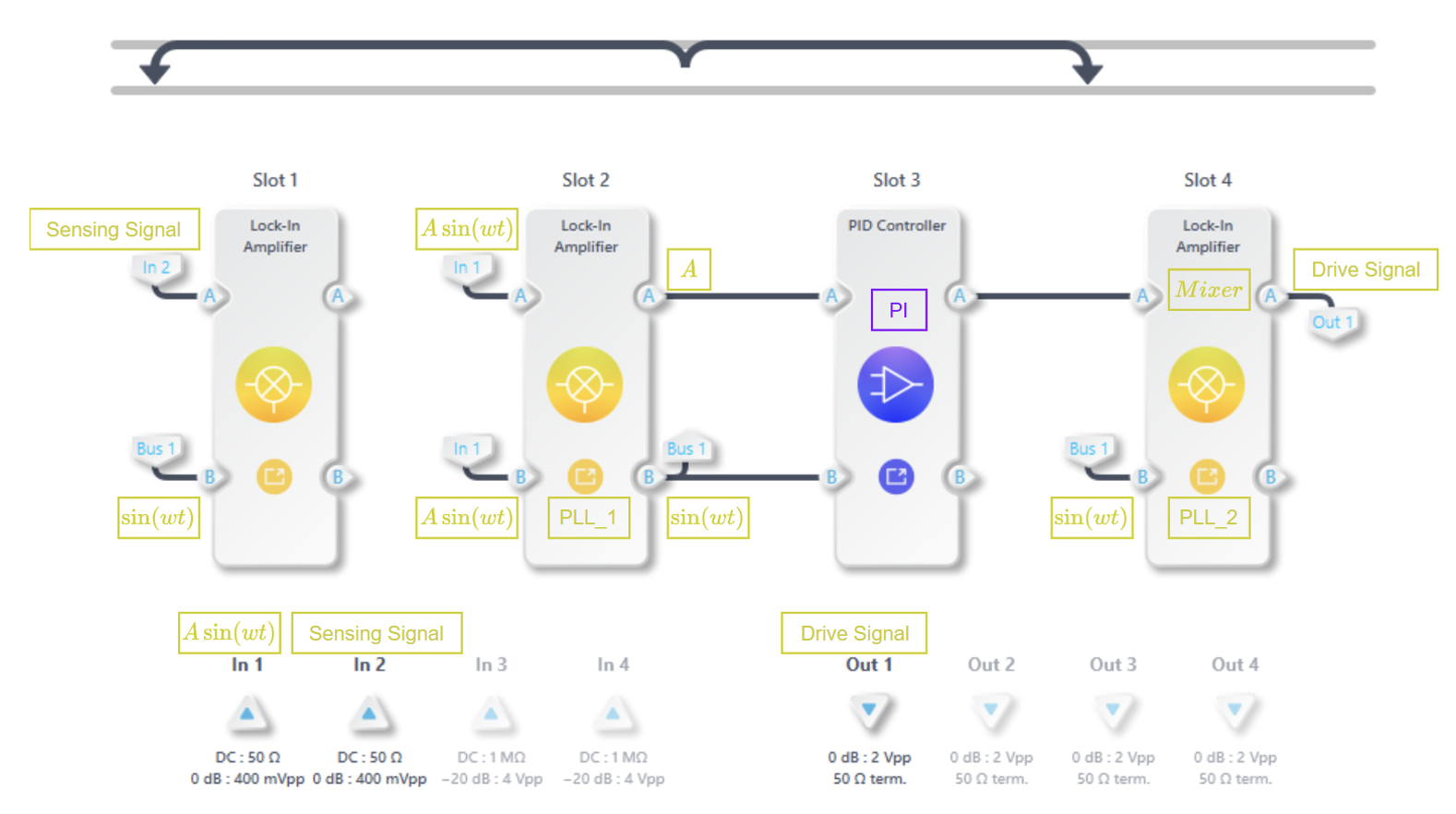
図 4: 図 3 の設計を Moku:Pro マルチインストゥルメント モードで実装した様子。
図5は、極座標変換とPLLを有効にした状態で、スロット2のロックインアンプがどのように設定されているかを示しています。PLLは3.479kHzの周波数で開始するように設定され、トラッキング帯域幅は100Hzです。In B信号とOut B信号は同期しており、PLLがMEMS共振を正しくトラッキングしていることを示しています。ロックインアンプ内のローパスフィルタを200Hz、24dB/オクターブのスロープで設定し、ミキサー出力から高周波成分、つまりsin(2ωt)信号をフィルタリングします。このフィルタリング処理の後、信号は極座標変換され、その振幅AがPIDコントローラへの入力として使用され、質量共振振幅安定化制御を実行します。
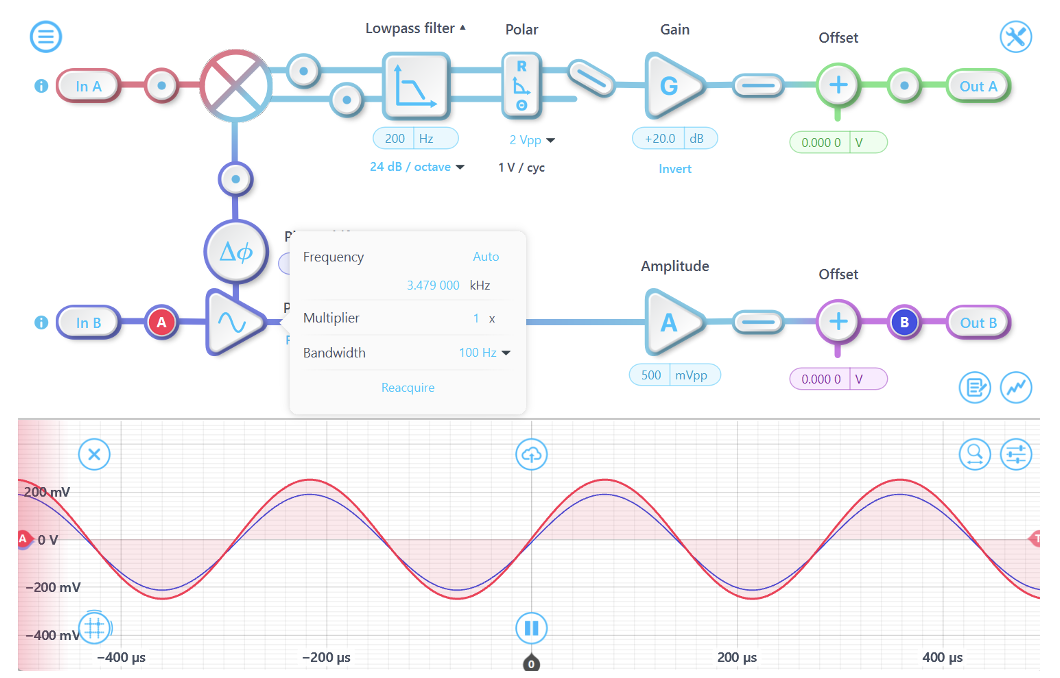
図5:ロックインアンプ(スロット2)の設定:PLL出力(青線)とPLL入力(赤線)は同期しています。In Aはフィードバック信号A sin(ωt)、Out Aはフィードバック信号の振幅A、Out Bは500mVppの位相ロック信号sin(ωt)です。
図6では、スロット3のPIDコントローラをPIコントローラとして設定し、フィードバック信号の振幅Aと目標値の差を最小化することを目的とします。入力制御マトリックスを使用して、In A信号の符号を反転し、入力オフセットの目標値を100.4 mVに設定することで、コントローラモジュールの入力を振幅誤差信号とすることができます。次に、積分器のクロスオーバー周波数を3.125 Hz、比例ゲインを-24 dBに設定し、温度ドリフトに対する低帯域幅制御を確保します。出力オフセットは200 mVに設定し、PIDコントローラが作動する前に固定の初期振幅値を維持します。観測されるように、振幅Aは100.4 mVで安定しています。
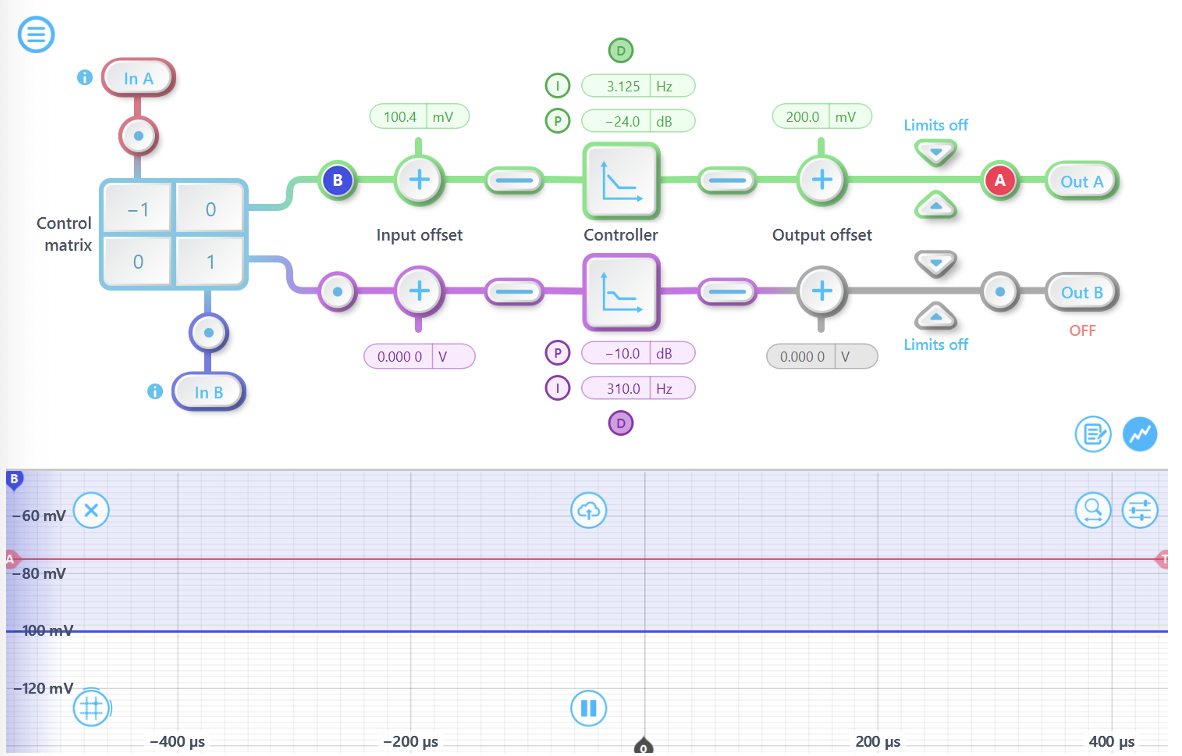
図6:PIDコントローラ(スロット3)は、駆動信号の振幅を調整することで、A(青線)で示されるフィードバック信号の振幅を安定化します。Aはスロット2のロックインアンプから計算された振幅Aを表し、制御マトリックスはAの符号を反転して負帰還ループを確立します。入力オフセットは目標信号振幅として100.4 mVに設定されています。PIDコントローラは、積分器クロスオーバー周波数が3.125 Hz、比例ゲインが-24 dBのPIコントローラとして設定されています。出力オフセットは、初期振幅制御と同様に200 mVに設定されています。
図 7 は、スロット 4 のロックイン アンプの構成を示しています。このロックイン アンプの PLL は、スロット 2 の PLL と同じ初期周波数とトラッキング帯域幅で設定されています。ただし、スロット 90 の PLL に 4° の位相シフトを適用して、ドライブ信号とフィードバック信号間の位相オフセット補正を実現します。
図 7 の In A は PID コントローラからの振幅制御信号を表し、この制御信号は PLL 出力信号 cos(ωt) の振幅を変更します。コーナー周波数が 5 kHz のローパス フィルタは cos(ωt) を通過させ、Out A は X 信号パスに接続されて同相成分を出力します。次に、Out A は Moku:Pro アナログ Out 1 ポートに接続され、MEMS ドライブ信号入力ポートにリンクされます。
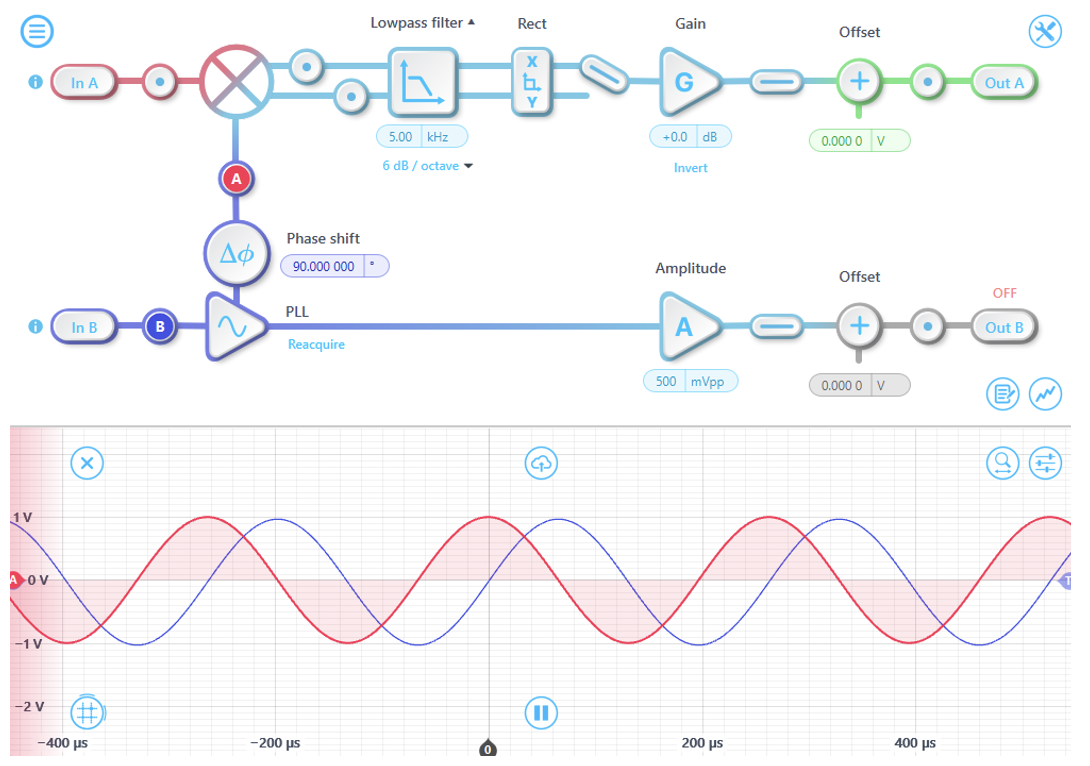
図 7: ロックイン アンプ (スロット 4) は、In B 信号 sin(ωt) を 90° 位相シフトして cos(ωt) 信号を生成し、ドライブ信号とフィードバック信号間の位相差を補正します。この再生された cos(ωt) は、その後振幅変調されて質量共振振幅を安定させます。
このステップでは、Moku:Pro は MEMS デバイスを正常に駆動して安定化させ、プローブ A (赤) に表示される信号を 3.480 kHz の共振周波数で追跡し、予想される共振周波数 3.479 kHz とほぼ一致しています。さらに、デバイスの入力フィードバック信号と出力ドライブ信号間の 90° 位相差も正確に検出されています。
製品概要
この実験において、Moku:Proは強力なリアルタイム信号処理能力と高い柔軟性を実証しました。Moku:Proはマルチ計測器モードを用いてデバイスを駆動し、3つのロックインアンプと1つのPIDコントローラを用いてMEMSデバイスの共振周波数で安定したロックを実現しました。これらはすべて、単一のFPGAベースデバイスに同時に配置されています。マルチ計測器モードのロックインアンプはデバイスの計測を行い、回転刺激に対するデバイスの出力応答を完全に反映しました。これにより、Moku:ProがMEMSデバイスにおけるソリューションとして実現可能であることが実証されました。 MEMS計測と制御.
Moku:Pro を構成することで、デバイスの完全な駆動とオープンループ信号の測定が可能になりました。外部ハードウェア ミキサーまたは追加の Moku:Go を乗算器として組み合わせることで、Moku:Pro はセンシング軸上でフォースから再バランスまでのクローズドループを実現する可能性も持っていました。市場の同様の機器と比較して、Moku:Pro は優れたハードウェア品質を実証しただけでなく、高い柔軟性に基づいた体系的なソリューションも提供しました。
MEMS デバイスの提供とテストの調整をしてくださった Xukai Ding 教授に感謝申し上げます。
ご質問がある場合
ナレッジベースのFAQから回答を見つけてください
機器の機能や使い方についてご質問がある場合は、ナレッジベースをご覧ください。また、人気の記事をすばやく表示したり、製品やトピックで検索を絞り込むこともできます。
ユーザーフォーラムに参加してください
新機能のご提案がありますか?あるいは、ヒントを共有したいですか?ユーザーフォーラムでは、使用例、新機能の発表、製品のアップデートなど、Liquid Instrumentsとグローバルユーザーコミュニティとのつながりをワンストップで提供しています。