イントロダクション
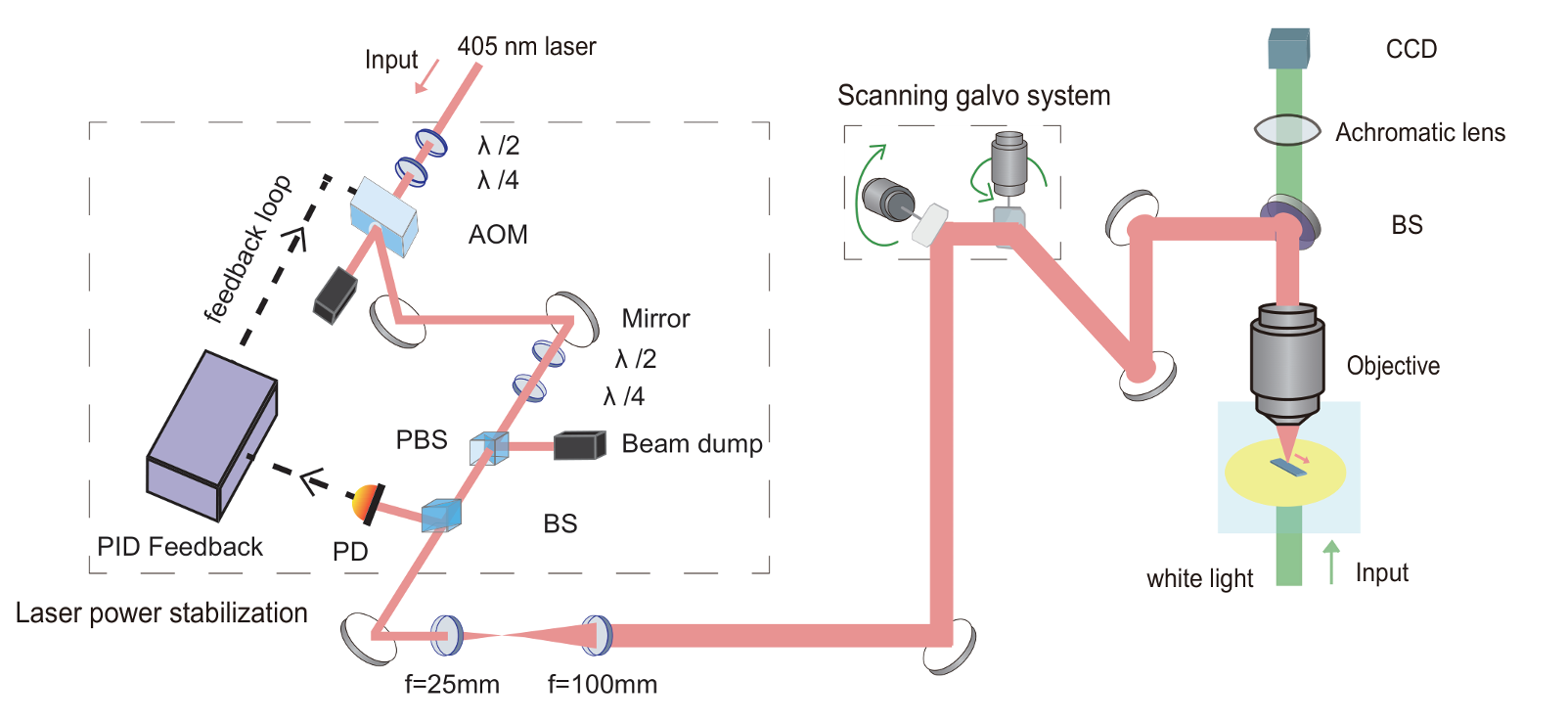
光リングキャビティを使用すると、研究者は選択したモードのみを透過させることで入射光をフィルタリングできます。この技術は、光干渉法や分光法などのアプリケーションで徹底的に調整されたレーザー ビームが必要な場合に役立ちます。研究者は多くの場合、結果として得られるビームがガウス プロファイルを持つように、最低次モード (ガウス モード) を対物レンズとして選択します。光リングキャビティへのアライメントを成功させるには、キャビティの入射界面であるミラーに対するビームウエストの位置とサイズ、ならびにビームの水平および垂直位置と傾斜角を正確に設定する必要があります。
フロケットは、オーストラリア国立大学のスピンアウト企業 Aqacia と量子コンピューティング サービス プロバイダー 2pi Software との合弁事業であり、 ディープラーニングオプティマイザー (DLO)、量子およびその他の複雑なシステムを最適化するために設計された機械学習システム。通常、このようなシステムは時間やリソースが限られているためサンプリングにコストがかかり、リングキャビティの位置合わせの課題よりも高次元です。このグループは、DLO のクラウドベースの性質を利用して、DLO を Moku:Go、FPGAベースのテストおよび測定デバイス 革新的なソフトウェア定義テスト/計測ソリューションのリーディングプロバイダーであるLiquid Instruments (図1)。
Moku デバイスは、複数のソフトウェア定義機器を 1 つのハードウェアに統合し、光リング キャビティをシームレスかつ自動的に調整するために必要な汎用性を提供します。Moku デバイスは、API 対応の自動化機能を備えているため、このタスクに特に適しています。このアプリケーションでは、Moku:Go のポータビリティと小型フォーム ファクタが、高速で柔軟なパフォーマンスというさらなる利点をもたらしました。
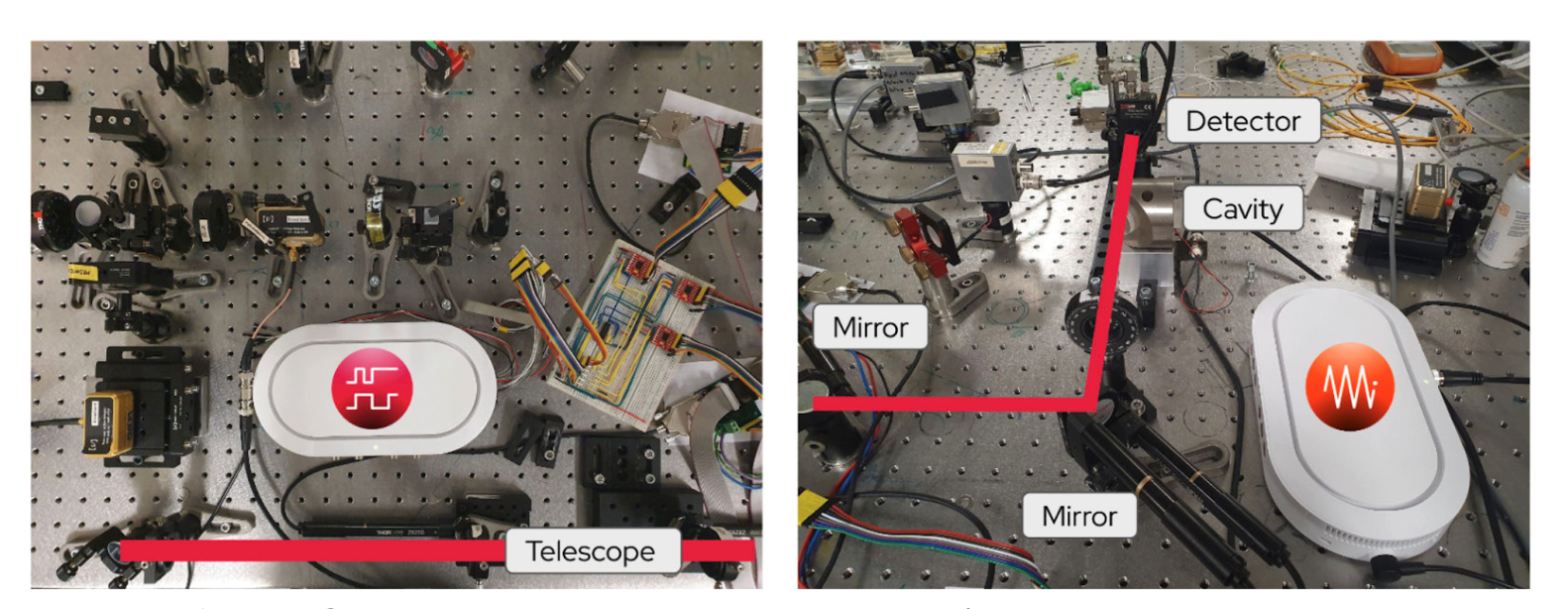
図 1: デジタル入出力ポートを使用して光学テーブル上で実験内の他のサブシステムを制御するMoku:Go
DLO は、ニューラル・ネットワーク・アンサンブルとヒューリスティック・エンジンを使用して、一連のトレーニングと予測シーケンスを繰り返し実行します。このアプローチは、従来の人ベースのメカニズムで現在可能であるよりも迅速かつ正確に、ターゲット システムに適切な制御プロファイルを確立するのに役立ちます。
実験装置と産業装置の両方に適切な制御設定を確立することは、装置の機能が意図したとおりに一貫して機能することを保証するために重要です。 DLO と Moku:Go は連携して、特に次のような場合に、高度に自動化された方法でこの機能を有効にします。
- ターゲットシステムがスパースサンプリング制約の下で制限的に動作する場合。
- サンプルデータの取得に金銭的なコストがかかる場合。
- 対象の領域が高次元である場合。
- ターゲットシステムは周期的に動作するため、自動化のメリットが得られる場合。
- パラメータに厳しい制限が存在し、従来の学習アルゴリズムの多くが使用できない場合。
課題
従来、レーザービームを光キャビティに位置合わせするには手動介入が必要でした。大まかな位置合わせは、キャビティの入力窓から反射されたビームの経路に検出器を配置することによって達成できます。検出されたスペクトルを観察しながら、科学者は、一対のモードマッチングミラーを使用して入射ビームの位置と傾きを調整し、ビームウエストサイズを調整し、一対のレンズを使用して位置を最適化する必要があります。このプロセスは、検出器信号の吸収ディップが観察されるまで続きます。科学者が何らかの光が空洞に入っていると確信している場合、空洞の出力窓の後に検出器を配置し、そこで空洞を透過した光を検出できるようにします。最後に、透過スペクトルが目的のモードで単一のピークを形成するまでミラーとレンズを調整します。
キャビティの位置合わせプロセスは時間がかかり、複数の光路を含む複雑な実験の場合は、キャビティごとにプロセスを繰り返す必要があります。さらに、温度変動や機械的摂動などのドリフト源により、アライメントを定期的に調整する必要があります。 DLO は、この問題によって生じる6次元状態空間を容易に最適化できます。ただし、DLO のソフトウェア出力を物理的な調整に変換するには、制御層が必要です (図2)。
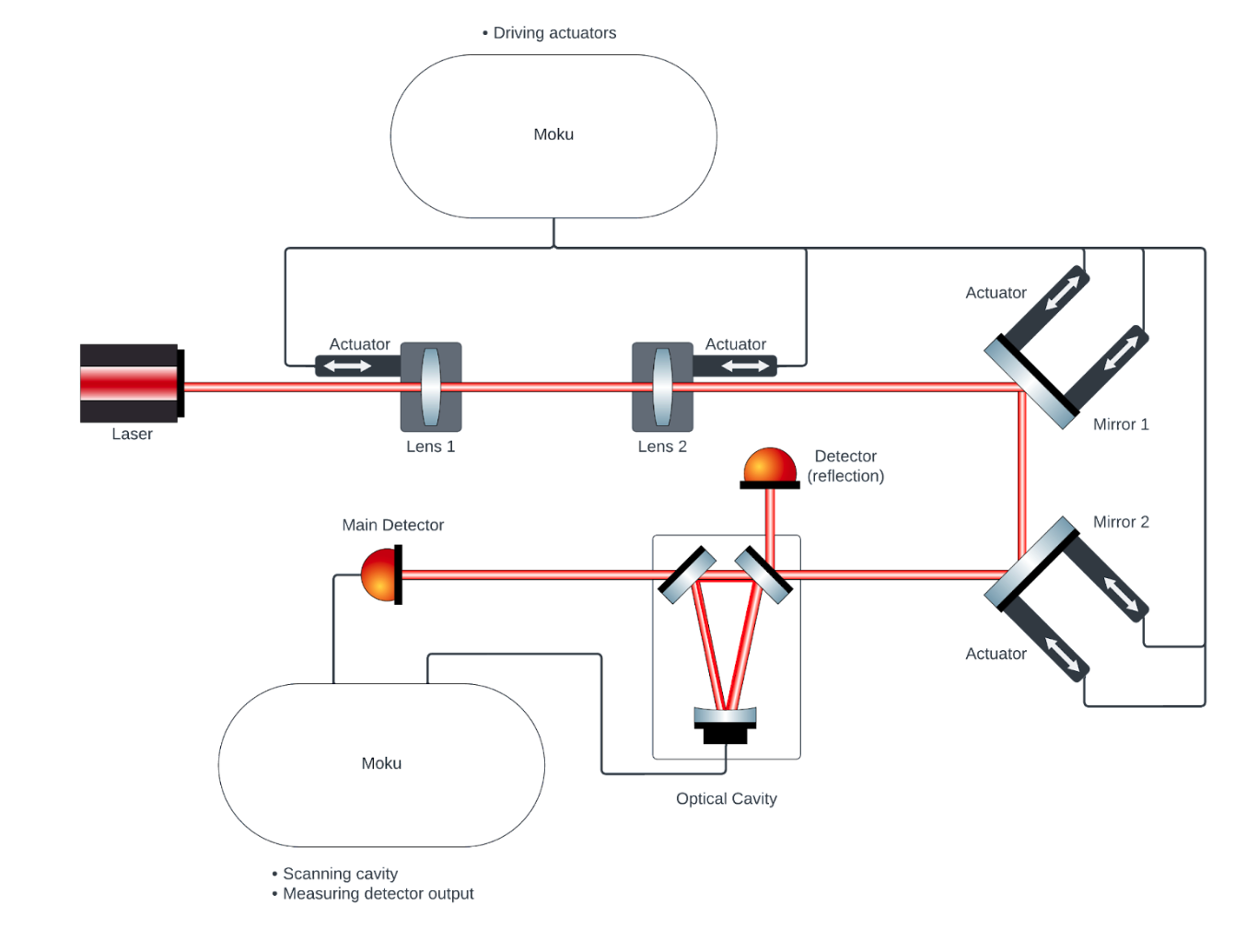
図 2: 2台の Moku:Go デバイス、レーザー光源、およびその他の光学コンポーネントを含む光学セットアップ。
ソリューション
Moku:Go の使用 ロジック・アナライザ ステアリングミラーに取り付けられたアクチュエーターのドライバーとして、 オシロスコープ Floquet は、キャビティをスキャンして検出器信号を記録するために、光キャビティに対するレーザーの位置合わせを自動化することに成功しました。ロジック アナライザーは DLO から予測された設定を取得し、アクチュエーターを新しい位置に駆動するためのパルス列を生成します。次に、オシロスコープは、DLO による分析のために検出器信号を測定します。このサイクルは、キャビティが最高の品質の位置合わせを達成するまで繰り返されます。
結果
FloquetはDLOをMoku:Goに統合し、光共振器へのレーザービームの自動アライメントを可能にしました。最初の手動アライメントでターゲットモードが見え、識別できる限り、システムは高品質のアライメントを見つけ、維持することでアライメントを引き継ぐことができます。自動化されたDLO駆動システムは、同等以上のアライメント品質で、アライメント速度において熟練した人間のオペレーターを明確に上回ることができました。図3は、測定されたコスト関数(光検出器での強度)とラン数の増加を示しています。斜線を引いた領域は、初期サンプリング、つまりラン0から25までの短いプラトーを強調している。600回の実行までに、DLOは光共振器のアライメントを、ビームの楕円率によって課される限界の範囲内に最適化し、いくつかの最適なアライメントは、わずか300回の実行で発生しました。
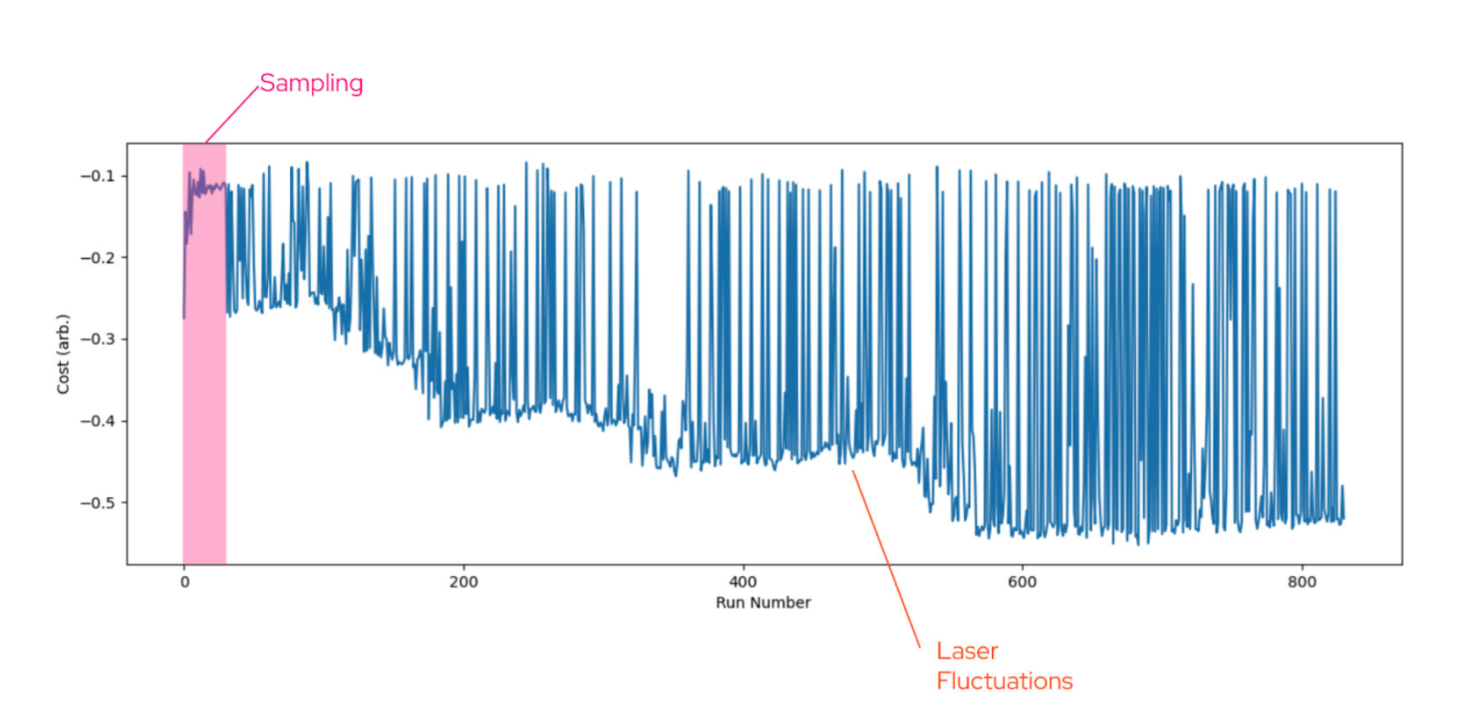
図 3: 測定されたコスト関数と実行数の結果。
図4は、最適化プロセス中のランダムなミラーとレンズ構成における、可視性のために DC オフセットを加えた光検出器出力のスナップショットを示しています。右の図は、DLO によって決定された最終構成のスペクトルを示しています。望み通り、光パワーのほぼすべてがガウスモードに転送されました。
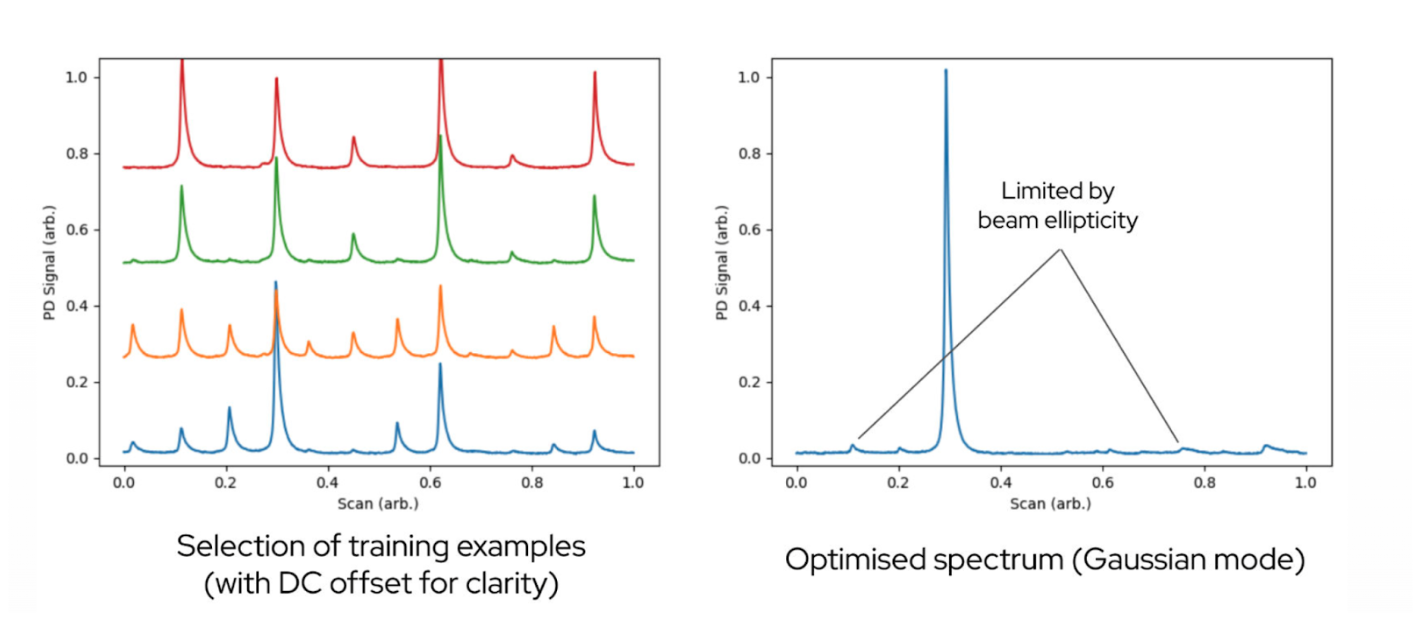
図 4: トレーニング例の光検出器の出力 (左) と最適化されたスペクトル (右)。
Moku:GoとDLOを統合することで、Floquetはラボで簡単に導入できる光学系の自動アライメント・システムを作り上げ、この技術の組み合わせが物理システムに高度な機械学習機能を提供する力を持つことを証明しました。
ご質問がある場合
ナレッジベースのFAQから回答を見つけてください
デバイスの機能や機器の機能について質問がある場合は、当社の広範な情報を確認してください。 ナレッジベース 探している答えを見つけるために。また、人気の記事をすぐに確認したり、製品やトピックごとに検索を絞り込んだりすることもできます。
ユーザーフォーラムに参加してください
新しい機能をリクエストしたいですか?共有できるサポートのヒントがありますか?使用例から新機能の発表など、 ユーザーフォーラム 製品のアップデートだけでなく、Liquid Instruments や当社のグローバル ユーザー コミュニティとのつながりも提供するワンストップ ショップです。